

车载时钟同步can_tsync同步原理
描述
can_tsync同步原理
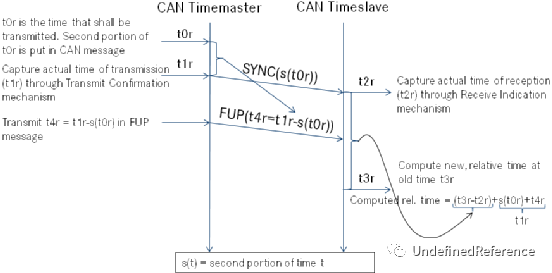
整体来说,can的时间同步还是比较简单的,如下图所示,整个过程如下(tips:时间戳自1970年1月1日00:00:00经过的时间,是由秒+纳秒组成的。):
1time master在t01时刻以广播的形式发送一个sync报文,并把时间秒部分的时间放到报文上,发送到time slave;使用can confirmation的机制,记下sync报文实际从can驱动发送出去的时间,t1r.
- time slave在t2r时刻接收到sync报文
- time master在sync发送完之后,随后发送follow up报文,并把t1r的纳秒通过报文发送出去,即t4r = t2r-s(t0r)。这里有一个潜在条件,那就是sync报文由can timesync模块组装好报文后调用发送接口,直到从can driver上出去,整个时间是不会超过1s的。所以t4r实际上就是从can timesync报文发送出去直到can driver发送出去的一个延时。
- time slave在t3r接收到follow up报文。
- 因此在t3r时刻,master此刻真正的时间t(master_now) = t3r - t2r + t4r
注意:实际上,上面的时间大多都是不精确的:
- 时间戳是软件加上的,并不是由硬件加上的
- 没有考虑can总线上的延迟
- 没有考虑到从t3r到adjust时钟这段时间的误差。

- SYNC和FOLLOW_UP消息分为两种格式,Type=0x10为不安全的不带CRC校验的报文格式,对应FUP消息类型为0x18;Type=0x20为带CRC校验的安全报文格式,对应FUP消息类型为0x28。
- Byte0:时间同步类型:0x20代表当前发送的是带CRC校验的TSync同步消息, 0x28代表当前发送的是对应0x20 SYNC消息的FUP同步消息;0x10代表当前发送的是不带CRC校验的TSync同步消息, 0x18代表当前发送的是对应0x10 SYNC消息的FUP同步消息;
- Byte1:byte0为0x20或0x28时,Byte1为该消息的CRC校验值;
- Byte2:高4位为时间同步域Time Domain;低4位为Sequence Counter,随发送次数循环累加;
- Byte3:byte0为0x10或0x20时,Byte3为UserByte0;同步类型为0x28或0x18时,高5位保留, bit3 SGW为时间同步状态(0:SyncToGTM, 1:SyncToSubDomain),bit1-bit0 OVS为时间同步溢出时间overflow of seconds;
- Byte4-Byte7为同步时间,同步类型为SYNC消息时为32bits 秒时间,同步类型为FUP消息时为30bits ns时间。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
功能齐全的高精度北斗pci授时卡#授时卡 #时钟同步卡 #PCI授时卡 #同步天下jf_27876553 2026-05-19
-
电力时钟同步系统jf_47371611 2026-05-11
-
TSN时钟同步精度技术解析:TSN网络的基石与保障2025-04-25 1590
-
同星多设备间的时间戳同步机制TSync功能与使用2024-10-12 4346
-
RobustRIO-E模块 时钟同步&分发,实现声音与振动板卡间及跨机箱时钟同步2024-09-14 870
-
时钟同步怎样组网?2024-01-16 1657
-
AUTOSAR CAN时钟同步问题2023-11-09 754
-
车载时钟同步can_tsync实现原理2023-10-27 5206
-
时钟信号的同步 在数字电路里怎样让两个不同步的时钟信号同步?2023-10-18 3375
-
微波时钟同步设计方案2017-12-07 1192
-
分析PTN时钟同步技术及应用2011-12-16 6376
-
同步网时钟及等级2010-04-03 4144
全部0条评论

快来发表一下你的评论吧 !
