

水下仿生扑翼机器人的驱动控制研究
机器人
描述
作者:曹勇 曹永辉 黄桥高 屈毅林 潘光
海洋覆盖着地球表面的71%,据不完全统计,海洋中的鱼类超过1.2万种。LINDSEY根据不同推进部位将鱼类推进模式分为2大类:身体或尾鳍推进(BCF)、中央鳍或对鳍推进(MPF)。根据已有的生物学信息可知:自然界中85%的鱼类以BCF模式游动。基于BCF模式游动具有快速性、高效性,同时,存在着稳定性不佳、低速时效率较低等缺点。基于MPF模式游动的鱼类由成对的胸鳍、背鳍、臀鳍的拍动或波动产生推力。近年来,基于MPF模式游动的鱼类以其优异的机动性和稳定性逐渐受到科研工作者的关注。
蝠鲼,又被称为魔鬼鱼,是一种典型的基于MPF模式游动的鱼类,属于脊索动物门、软骨鱼纲、燕魟目、蝠鲼科、蝠鲼属;其头侧有一对向前突出的由胸鳍分化的头鳍,胸鳍呈翼状,尾细且具尾刺。蝠鲼的身体部分扁平,呈菱形,具有一对尺寸较大而且运动较为灵活的近三角形的胸鳍。蝠鲼在运动过程中,胸鳍基部变形较小,而胸鳍远端因为不受身体的约束,会产生较大的变形,这种柔性变形是其推力产生的主要来源。蝠鲼的运动效率较大程度上依赖于胸鳍的柔性变形。蝠鲼在游动时,仅需拍动胸鳍即可实现矢量推进的效果,蝠鲼拥有如此高超的巡游能力离不开其独特的运动系统。蝠鲼除了具有高效的巡游能力之外,还具有较高的机动性,其具体表现为:低速巡游过程中的快速转弯、高速巡游过程中的悬停以及悬停过程中的原地翻转等。
一水下仿生扑翼机器人的驱动与样机研究
自然界中,牛鼻鲼、蝠鲼、鹰嘴鳐等的推进方式为摆动推进;黄貂鱼、尼罗河魔鬼、南美刀鱼等的推进方式为波动推进。相比于BCF模式,MPF模式具备更强的稳定性和机动性。随着仿生机器鱼领域研究的不断深入,MPF模式逐渐成为仿生机器鱼领域的研究热点。国内外很多研究机构根据MPF模式的运动特点陆续开发出多款仿生机器鱼。
⒈摆动推进的仿生胸鳍结构
2008年,德国FESTO公司、EvoLogics公司与柏林科技大学3家单位合作开发了一款名为AquaRay的仿蝠鲼机器鱼,如图1所示。该机器鱼采用无刷电机驱动的水泵为2对液压装置提供动力,并通过线绳驱动胸鳍骨架上下扑动。该机器鱼还在胸鳍结构中采用了FinRay结构,可以使仿生胸鳍的运动形态与真实生物更加贴合。利用位于鳍尖的单台舵机使胸鳍产生弦向扭转变形,从而产生推进力。同时,利用尾鳍实现上浮下潜运动。
该机器鱼可以实现以0.5m/s的速度进行游动。2010年,ZHOU等人开发了一款名为RoMan-II的仿蝠鲼机器鱼。该机器鱼采用多个独立电机驱动,并列两侧的胸鳍由3根独立的柔性鳍条驱动,每根鳍条都有单独的驱动源提供动力,机器鱼的升沉运动采用类似鱼鳔的给排水装置进行控制,可实现最大0.3m/s的水下巡游速度。2016年,CHEW等人研制了一款采用单鳍条驱动的仿生蝠鲼机器鱼。该机器鱼单侧胸鳍的展长为194mm,最大弦长为200mm,鳍条位于仿生胸鳍的最前端,鳍面其余部分为柔性橡胶材料。通过舵机驱动单鳍条使柔性鳍面变形进而为机器鱼提供推力。同时,研究人员还针对不同厚度柔性胸鳍的推进效果进行了实验研究,发现该机器鱼最快可以达到0.5m/s的游动速度,约为体长的1.78倍。 北京航空航天大学机器人研究所的毕树生等人自2007年起,做了大量MPF模式的仿生鱼研究,研制了五代样机(RoboRay系列),其中,游动速度最快可以达到0.9m/s。样机多采用多电机带动多鳍条的胸鳍结构形式,在运动形态和整体结构上,仿生机器人与自然界中真实蝠鲼的相似度已逐渐提高。2011年,国防科技大学杨少波等从仿生学层面系统地开展了牛鼻鲼胸鳍推进模式的研究,研究团队基于流固耦合的方法分析了牛鼻鲼胸鳍推进时的水动力学特性,并研制了一款名为CownoseRay的仿牛鼻鲼机器鱼,如图2所示。
