

机载雷达空时自适应处理技术
RF/无线
描述
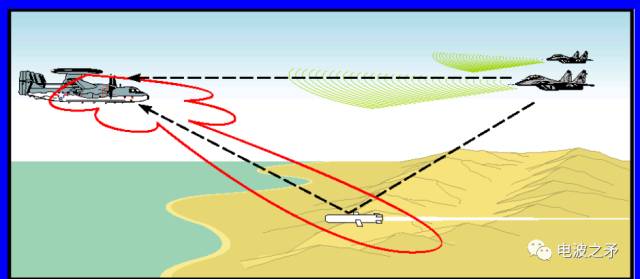
机载雷达信号环镜
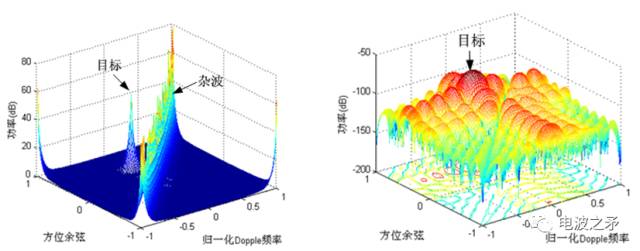
机载雷达面临着严重的地(海)杂波,由于杂波强度大,分布范围广,并且由于载机的运动,雷达杂波频谱存在展宽。因此,杂波的抑制是机载雷达的关键技术难题。传统的机载雷达杂波抑制方法仅在时/频域处理,难以有效抑制杂波,导致小目标无法检测。因此,亟需发展新理论、新技术来解决机载雷达的杂波抑制难题。
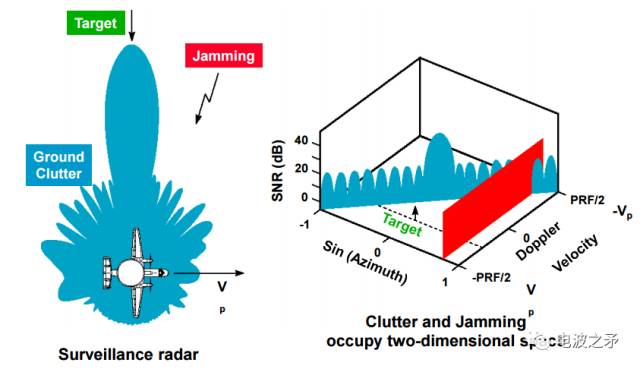
机载雷达的信号分布
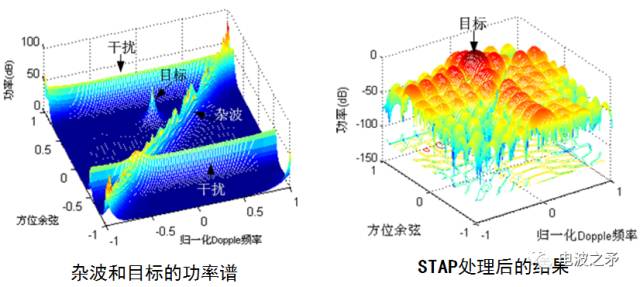
由于机载雷达的地物杂波呈现为空时二维耦合谱特性,这就决定了机载雷达杂波抑制基本属于空时二维滤波问题,而且,其二维处理需实时自适应实现,即杂波抑制需使用空时二维自适应处理(STAP)。自适应处理既可实现与复杂外界环境的有效匹配,同时又可在一定程度上补偿系统误差的影响,因而可大大改善系统的性能口但自适应处理往往需要系统能灵活形成多波束和在线实时计算自适应权,从而涉及较大的运算量。数字波束形成(DBF)技术及超大规模集成电路(VLSI)的迅速发展,为精确控制空时自适应权值和加快处理速度提供了保障,从而为空时二维自适应处理的实际应用提供了有利条件。
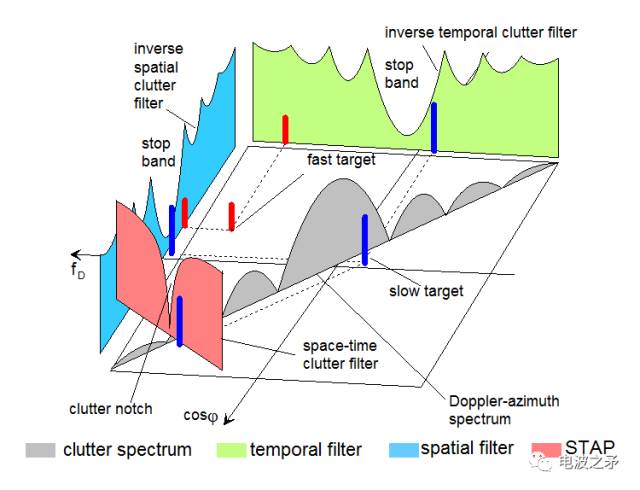
