

H桥驱动CN8001在微系统的驱动控制中的应用,兼容A3901
描述
步进电动机能直接将数字脉冲信号转换成角位移或线位移,其转速或线速度与脉冲的频率成正比,因此可以在很宽的范围内通过改变脉冲频率来调节电机的转速,广泛应用于各种自动化控制系统中。随着现代电子技术的发展,步进电机的驱动与控制电路由分立元件向集成电路发展,其体积不断缩小,在各种微系统的驱动控制中能得到广泛应用。
微型系统通常的通过串口通信来控制步进电机的,控制指令由在PC机的控制界面发送,单片机通过串口接收控制指令继而驱动步进电动机。串口通信采用USB转UART桥接器和驱动电路中的电机驱动芯片,都只需要很少的外围元器件,从而简化了驱动及控制电路,使其可应用于一些微控制的场合。
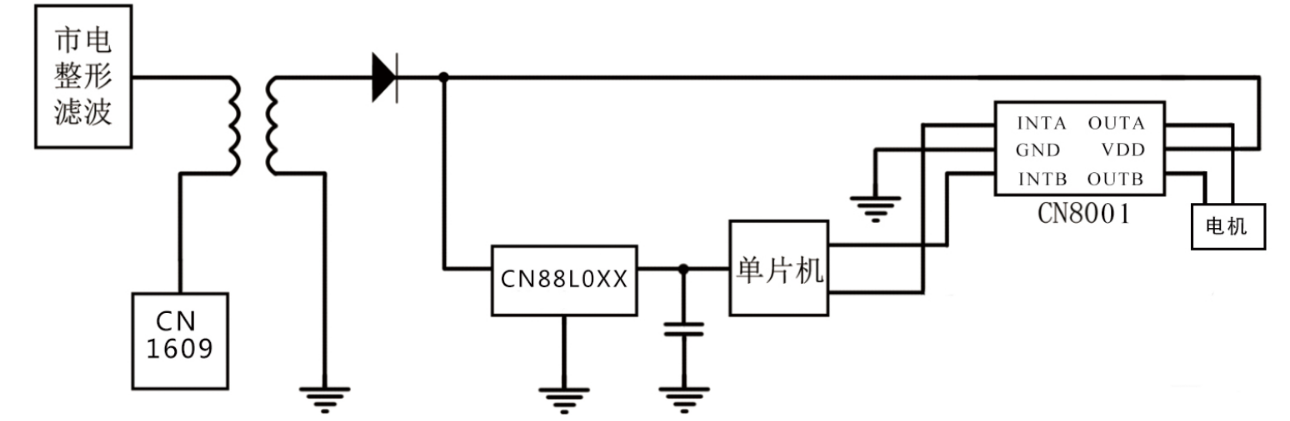
CN8001典型应用图
本文主要介绍芯北科技CN8001电机驱动芯片用于微系统的驱动控制,只需要很少的外围器件就可以工作,使电机的驱动器体积进一步得到缩小,有利于在一些空间尺寸要求较严的微控制场合中的应用。
CN8001是由两个输入引脚控制。两个开/关输入确定输出模式:前进,后退,惯性停车或制动。当两个输入均处于低电平时,可以实现非常低的待机电路电流。另外该芯片可在2.7V至6V的电动机电源电压下工作,根据逻辑控制,它可以提供高达0.8A的输出电流。
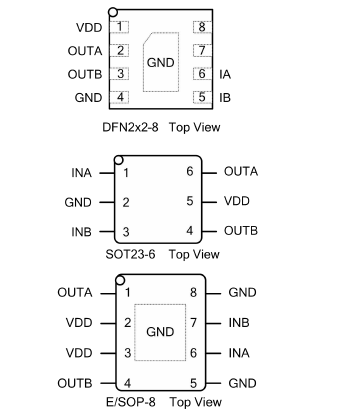
CN8001可用于驱动可逆电动机的H桥电动机驱动器,可驱动一个直流电动机,一个步进电动机的绕组或其他负载。提供DFN2x2-8,SOT23-6,SOP-8或ESOP-8封装。
芯北科技CN8001芯片特征及介绍:
• 宽功率范围: 2.7V至6V
• 0.8A最大连续输出
• 高于3A的峰值电流能力
• 低MOSFET导通电阻:Rhs=0.3Q,RIs=0.152
• 正向,反向,惯性或制动输出模式适用于广泛的MCU控制逻辑
• 输入逻辑迟滞,热关断
注:如涉及作品版权问题,请联系删除。
-
DRV8833兼容PT5139 H桥微步进电机 中低压步进马达驱动选型2018-09-30 4792
-
H桥驱动电路的设计与原理2020-07-15 3432
-
H桥式电机驱动电路的工作原理2009-07-16 10395
-
H桥电机驱动器CN8031在汽车空调控制器中的应用2022-05-16 1381
-
低功耗H桥电机驱动芯片在玩具车的应用2022-06-02 12399
-
H桥电机驱动电路设计与解析2022-11-06 21285
-
芯北科技推出的H桥电机驱动芯片CN80012022-11-16 2948
-
用于驱动可逆电动机的H桥电动机驱动CN8001A2023-04-20 640
-
H桥电机驱动器CN8001的性能特点2023-06-15 1472
-
用于美的风扇电机驱动的中微爱芯0.7A直流电机H桥驱动电路AiP6150H2022-05-06 2122
-
国芯思辰|芯北科技H桥电机驱动器CN8033替代明达微MD7620A用于智能床垫,支持4~24V宽压输入2022-07-28 1929
-
国芯思辰|芯北科技H桥电机驱动芯片CN8001(替代贝岭BL8023D)用于电动窗帘,2.7-6V宽电压供电2022-08-10 2575
-
国芯思辰|芯北科技H桥电机驱动电路CN8001(替代TI的DRV8837)用于摇头摄像机,峰值驱动输出电流0.8A2022-09-08 2494
-
H桥电机驱动器CN8042广泛应用于汽车电子、工业自动化2025-02-17 1442
-
A3901双全桥低压电机驱动器:特性、应用与设计要点2026-05-15 295
全部0条评论

快来发表一下你的评论吧 !