团队通过样机的航行实验研究了不同的运动参数下潜水器的推进性能,该机器鱼可以在1Hz的扑动频率下以0.18m/s的速度游动。2022年,中国科学院的喻俊志等研制了一款后掠角可变的MPF仿蝠鲼机器鱼。该机器鱼展长723mm,最大弦长381mm,最大可以实现每秒1.07倍体长的游动速度,基于后掠角可变的胸鳍结构,该机器鱼的机动性得到了大幅的提升,可实现快速的俯仰机动,其半径为205mm。同时,研究团队针对该样机提出了基于准稳态方法的动力学模型。同年,洛桑联邦理工的SUN等通过多个齿轮泵构建了柔性致动器,可产生最大约25N·m的力矩,并在此基础上开发了一款胸鳍推进的仿生机器鱼。该样机展长1.93m,其扑动频率达到了0.5Hz,游动速度约0.29m/s。该机器鱼的驱动方式为设计工程实际中所需求的大尺度软体机器人提供了新的研究思路。西北工业大学的曹勇等采用单舵机驱动单根鳍条、多台舵机驱动并联多根鳍条、双驱动带动多连杆等结构方式开发了多台仿蝠鲼机器鱼,如图3所示。其研发的翼身融合水下滑翔工程样机完成了多次湖、海试验工作,并实现了最大1025m的下潜深度,是目前国内外唯一具备大深度水下工作能力的仿生潜水器。 根据以上列举的研究成果,可以发现,摆动推进的仿生机器鱼在航行性能以及与生物的相似程度在逐步提升,同时也逐渐从实验室研究阶段走向工程应用阶段,具备较好的应用前景。摆动推进的仿生机器鱼展弦比通常处于1~2之间,因此两侧胸鳍在存在推力差时,对于转弯机动性有较为明显的提升,尤其是在机器鱼处于低速巡游情况下。但摆动推进的机器鱼存在纵向稳定性差的问题,这主要是因为胸鳍扑动过程中产生的水动力是周期性变化的,这也对胸鳍驱动结构设计以及运动控制提出了新的挑战。
⒉波动推进的仿生胸鳍结构
HU等参照“尼罗河魔鬼”(Gymnarchus Niloticus)的长条状背鳍,开发了一款名为RoboGnilos的波动仿生鳍装置。该样机由并列排布的9台舵机驱动,每台舵机带动独立鳍条,鳍条间通过柔性薄膜进行连接,通过调节舵机之间的相位差可以实现柔性薄膜波动波长的调节,该装置可以达到约0.35m/s的游动速度。CURET等参照南美刀鱼的腹鳍,开发了一款名为Robotic Knifefish的仿生波动鳍装置。该装置由并列排布的32台舵机驱动,由于该装置驱动数目的增加,在运动过程中胸鳍可以产生连续性更好的行波。CURET利用DPIV方法,对装置的波动传递方式差异引起的涡结构、推力以及侧向力变化进行了分析。结果表明,该装置产生的最大射流速度可达0.5m/s、最大升力可达0.4N。 LIU等同样参照南美刀鱼的腹鳍,开发了一款可自主游动的仿生波动鳍机器鱼,如图4所示。该机器鱼采用单驱动形式,在波动鳍前缘,由一台连续转动的电机驱动曲柄摇杆机构往复运动,并带动柔性鳍面运动。由于该机器鱼仅在前缘进行驱动,鳍面的波动呈现由前缘至后缘振幅逐渐衰减的趋势。相较于多驱动结构的波动鳍装置,单驱动结构由于完全依赖鳍面的被动变形,因此不会产生额外的运动消耗,在推进能耗上有大幅下降,但逐渐衰减的波动振幅也限制了机器鱼推进能力的进一步提升。经测试,该机器鱼可达到约0.25m/s的游动速度。LIU等人开发了一款名为KnifeBot的仿生波动鳍机器鱼,该机器鱼可实现最大约0.35m/s的游动速度。该机器鱼由并列排布的16台舵机驱动,通过调节舵机相位差调节鳍面波长以及波动传递方向,其利用DPIV方法对该机器鱼的不同波动传递方式进行了研究,得益于该机器鱼的自主游动能力,除游动速度外,还可获得不同波长、扑动频率对俯仰角、横滚角、偏航角的影响规律。
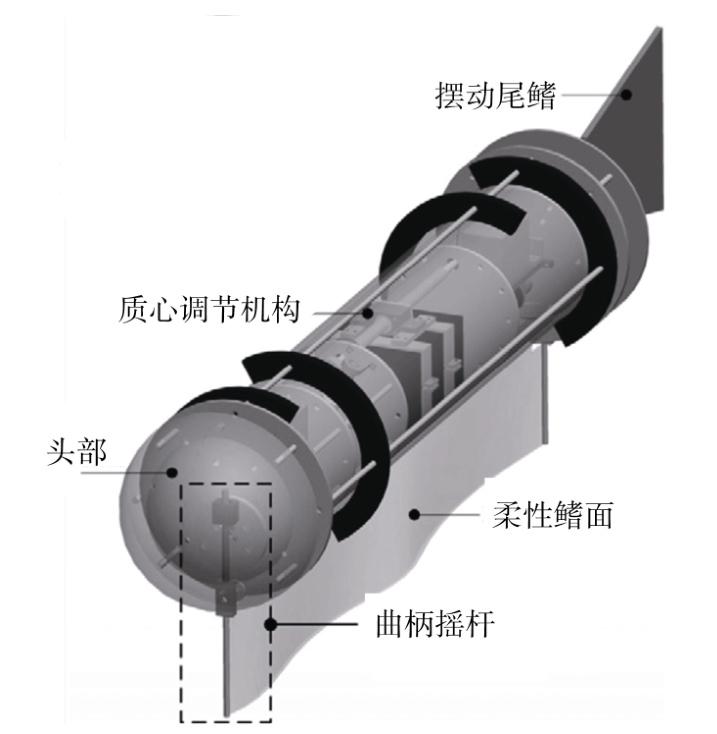
图4 仿刀鱼波动鳍机器鱼