空域、时域和空时二维滤波的对比
发展历程
空时自适应处理技术,是空域自适应技术的发展。二十世纪60年代末, Van,Atta等人提出了空域自适应的思想用来抑制空域杂波和干扰。1973年,Brennan首次提出了空时二维自适应处理的概念,将阵列信号自适应处理的基本思想由阵元信号推广到脉冲和阵元采样的二维数据场中,
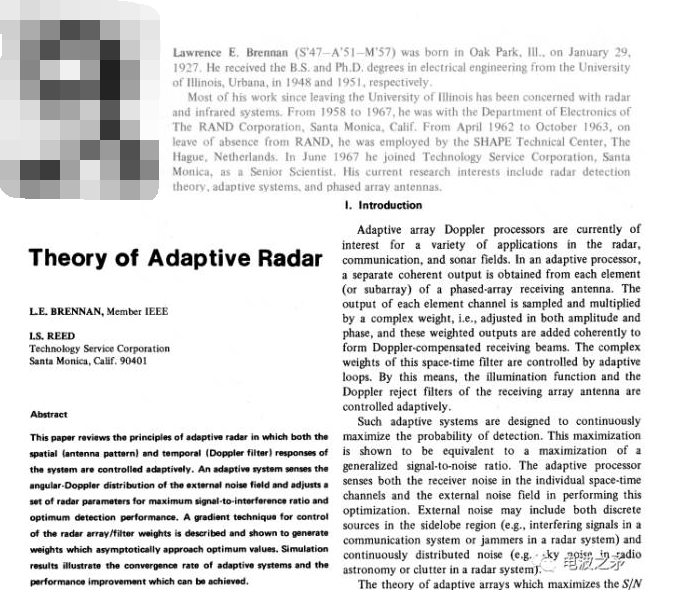
由于STAP的运算量极大,实时处理几乎不可能实现。因此这之后的多年中几乎无人跟进开展研究。直到20世纪80年代初期,Klemm博士提出了辅助通道法(ACR)降维,使工程实现成为可能,从而掀起研究的热潮。保铮院士是国内研究STAP的先驱,其后涌现出如王永良院士、廖桂生教授等。
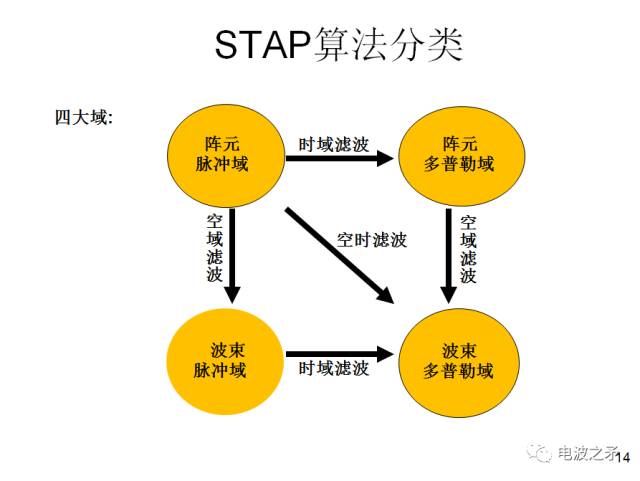
目前STAP处理的算法N中,主要可分为以下四类:
关于STAP最有名的报告为J Ward 的Space-Time Adaptive Processing for Airborne Radar,该报告目前引用次数为1215次。
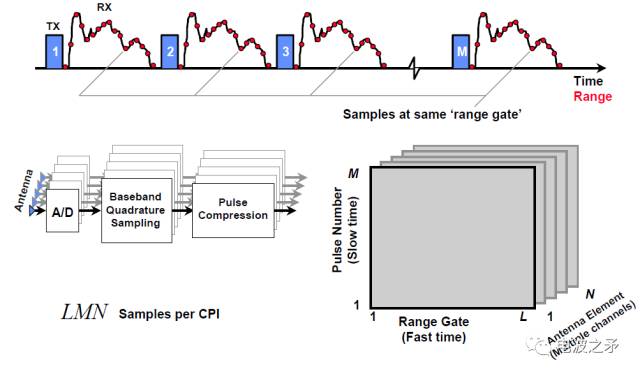
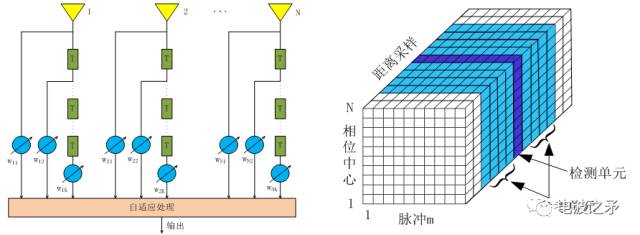
STAP的基本原理
