

步进电机S曲线运动的代码实现
电子说
1.4w人已加入
描述
摘要:本节介绍实现步进电机S曲线运动的代码
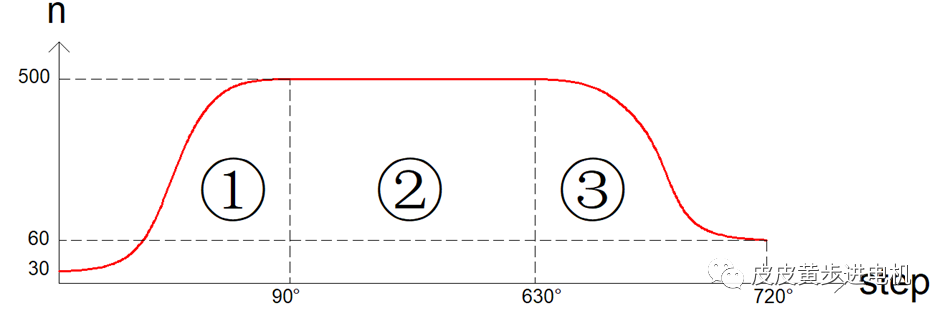
一、目标功能
实现步进电机转动总角度720°,其中加减速各90°
加速段:加速类型:S曲线
加速角度:角度为90°
起步速度:30RPM,
终止速度:500RPM
匀速段:匀速角度:角度为540°
匀速速度:500RPM
减速段:减速类型:S曲线
减速角度:角度为90°
起步速度:500RPM
终止速度:60RPM
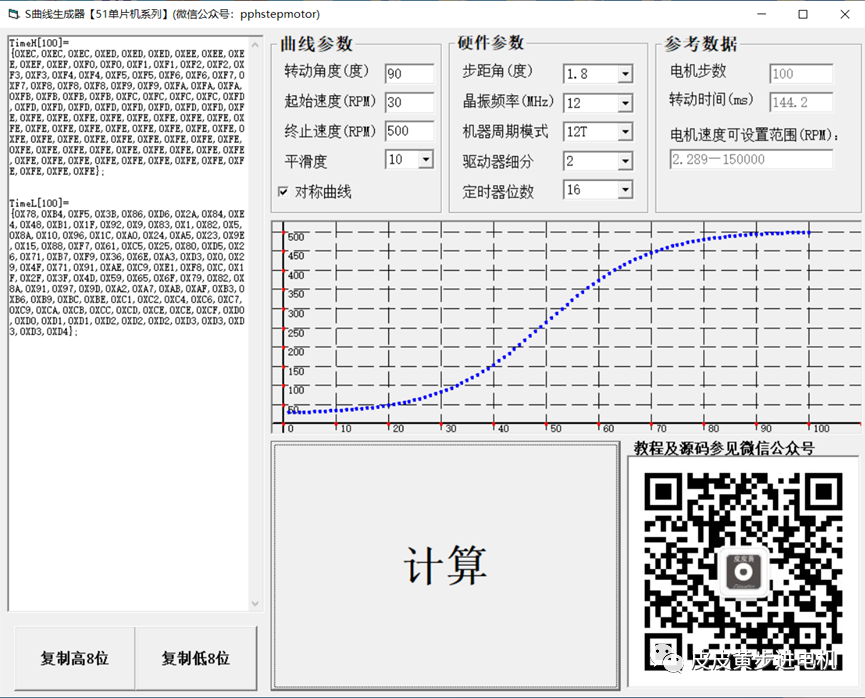
二、生成器计算
加速参数计算
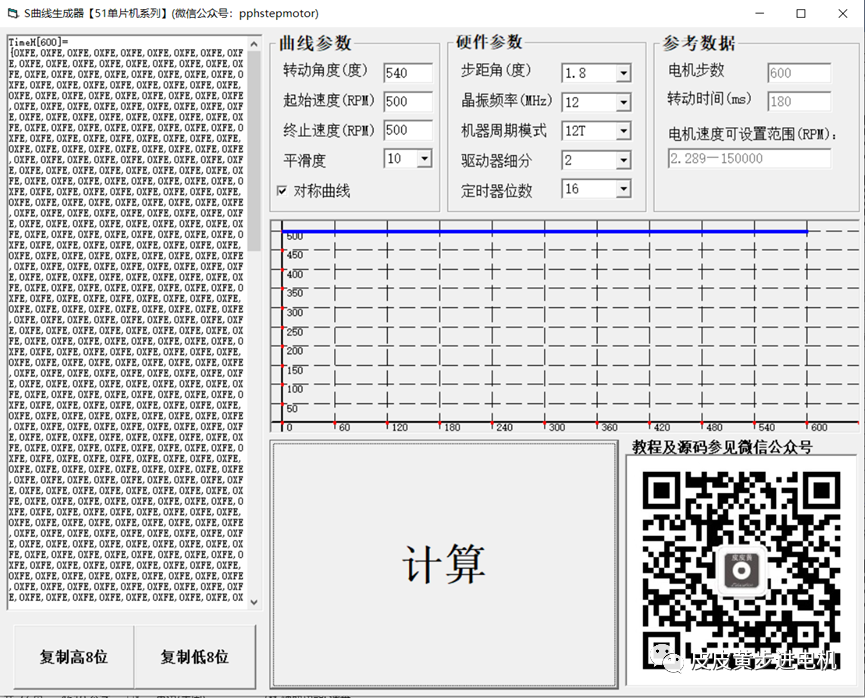
匀速参数计算,主要计算电机步数
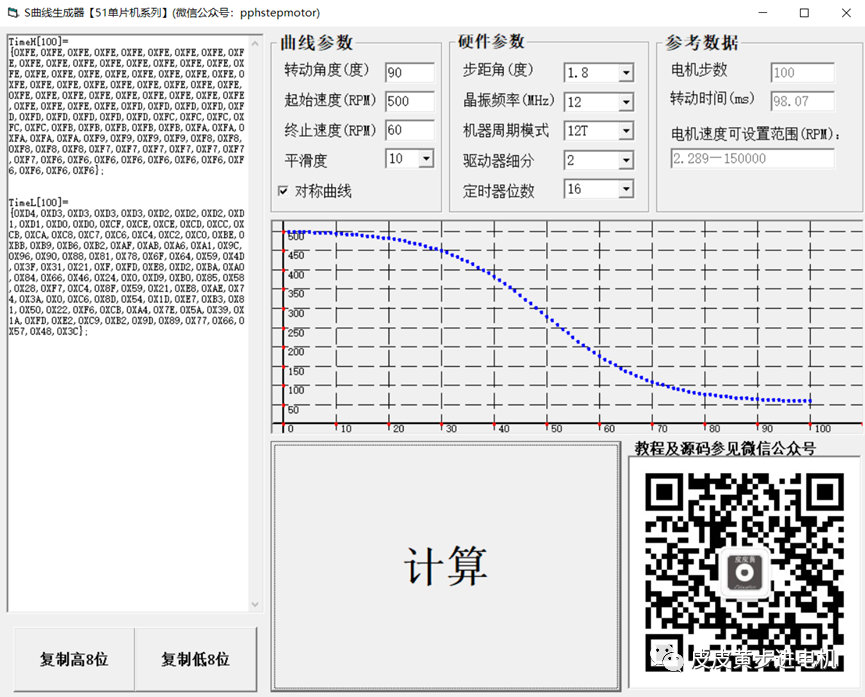
减速参数计算
三、程序代码
//加速、匀速、减速步数#define step0 100#define step1 600#define step2 100unsigned int n=0;//步数计数变量unsigned int flag=0;//标志位,0:加速段 1:匀速段 2:减速段//加速段90°,30RPM-500RPMconst unsigned char codeTimeH0[100]={0XEC,0XEC,0XEC,0XED,0XED,0XED,0XEE,0XEE,0XEE,0XEF,0XEF,0XF0,0XF0,0XF1,0XF1,0XF2,0XF2,0XF3,0XF3,0XF4,0XF4,0XF5,0XF5,0XF6,0XF6,0XF7,0XF7,0XF8,0XF8,0XF8,0XF9,0XF9,0XFA,0XFA,0XFA,0XFB,0XFB,0XFB,0XFB,0XFC,0XFC,0XFC,0XFC,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE};const unsigned char codeTimeL0[100]={0X78,0XB4,0XF5,0X3B,0X86,0XD6,0X2A,0X84,0XE4,0X48,0XB1,0X1F,0X92,0X9,0X83,0X1,0X82,0X5,0X8A,0X10,0X96,0X1C,0XA0,0X24,0XA5,0X23,0X9E,0X15,0X88,0XF7,0X61,0XC5,0X25,0X80,0XD5,0X26,0X71,0XB7,0XF9,0X36,0X6E,0XA3,0XD3,0X0,0X29,0X4F,0X71,0X91,0XAE,0XC9,0XE1,0XF8,0XC,0X1F,0X2F,0X3F,0X4D,0X