国防科技大学与PliantEnergySystems公司分别开发了2款可实现水陆两栖的仿生波动鳍机器人,如图5所示。二者分别采用橡胶以及硅胶作为鳍面材料,其中,由于前者鳍面材料硬度更高,使得其可在水下、沙地、冰面以及雪地等多种地形条件下实现快速运动,后者爬行速度约为0.1m/s,游动速度为0.3m/s。
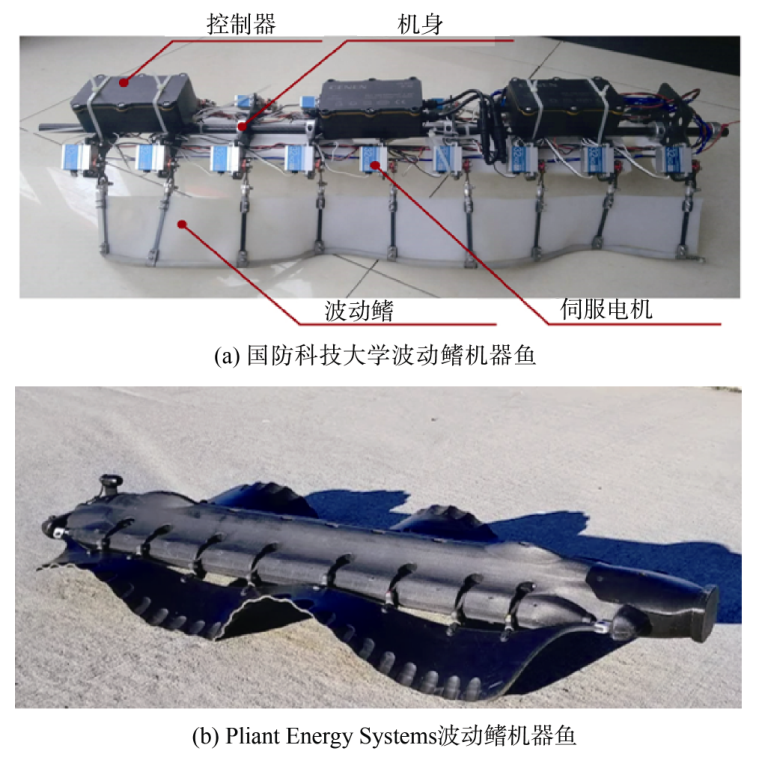
图5 水陆两栖仿生波动鳍机器鱼
根据以上列举的研究成果,可以发现,波动推进的仿生鱼逐渐脱离了仿生对象的束缚,从单波动鳍过渡到多波动鳍,并利用波动传递的特性,使波动鳍机器鱼具备了水–陆两栖的功能,具备较好的应用前景。波动推进的仿生机器鱼展弦比通常处于小于1,且鳍面存在的无量纲波数大于1,这就使得其产生的推力是连续的,因此也具备更好的稳定性。但波动推进机器鱼由于采用多个驱动装置,且驱动装置之间通过柔性材料连接,在运动过程中会存在运动和变形相互制约,相互影响的情况,因此功耗较高,对能源系统提出了新的挑战。
⒊采用软体驱动器的胸鳍推进机器鱼
软体驱动器是指全部或部分由柔性材料制成、能够实现连续变形的驱动器,相比于传统刚性驱动器,其具备极高的运动自由度和极强的环境适应性,还可实现自组装、自修复、自感知等功能,在胸鳍推进的仿生机器鱼领域有巨大的应用空间。已经研制的胸鳍推进式软体机器鱼所采用的驱动方式包括:气动、形状记忆合金(SMA)、离子聚合物–金属复合材料(IPMC)、介电弹性体驱动(DEA)和生物融合驱动。 气动指在软体结构中充入气体,通过改变气体体积或内部压力,使结构产生运动与变形的一种驱动方式。日本冈山大学SUZUMORI等及北京航空航天大学CAI等都先后研制了胸鳍推进的气动软体机器鱼。2022年,CHI等采用气动驱动并结合多稳态结构成功研制了胸鳍推进的蝶泳式机器鱼,游动速度可达每秒3.74倍体长,是目前世界上游动最快的软体机器鱼。气动具有驱动力强、运动灵活等优势;其发展较早且十分成熟,但通常需要外接气源,因此不适用于无缆的自主游动。 基于SMA材料驱动器的基本原理是:通过电流、光照等方式加热使SMA产生相变,同时产生变形。KIM等研发了一种基于SMA驱动的仿生海龟。WANG等[99]设计研究了一种基于SMA驱动的摆尾机器鱼和仿蝠鲼机器鱼。基于SMA的驱动器具有驱动力大、变形量大等优势;但由于其散热较慢,驱动后较长时间才能够恢复至初始状态,导致驱动频率较低。 IPMC是一种电活性聚合物材料(EAP)。在IPMC的电极两端施加电压时,水合阳离子在电场作用下移向负极,负极产生拉伸变形,同时,正极发生收缩变形,材料整体则发生弯曲变形。HUBBARD等将IPMC应用于仿生机器鱼胸鳍和尾鳍的驱动设计。SHEN等通过模仿海豚的游动方式,使用IPMC研发了一款仿生机器鱼,并研究了其水动力性能。弗吉尼亚大学的研究者基于IPMC驱动研发了一款仿生蝠鲼机器鱼,该机器鱼的胸鳍由两侧的IPMC鳍条驱动,身长80mm,翼展180mm,最大游动速度为4.2mm/s。IPMC具有变形灵活、位移大、驱动电压低、响应速度快等优点。由于其驱动需要液体环境,因此IPMC与机器鱼适配性强。但IPMC仍存在输出力度小、响应频率低等不足,在实现复杂运动和高效控制方面仍面临一些挑战。 以介电弹性体薄膜结构为例,可以对DEA的驱动原理进行简单说明:在介电弹性体薄膜上下两侧的电极上施加电压,介电弹性体薄膜在Maxwell应力的作用下发生变形,例如薄膜厚度减小,横向产生扩张等。近期,LI等研制了介电弹性体驱动的仿生狮子鱼,完成了马里亚纳海沟的深海驱动实验,并实现了全局视觉下软体机器鱼集群运动实验。介电弹性体驱动器具有极高的能量密度和良好的频率响应特性,在许多领域都有着广阔的应用前景。但由于其机理复杂,在设计仿生运动时仍有很大挑战。 