

CAN总线位时序的介绍
描述
CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
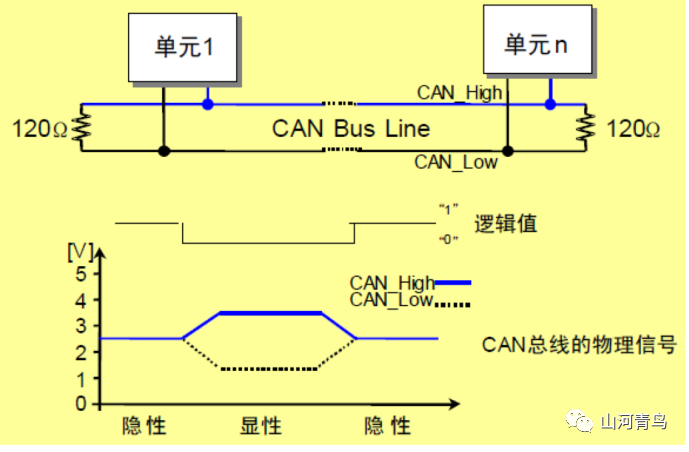

显性电平对应逻辑 0,CAN_H 和 CAN_L 之差为 2.5V 左右。而隐性电平对应逻辑 1,CAN_H 和 CAN_L 之差为0V。隐形电平具有包容的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平(显性电平比隐性电平更强)。
CAN总线是采用NRZ(Non-Return to Zero)方法进行通讯的,这种通信有一种不好的地方,就是各个位的开头或者结尾都没有附加同步信号。CAN总线在长距离运输中,由于发送单元和接收单元存在的时钟频率误差及传输路径上的相位延迟等,都会引起同步偏差。
这就导致信息传输不稳定,信号质量有问题。所以发送单元和接受单元都采用了一些通讯同步的方法来使二者电平传输能达到同步。
同步有两种方式,一种是硬件同步,一种是再同步。在解释同步之前,先介绍下位时序。
位时序--由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为 4 段。
• 同步段(SS)
• 传播时间段(PTS)
• 相位缓冲段 1(PBS1)
• 相位缓冲段 2(PBS2)
这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成。
1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。
1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。各段的作用和Tq 数如下图:

一个位的构成如下:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN位时序参数计算器2024-10-11 593
-
高速CAN总线和低速CAN总线的特性2024-01-31 5073
-
高速CAN速率 CAN总线位的4段2023-07-25 3441
-
CAN总线的位定时与同步机制#汽车CAN总线北汇信息POLELINK 2023-07-17
-
CAN总线错误的类型介绍2022-06-13 9720
-
虹科干货 | 带你全面认识“CAN总线错误”(二)——CAN错误类型2022-06-02 2728
-
探讨一下CAN总线的位时序与参数设置2021-08-20 1784
-
STM32的CAN外设位时序2021-08-11 2016
-
CAN总线介绍2021-08-05 1448
-
CANOpen系列教程04 _CAN总线波特率、位时序、帧类型及格式说明2020-03-06 9941
-
CAN总线基础的详细资料概述2019-11-29 2451
-
CAN通信控制的位时序逻辑--Bit Timing Logic具体实现2018-12-20 3654
-
can总线位时序是什么2018-12-17 4352
-
CAN总线仲裁示意图_CAN总线位仲裁技术及优缺点2018-05-07 17837
全部0条评论

快来发表一下你的评论吧 !
