

AUTOSAR CP的复杂驱动是什么
描述
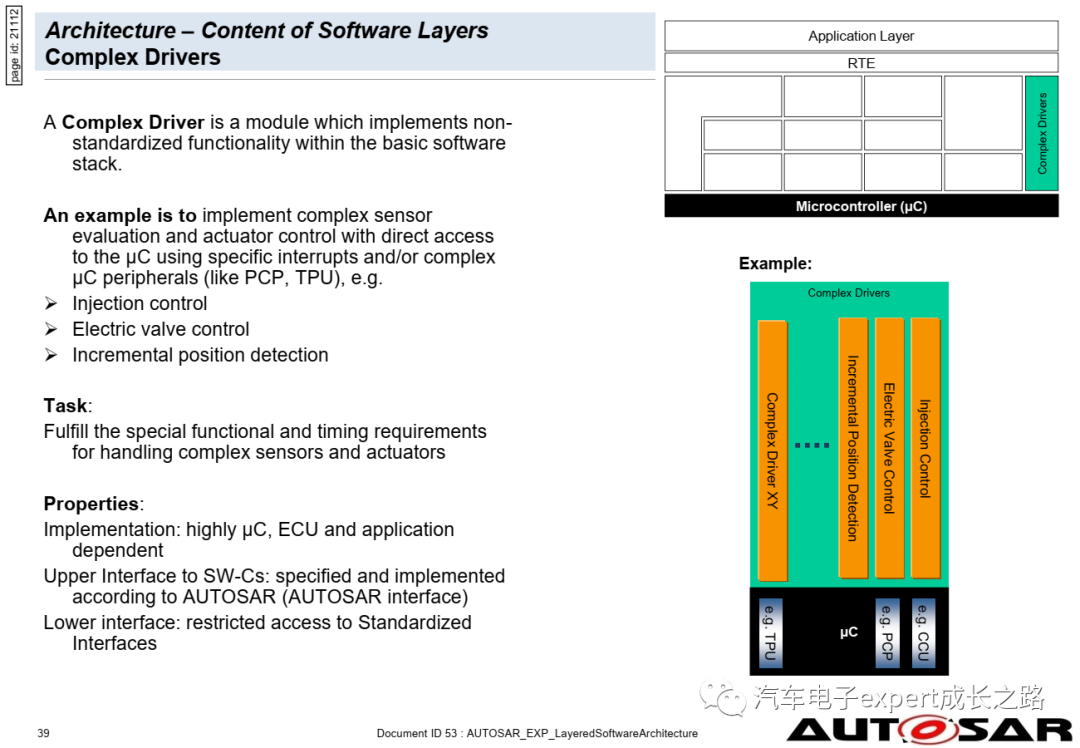
复杂驱动(CDD)
AUTOSAR CP的复杂驱动(CDD)是为了实现复杂的传感器评估和执行器控制而设计的。它通过直接访问微控制器来实现,使用特定的中断和/或复杂的微控制器外设、外部设备通信收发器、ASIC等,以满足特殊的功能和时序要求。此外,CDD还可以用于实现增强的服务/协议或封装非AUTOSAR系统的传统功能。CDD的实现可能与应用、微控制器和ECU有关。最后,CDD可以作为引入现有或新概念到AUTOSAR软件架构中的迁移机制。
在将CDD集成到AUTOSAR架构中时,设计人员应考虑以下几点:
- 提供用户手册,以便于集成和向客户提供信息。
- 描述CDD的功能操作,包括初始化、正常运行、关闭、故障操作等。
- 描述与其他BSW模块、SchM和Rte的关系和需求,例如从NvM获取的内存块、配置的临界区等。
- 描述接口,包括服务的名称、描述、可重入性、参数名称、类型、范围、返回值名称、类型、范围等。
- 描述非功能需求,如时序和行为要求、资源使用情况、与其他BSW模块或SW-C的行为等。
- 描述Dem错误、可选的Det错误、调试变量等。
- 描述配置参数的名称、类型、范围、值。
- 描述内存映射需求,如Flash、RAM的使用情况。
- 描述使用限制和未解决的问题。
- 描述与其他模块的集成约束和要求。
- 提供示例。
CDD的实现需要遵守AUTOSAR的一些约束,包括:
- 遵守输入规范。
- 使用SchM或操作系统机制来保护关键资源。
- 可通过EcuM和BswM模块管理CDD的模式。
- 可使用内存映射机制来处理内存段。
- 可使用Det或Dem模块报告错误。
关于CDD的文件结构,建议至少提供以下文件:
- CDD_.c:CDD模块的代码文件。
- CDD__Irq.c:中断函数的文件。
- CDD__Callout.c:回调函数的文件。
- CDD__Lcfg.c:链接时从配置生成的C对象的文件。
- CDD__PBcfg.c:构建时从配置生成的C对象的文件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
TC397如何同时运行CP Autosar OS和FreeRTOS?2024-01-24 1384
-
AUTOSAR架构中复杂驱动设计2023-12-21 8132
-
复杂驱动如何将现有的或新的概念引入AUTOSAR软件架构中的?2023-11-22 3094
-
AUTOSAR经典平台介绍2023-10-27 2772
-
解读AUTOSAR模式管理BswM配置2023-10-26 5502
-
AUTOSAR模式的FEE驱动程序可以与其他非AUTOSAR模式兼容吗?2023-03-21 831
-
AUTOSAR 解决方案 — INTEWORK-EAS-CP2022-05-21 1906
-
CAN网络管理规范 AUTOSAR CP中文版2022-04-06 1795
-
CP AUTOSAR EcuM的相关资料下载2022-02-11 1001
-
搞一下CP AUTOSAR 入门 | 04 CP AUTOSAR EcuM 详解2021-12-07 1576
-
AUTOSAR解决方案 — INTEWORK-EAS-CP2021-09-07 1337
-
面向汽车应用的AUTOSAR设计技巧2010-01-15 1471
全部0条评论

快来发表一下你的评论吧 !