生物融合驱动指:将生物材料如动物肌肉组织作为驱动器整合到软体机器人系统中,使其针对外界刺激(如电场、光刺激等)做出反应的一种驱动方式。2016年,PARK等利用大鼠心肌细胞研制了一种生物融合驱动的黄貂鱼机器人,所研制的机器人能够通过光趋近进行导航。2022年,ZHANG等成功研制了一种肌肉组织驱动的仿蝠鲼机器人,其仅由一块肌肉组织驱动就可以实现有效推进。生物融合驱动的生物兼容性强,能对外界刺激(光信号、电场等)做出反应,但其制备困难,对环境要求高,该领域的研究目前仍处于起始阶段。 除此之外,软体驱动还包括燃烧(化学驱动)、电液压驱动等驱动方式。其中,燃烧能够在短时间内爆发大量能量,但二次驱动效果差,在弹跳机器人、跨介质机器人领域应用广泛。针对软体机器鱼的设计而言,不难看出,化学驱动在快速逃逸、跃出水面等研究方向具备巨大潜力。2018年,ACOME等提出的HASEL驱动器(HASEL Actuator)是一类典型的电液压驱动器,能够实现拉伸、弯曲、旋转、扭转等多种运动及变形形式。其能量密度高、输出能力强、易于快速制备,在设计具备复杂仿生运动能力的胸鳍推进软体机器鱼方面具备广阔的前景。 根据以上所列举的研究成果,可以看出,大部分研究工作主要关注具体软体驱动机理,所研制的机器鱼样机运动形式单一、操控性差,难以实现复杂仿生运动。在扑翼软体机器鱼的研究过程中,还面临着许多挑战:例如,在驱动器层面,如何设计和研制能够满足胸鳍推进特性的软体驱动器;在系统层面,如何根据鱼类胸鳍运动变形特性,采用一种或多种软体驱动方式设计具备复杂仿生运动能力的仿生胸鳍推进系统;在运动控制层面,如何根据软体驱动器驱动特性设计运动控制系统,实现复杂仿生运动控制。总而言之,在运动效果和应用能力方面,与传统机器鱼相比,软体机器鱼仍有较大的提升空间。
二水下仿生扑翼机器人的控制研究
本节根据水下扑翼机器人的控制目标,将水下扑翼机器人的控制研究内容分为以下几大类:①扑翼驱动控制;②俯仰与深度控制;③转弯与航向控制;④路径点与路径跟踪;⑤避障与自主游动;⑥基于相似度的运动参数优化。针对以上研究内容,本节主要阐述面向不同控制任务的控制要求与难点,讨论不同控制器对同一控制目标的应用特点,为水下扑翼机器人的控制器设计提供参考。
⒈扑翼驱动控制
水下扑翼机器人的游动借助成对扑翼的拍动或波动,通过扑翼运动过程中与水的相互作用,推进自身游动。目前,扑翼驱动控制的方法要有基于运动学模型的方法、基于动力学模型的方法以及基于中央模式发生器(CPG)的方法等。 针对基于运动学模型的方法,LOW等利用模型的运动学方程,导出了2种形式的多链机器鱼步态规划的一般解,该解被用作六链体尾鳍式机器鱼、八链胸鳍式机器鱼游动试验的步态控制输入,实现了对RoMan-III两侧柔性胸鳍的驱动,实验表明其开环游动的最大速度为0.45m/s。WU等提出了一种基于连杆机构的新型仿蝠鲼机器人,作者对连杆机构的运动学模型进行了分析,并进行了仿生机器人的水下实验,其胸鳍的运动轨迹与蝠鲼胸鳍的运动轨迹相近。LIU等对仿蝠鲼机器人进行了运动学和水动力学的仿真分析,并在水池中进行了测试,该机器人能通过改变两侧胸鳍的幅值实现简单的横滚和俯仰运动,从而实现游动和转向。WANG等提出了一种基于波动式胸鳍的仿蝠鲼机器人,并对波动式胸鳍的运动学模型进行了分析,实现了前后游动、俯仰、转弯3个基本动作并进行了评价。 针对基于动力学模型的方法,CAI等、MENG等建立了仿生胸鳍的简化水动力学模型,测试了所设计的胸鳍机构及仿蝠鲼机器人的运动性能,但仿真结果与实验结果之间仍有明显的误差。目前,由于刚体与柔性耦合变形的水动力分析十分复杂,建立一个精确的胸鳍动力学模型是非常困难的。因此,基于动力学模型的驱动控制方法仍然较少。 