59,0X65,0X6F,0X79,0X82,0X8A,0X91,0X97,0X9D,0XA2,0XA7,0XAB,0XAF,0XB3,0XB6,0XB9,0XBC,0XBE,0XC1,0XC2,0XC4,0XC6,0XC7,0XC9,0XCA,0XCB,0XCC,0XCD,0XCE,0XCE,0XCF,0XD0,0XD0,0XD1,0XD1,0XD2,0XD2,0XD2,0XD3,0XD3,0XD3,0XD3,0XD4};//减速段90°,500RPM-60RPMconst unsigned char code TimeH2[100]={0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFC,0XFC,0XFC,0XFC,0XFC,0XFB,0XFB,0XFB,0XFB,0XFB,0XFA,0XFA,0XFA,0XFA,0XFA,0XF9,0XF9,0XF9,0XF9,0XF8,0XF8,0XF8,0XF8,0XF8,0XF7,0XF7,0XF7,0XF7,0XF7,0XF7,0XF7,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6};const unsigned char codeTimeL2[100]={0XD4,0XD3,0XD3,0XD3,0XD3,0XD2,0XD2,0XD2,0XD1,0XD1,0XD0,0XD0,0XCF,0XCE,0XCE,0XCD,0XCC,0XCB,0XCA,0XC8,0XC7,0XC6,0XC4,0XC2,0XC0,0XBE,0XBB,0XB9,0XB6,0XB2,0XAF,0XAB,0XA6,0XA1,0X9C,0X96,0X90,0X88,0X81,0X78,0X6F,0X64,0X59,0X4D,0X3F,0X31,0X21,0XF,0XFD,0XE8,0XD2,0XBA,0XA0,0X84,0X66,0X46,0X24,0X0,0XD9,0XB0,0X85,0X58,0X28,0XF7,0XC4,0X8F,0X59,0X21,0XE8,0XAE,0X74,0X3A,0X0,0XC6,0X8D,0X54,0X1D,0XE7,0XB3,0X81,0X50,0X22,0XF6,0XCB,0XA4,0X7E,0X5A,0X39,0X1A,0XFD,0XE2,0XC9,0XB2,0X9D,0X89,0X77,0X66,0X57,0X48,0X3C}; void main(){ while(1) { }}//定时器0中断程序void time0_int() interrupt 1{ //产生一个脉冲 PUL=1; _nop_();_nop_();nop_();nop_(); PUL=0; n++;//步数加1 