阵列天线在一个CPI时间内利用天线阵同时处理空间和时间二维数据,在噪声和杂波环境中检测并定位目标信号。空间数据来源于阵列的一系列天线单元,时间数据来源于相干处理时间内的一系列脉冲串。N个天线单元,M个脉冲串,L个距离环的数据形成了三维数据立方体。三维数据立方体中包含了所有目标信号,杂波,干扰和噪声信息。从每个距离门接收到的数据被归入一张快照,连续的距离门数据就累积成为一个数据立方体。我们用数据立方体来查询各个距离门是否存在目标信号。而自适应的二维波束形成保证每个距离门的信噪比最大。
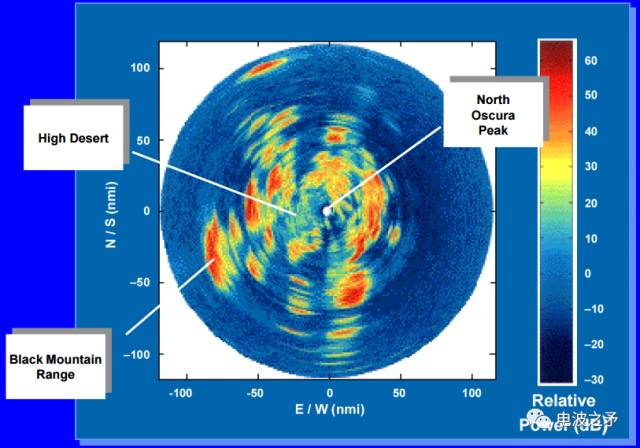
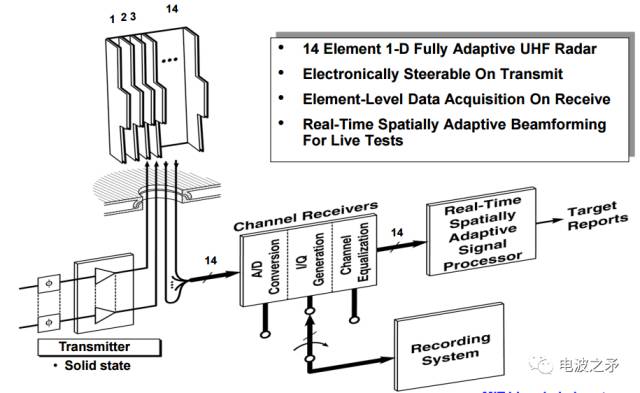
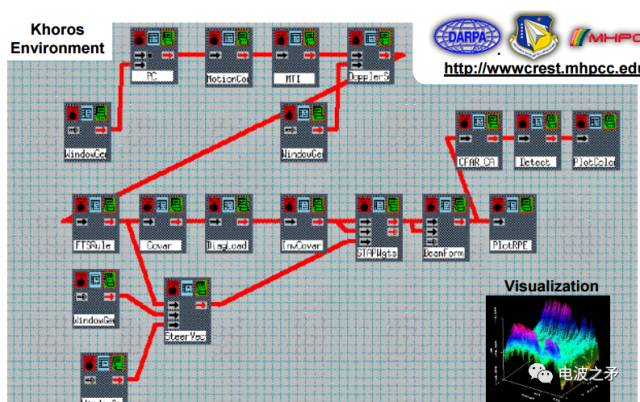
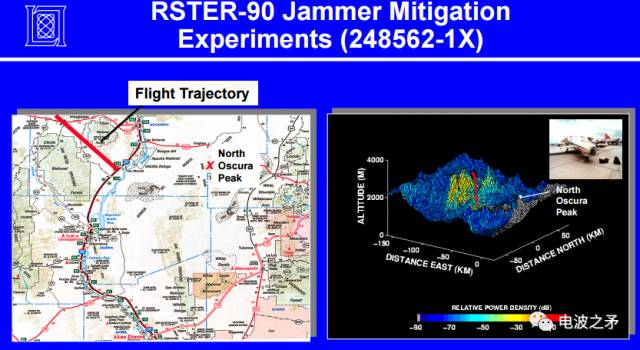
国外著名的项目Mountain Top计划简介
STAP实验系统主要有:Mountain Top计划;MCARM计划;MIT林肯实验室的KASSPER计划将各种先验知识融合到传统的STAP算法中;南加州大学在 IBM 公司的SP2、Cray公司的T3D和Intel公司的Paragon等多种大规模并行机上,实现了STAP并行算法;另外,国内西安电子科技大学,清华大学,国防科技大学,中国科学院等单位在STAP实验方面也做了很多工作和努力。