基于目前的情况,更加稳定、可靠且无需节奏信号反馈的CPG方法开始被大量运用。CAI等开展了仿蝠鲼机器鱼的CPG多运动模态协调控制研究,进行胸尾鳍结构的驱动,实现了扑动前游、倒游、原地转弯等运动姿态;ZHANG等设计了一个CPG模型,实现了仿生机器鱼的多模态机动运动,实验表明利用胸尾鳍一体化推进机构,机器鱼可以更稳定、更高效地进行灵活的机动游动;CAO等改进了基于相位振荡器的CPG模型,引入了空间与时间上的非对称效应,完成了对多鳍条胸鳍结构的驱动,并进行实验测试了其运动性能。
⒉俯仰与深度控制
上浮与下潜2种运动状态是水下扑翼机器人完成深度控制的基础。水下扑翼机器人机械机构设计的差异会导致其实现2种运动的方式不同。例如,只拥有浮力系统的机器人可以在速度为零的情况下实现运动深度的改变,而只拥有重心调节机构的机器人则需要在机器人具备一定前游速度的基础上,通过调节重心位置改变俯仰力矩,进而改变俯仰角,最后实现运动深度的调节。同时,拥有可上下偏转的尾鳍的机器人也可以在具备一定的前游速度的基础下通过调节尾鳍的偏置角度改变运动的深度。当尾鳍向上偏置时,尾部受到的力会使得机器人产生抬头力矩,机器人呈现上浮运动状态,进而运动深度变小;当尾鳍向下偏置时,尾部受到的力会使得机器人产生低头力矩,机器人呈现下潜运动状态,进而运动深度变大。
由于尾鳍具有不占用额外的舱内空间、且结构设计相对简单的优点,因此在进行水下扑翼机器人设计时,小尺寸样机通常只包含尾鳍机构,而大尺寸样机通常同时包含重心调节机构与浮力系统。 针对水下扑翼机器人深度控制,研究人员以尽量快速的按照平滑轨迹到达某一固定深度,并保持在这一深度游动为目标开展了相关研究。NIU等通过调节尾鳍的偏转角度,采用基于模糊逻辑的方法实现了机器人的深度控制,并通过实验验证了基于模糊逻辑的深度控制方法的有效性;WANG等通过实验研究了“RobCutt-I”的运动速度与波形传动的运动学参数之间的关系,包括向前/向后游泳、潜水/上升和转弯3个运动状态,在此基础上提出了将自抗扰控制(ADRC)与模糊策略相结合的混合控制,以实现深度和航向的闭环控制;德国EvoLogicsGmbH公司与吕贝克应用科学大学研制的MantaRayAUV包括2个喷气发动机、4个垂直推进器、2个机翼伺服系统、2个扭转机翼伺服系统和1个尾部伺服系统,这种配置使得它具备动态深度控制能力,可以实现高精度的深度保持控制,同时具备迅速完成潜水或爬升动作的能力;CAO等设计了一种仿牛鼻鲼机器人Robo-ray,通过2个尾鳍来实现该机器人的控制深度,基于CPG-模糊算法提出了开环速度控制、闭环深度控制和航向控制方法。闭环实验结果表明,机器人的深度控制误差小于6.1cm,航向控制误差小于6°;XIE等考虑到未知的动力学和外部环境干扰,设计了一个基于CPG的经典高木–关野(Takagi-Sugeno,T-S)模糊神经网络控制器用于仿蝠鲼机器人的航向和深度控制,并通过水池测试验证了控制器的有效性,其深度跟踪和航向跟踪控制误差分别为±6cm和±6°;HE等为了提高仿蝠鲼机器人的深度跟踪能力,考虑仿蝠鲼机器人的纵向运动特性,设计了一个基于非对称输出S平面的深度控制器。最后,通过水池实验验证了仿蝠鲼机器人深度控制器的可行性和可靠性。实验结果表明,深度控制误差在±5cm以内。
⒊转弯与航向控制