switch (flag)//判断运动状态 { case0://加速段 { if(n==step0)//加速段完成 { n=0; flag=1; TH0=TimeH2[0];//装载定时寄存器匀速段初值 TL0=TimeL2[0]; } else { TH0=TimeH0[n];//装载定时寄存器加速段初值 TL0=TimeL0[n]; } }break; case1://匀速段 { TH0=TimeH2[0];//装载定时寄存器匀速段初值 TL0=TimeL2[0]; if(n==step1)//匀速段完成 { n=0; flag=2; TH0=TimeH2[n];//装载定时寄存器减速段初值 TL0=TimeL2[n]; } }break; case 2://减速段 { if(n==step2)//减速段完成 { n=0; flag=0; TR0=0; //电机停止 } else { TH0=TimeH2[n];//装载定时寄存器减速段初值 TL0=TimeL2[n]; } }break; default: break; }}
四.总结
通过上述计算,完成S曲线加减速运动。通过调整匀速运动的角度,加减速过程不变,可以实现总转动角度的变化,适用于总转角需要变化且需要较高速度的情况,并且满足总转角应大于加减速转角之和。
对于大多数情况,加减速的过程可以合并,即用S加速的逆过程去实现减速,可以实现代码的简化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
TMC4361A:实现步进电机S形曲线高速平稳运行!2026-02-05 613
-
步进电机S曲线生成器的计算以及使用2023-10-26 4782
-
如何使用脉冲加方向方式对步进电机进行位置的自由控制2022-10-14 5762
-
步进电机S型曲线加速的实现2021-11-25 2317
-
怎么实现步进电机S型曲线加减速算法?2021-10-12 2634
-
怎样去生成步进电机S曲线运动数组代码程序语言2021-07-08 816
-
STM32步进电机S曲线加速的源代码资料免费下载2019-04-28 1992
-
如何使用S曲线进行步进电机加减速的控制设计资料说明2019-03-13 2363
-
步进电机s曲线驱动源码下载2017-08-31 1437
-
有没有stm32,l6205驱动步进电机pid或者s曲线动态计算的实现代码,求上传!!!!!2016-12-20 4364
-
基于S曲线的步进电机加减速的控制2016-05-03 966
-
步进电机加减速曲线(S型)2016-01-19 2028
-
基于凌阳16位单片机SPCE061A悬挂运动控制系统2011-03-07 4129
全部0条评论

快来发表一下你的评论吧 !