上世纪90年代,美国空军与Advanced Research Projects Agency(ARPA)签署协议,由ARPA出面牵头实施了Mountain Top计划,旨在对下一代机载早期预警雷达中应用的先进信号处理及其它相关技术进行预研。该计划在墨西哥州的白沙导弹试验区和夏威夷的太平洋导弹试验区的几个山峰的山顶安装了几部试验雷达。1993年前后,在新墨西哥州的白沙实验区以及夏威夷的太平洋试验区采集了一批数据。
编辑:黄飞
-
毫米波雷达的自适应波束成形技术:提升感知精度的前沿探索2023-11-14 1730
-
[9.3.1]--9.3空时自适应处理基本原理jf_75936199 2023-02-01
-
机载雷达的双站空时自适应处理技术分析2022-11-04 1056
-
基于红外摄像技术的自适应远光灯控制系统2022-03-25 4549
-
机载雷达面临哪些技术难题?机载雷达的信号是如何分布的?2021-06-21 2713
-
机载雷达空时自适应处理技术的研究资料说明2020-12-31 1314
-
双向同步自适应时钟技术2019-05-21 2339
-
基于无源传感器协同的机载雷达自适应辐射控制算法_戴春亮2017-01-08 948
-
雷达信号处理基础_部分12016-04-05 1490
-
机载相控阵雷达STAP原理及其干扰方法2012-08-29 2827
-
变步长LMS自适应滤波算法及其分析2010-04-26 3696
-
降维空时自适应处理研究2009-12-18 786
-
基于图像特征的机载正交雷达网空时处理算法2009-11-18 744
全部0条评论

快来发表一下你的评论吧 !