水下扑翼机器人的扑翼在扑动过程中的波动,可以简单地分解为弦向的波动和展向的波动。水下扑翼机器人主要通过3种方式进行转弯:两侧非对称振幅方式和两侧鳍条间非对称弦向相位差方式,以及非对称振幅和非对称相位差结合的方式。 基于非对称振幅的转弯方式,一侧扑翼的扑动振幅大于另一侧,扑动振幅较大的一侧产生更大的推进力,导致两侧扑翼的推进力不同,形成转弯力矩,从而使机器人转向振幅小的或无拍动振幅的一侧,实现航向的调整。基于非对称振幅的转弯模式具有较慢的转弯角速度和较大的转弯半径,因此该方法适用于小范围内的航向调整。 基于非对称相位差的转弯方式,扑翼的波动传递方向或快慢不同,因此两侧扑翼的推进力大小不同,形成一个大的转弯力矩。该转弯方式主要用于快速响应时的机动转向。因此,基于非对称相位差的转弯模式适用于转弯角速度快、转弯半径小的大航向调整。 航向控制的主要任务是通过调节两侧胸鳍非对称振幅及相位差,使机器人的实际航向趋近于期望航向。
基于上述目标,WANG等提出了一种ADRC与模糊控制策略相结合的混合控制方法来进行航向控制,该方法在实验样机RobCutt-I、RobCutt-II上进行了实验,设定航向从70°调整到210°,稳定时间约为12s,且超调量较小。针对单一依靠非对称振幅及相位差进行航向调整存在的问题,HAO等结合2种转弯方式的特点,利用非对称相位差快速调整航向,利用非对称振幅精确调整航向,实现了闭环航向控制。通过航向干扰实验,验证了2种转弯方式结合比单一方式更有效,并通过矩形轨迹游动实验验证了该机器人在2种转弯方式结合下的机动性。此外,非对称振幅可以提前改变预期的相位差,确保输出的平稳过渡,实现快速准确的调整。针对上述航向控制方法精度不高的问题,XIE等提出了一种将CPG和基于T-S模糊神经网络(NN)的控制相结合的控制方案,该方法基于实验数据构建航向数据集,并使用相应的数据集完成对所建立的T-S模糊神经网络的训练,提出了基于CPG网络的航向控制器,其中参数由T-S神经网络获取,最后,实验结果表明该仿蝠鲼机器人的航向控制误差为±6°,航向控制精度有所提高,验证了该控制器的有效性和鲁棒性。 HE等以仿蝠鲼机器人在航向角变化较大的情况下实现良好的航向跟踪效果为目标,结合模糊控制器和航向过渡目标值函数,基于S平面控制方法设计了仿蝠鲼机器人的航向控制器,最后,通过水池实验验证了蝠鲼机器人航向控制器的可行性和可靠性。实验结果表明,航向控制误差在±5°以内,与经典S面航向控制器相比,改进S面航向控制器的超调量较小,且航向切换后的误差较小。
⒋路径点与路径跟踪
根据不同的控制目标,跟踪问题可分为路径点跟踪和路径跟踪。路径点跟踪的含义为机器人经过一系列给定的路径点游动,路径跟踪的含义为机器人按照制定的最优几何参考路径游动。 在运用路径规划算法规划好一条从起点到目标点的最优路径后,机器人从起点出发,按照某种控制规律进行运动,到达该最优路径并实现对其的跟踪。如何让机器人跟踪该最优路径,是路径跟踪需解决的关键问题。路径跟踪的实质是通过控制水下机器人的运动来减少机器人与参考轨迹之间的空间误差。若考虑轨迹跟踪,则需包含时间上的误差。然而,水下扑翼机器人的模型不确定性和来自波浪和水流等环境的干扰在很大程度上影响着机器人的运动控制性能,进而影响跟踪精度。 针对上述路径点跟踪问题,BI等提出了一种路径点跟踪控制系统,该系统包括2层:速度控制层和航向控制层。速度控制层基于实验样机与路径点的距离调节机器人的最大扑动振幅,航向控制层采用模糊控制方法来获得转向运动的转向因子。 为了验证控制系统的有效性,进行了路径点跟踪实验,实验结果表明,在任意设置路径点或随机给定路径点的情况下,实验样机均能自主游动到达目标区域;WANG等提出了基于有限状态机(FSM)的视线(LOS)制导系统的路径点跟踪方法,基于RobCutt-I实现了6个路径点的跟踪。 针对上述路径跟踪问题,WANG等提出了一种用于三维点跟踪的切换控制方法,并设计了一个模拟实际水下作业过程的实验。实验结果表明,RobCutt-II能够跟随参考路径,且最大交叉轨迹误差为0.1m。随后,在该方法的基础上进行改进,提出了一种将视觉系统与反步控制相结合的路径跟踪方法。仿真和实验结果表明,RobCutt-II能够在水下空间中自主地沿着直线和圆形路径游动。此外,与传统比例–积分–微分(PID)方法相比,该方法减小了轨迹交叉误差,轨迹跟踪效果更加理想。同时,由于采用了航向补偿,该方法具有较强的抗干扰能力。
⒌避障与自主游动
水下扑翼机器人的高机动性使它们能够在复杂和狭窄的环境中工作。同时,自主工作的前提条件是机器人能够自主检测和避开障碍物。目前,水下扑翼机器人大多采用红外传感器、超声波、摄像头进行障碍物的检测。ZHANG等综合昆虫翅膀和鱼鳍的优点开发了一款仿生机器鱼,其头部安装了3个对前的红外传感器,包括上前、中前、下前3个方向,利用3个红外传感器的信息作为CPG网络的反馈,机器人可以通过改变步态或动作来避开障碍物,实现自主游动。Festo公司仿生学团队设计Bionic FinWave的灵感来自于波浪状鳍鱼类的运动,该自主水下机器人能够与外界进行无线通信,并将传感器记录的温度和压力值等数据传输到电脑上。此外,机器人前部还装有压力传感器和超声波传感器以不断地测量其与障碍物之间的距离,从而防止其与障碍物发生碰撞。 XIE等针对仿蝠鲼机器人自主游动的问题,在利用胸鳍相位差进行左右转的基础上引入饱和函数,使得机器人能够根据障碍物的距离改变转弯的速度。YANG等针对已知结构化环境下的绕池壁自主游动问题,采用基于CPG、模糊控制与策略的控制方法,完成了仿蝠鲼机器人的水池绕壁自主游动。
⒍基于相似度的运动参数优化
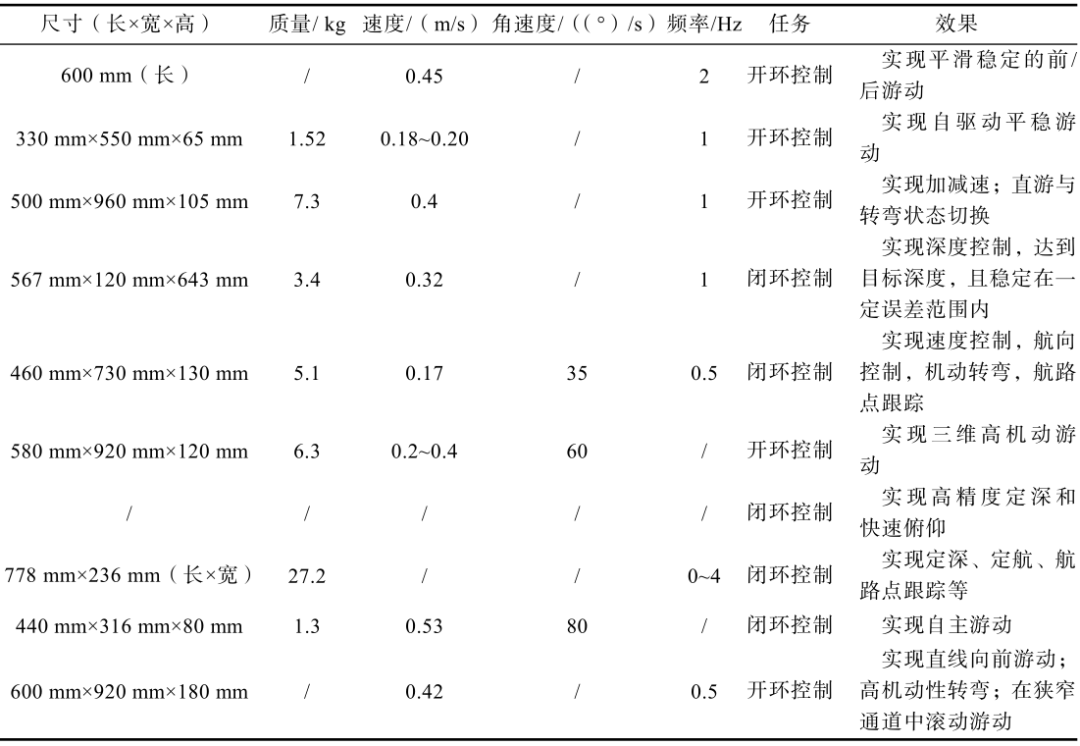
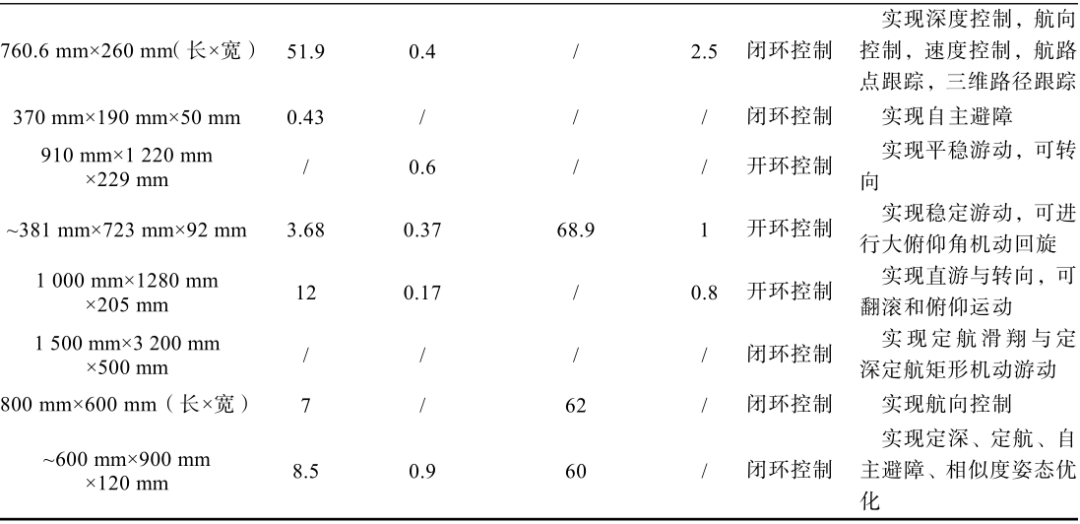
随着水下扑翼机器人研究的深入,机器人在模仿真实生物时的重点由“形似”逐渐过渡到追求“神似”。通过提高仿真度,可以显著提升仿生机器人的稳定性、机动性和游动效率。为了解决如何提高机器人运动姿态仿生相似度的问题,亟需建立基于仿生水下机器人的相似度评价体系,有效改善仿生机器人的运动特征和控制策略,进行机器人的运动相似度参数优化。 基于上述问题,MA等通过特征点轨迹提取和动态时间归整(DTW)算法建立了运动姿态的相似度评价规则。通过引入偏置方程和时间非对称系数,建立了表征蝠鲼胸鳍运动时间和空间非对称性的相位振荡器模型,构造了基于相位振荡器的CPG拓扑网络。在此基础上,建立了运动姿态相似度的适应函数,并提出了CPG网络参数的遗传粒子群优化算法,通过水池实验验证了基于相似度优化运动参数优化的控制的有效性。实验结果表明,优化后的仿蝠鲼机器人前游运动姿态与蝠鲼的相似度提高到88.53%;随后,该团队研究了仿蝠鲼机器人胸鳍鳍条相位差变化的优化方法,以输出信号的平滑性和快速性为优化目标,采用非支配排序遗传算法(NSAG-II)对CPG参数进行优化,得到最优参数组合。仿真和实验结果验证了优化后的CPG控制器输出信号在相位切换过程中能够平稳、快速地转换。水下仿生扑翼机器人近年来发展情况如表1所示。
表1 水下仿生扑翼机器人近15年发展情况概述
综上所述,基于CPG模型的方法被越来越多地使用到水下仿生扑翼机器人的胸鳍驱动上,该模型能够在简单的激励输入下模拟复杂的节律信号,具有很强的环境适应性,将传感器信息耦合进CPG模型是水下仿生扑翼机器人扑翼驱动控制研究的新方向。在此基础上,研究人员针对水下扑翼机器人的深度与航向控制问题,基于传感器反馈采取合适的控制策略或无模型控制方法,通过改变水下扑翼机器人的俯仰与转弯状态实现深度与航向调节,从而实现深度与航向的控制。进一步地,水下扑翼机器人的路径跟踪与自主游动还需考虑机器人动力学模型的非线性与环境的不确定性,因此目前的研究成果多集中于单平面内的路径跟踪,而三维空间内的跟踪问题仍处于初始阶段。另一方面,仿生相似度评价方法的研究主要集中在仿生陆地生物和仿生机器人,对于运动机构具有明显的主被动变形的水下扑翼机器人,完整的相似度评价体系还有待建立,且基于仿生相似度的运动姿态优化也存在较大的研究空间。 未来,水下仿生扑翼机器人的多载荷应用、任务规划与执行将是其成为海洋重要装备的关键,其所涉及控制问题也值得研究人员去探索。
三水下仿生扑翼机器人集群
与常规推进方式相比,鱼类游动具有更高的效率、机动性、生物亲和性和隐蔽性。近些年来,仿生集群逐渐成为水下机器人领域的一个研究热点。 STEVENS等对蝠鲼种群进行了长达数十年的个体记录与行为观察,详细阐明了蝠鲼个体与群体行为特征,根据蝠鲼的个体数量与运动类型,总结了蝠鲼个体与群体捕食策略,对于了解蝠鲼个体与群体行为特性提供了重要依据。 GAO等和MA等采用数值模拟的方法研究了串联、并排与垂直队形下距离与攻角对蝠鲼个体与整体滑翔水动力性能的影响。从阻力性能方面,双蝠鲼的串联与并排队形可以显著降低整体阻力;垂直滑翔中,随着攻角的变化,个体获得阻力交替减小的效果。在升力性能方面,无论何种排列方式,滑翔时的整体升力与单体升力基本相同。 国内外一些机构针对仿蝠鲼机器人的集群控制开展了相关研究。德国EvoLogics公司研发了BOSS-MantaRay,搭载多型传感器,技术成熟度较高。采用水声通信方式,实现了3台以上BOSS-Manta水下组网与集群,如图6所示,具备水文信息剖面测量、海底绘图、协同监测和搜索等作业能力。
2021年,浙江大学设计了由介电弹性体和伺服电机混合动力驱动的软体蝠鲼机器鱼,并提出了一种基于全局视觉定位的机器人集群系统,实现了对自然界生物平行、围捕和环绕3种典型的群集行为的模仿。2022年,北京大学喻俊志团队提出了一种基于视觉的仿蝠鲼机器人水下跟踪方案,采用基于颜色的水下目标识别与定位方法,解决了机器人距离控制与方位控制耦合的问题,并通过水下实验验证了跟踪方案的有效性和鲁棒性。2023年,西北工业大学将仿蝠鲼机器人的跟随问题转变为导引问题。基于鱼群行为启发,制定了基于跟随区域划分的群游跟随导引策略,利用水下动作捕捉系统实现了仿蝠鲼机器人的跟随游动控制,如图7所示。 由于水下环境对感知和移动带来了巨大挑战,传统的地面通信方法(如无线电)在水下表现不佳,而GPS等定位方法不可用。同时,水下移动面临速度与加速限制等问题。目前,水下仿生扑翼机器人集群研究仍处于初始阶段。
编辑:黄飞
- 相关推荐
- 热点推荐
- 机器人
-
水下机器人及仿生传感器现状2022-04-21 11666
-
水下机器人便携式遥控单元设计2011-03-08 10054
-
瑞士水下仿生机器人-Sepios2015-01-13 6880
-
什么是龙人四足机器人?2016-03-24 9096
-
四足仿生机器人2016-08-19 6481
-
各种炫酷的仿生机器人2016-08-24 19821
-
【BeagleBone Black申请】水下智能机器人2017-07-04 3308
-
开源资料六足仿生机器人(原理图+PCB+源码等)2020-10-10 11051
-
仿生机器人开源资料(原理图+源码+论文)2020-10-13 6913
-
四足机器人的机构设计2021-09-15 2161
-
水下机器人制作需要实现哪些功能呢2022-01-11 1367
-
仿生扑翼飞行机器人研究中若干问题的思考2009-08-10 939
-
仿生飞鸟机器人嵌入式控制器及地面测控系统研究2018-01-31 953
-
仿生机器人分为哪几类_仿生机器人研究现状2020-12-14 14465
-
高压放大器在水下扑翼软体机器人研究中的应用2024-12-04 1079
全部0条评论

快来发表一下你的评论吧 !
