

CAN协议栈与LIN协议栈介绍
描述
CAN协议栈
汽车CAN协议栈是一种软件组件,用于实现汽车电子系统中的CAN总线通信功能。它包含了一系列的功能软件,用于处理CAN总线的物理层和数据链路层的通信协议。
汽车CAN协议栈的功能软件主要包括以下几个方面:
物理层驱动程序:负责与CAN总线物理层进行通信,包括发送和接收CAN消息,以及处理CAN总线的电气特性和信号传输。
CAN消息处理:负责解析和封装CAN消息,包括标识符的解析、数据的封装和解封装等。
错误检测和处理:负责检测和处理CAN总线上的错误,包括位错误、帧错误、CRC错误等,以确保数据的可靠性和完整性。
时序控制:负责控制CAN消息的发送和接收时序,包括帧的发送间隔、帧的优先级等。
网络管理:负责管理CAN总线上的节点和网络拓扑,包括节点的加入和退出、节点的状态管理等。
诊断和故障处理:负责诊断CAN总线上的故障和错误,并提供相应的故障处理机制,以保证系统的可靠性和稳定性。
汽车CAN协议栈是实现汽车CAN总线通信功能的关键软件组件,它提供了一系列的功能软件,用于处理CAN总线的物理层和数据链路层的通信协议,以实现可靠和高效的汽车电子系统通信。
2.2.2 LIN协议栈
汽车LIN协议栈是用于实现LIN总线通信的软件组件集合。它包含了实现LIN协议的各个层次的功能软件,以便实现LIN总线的通信和控制。
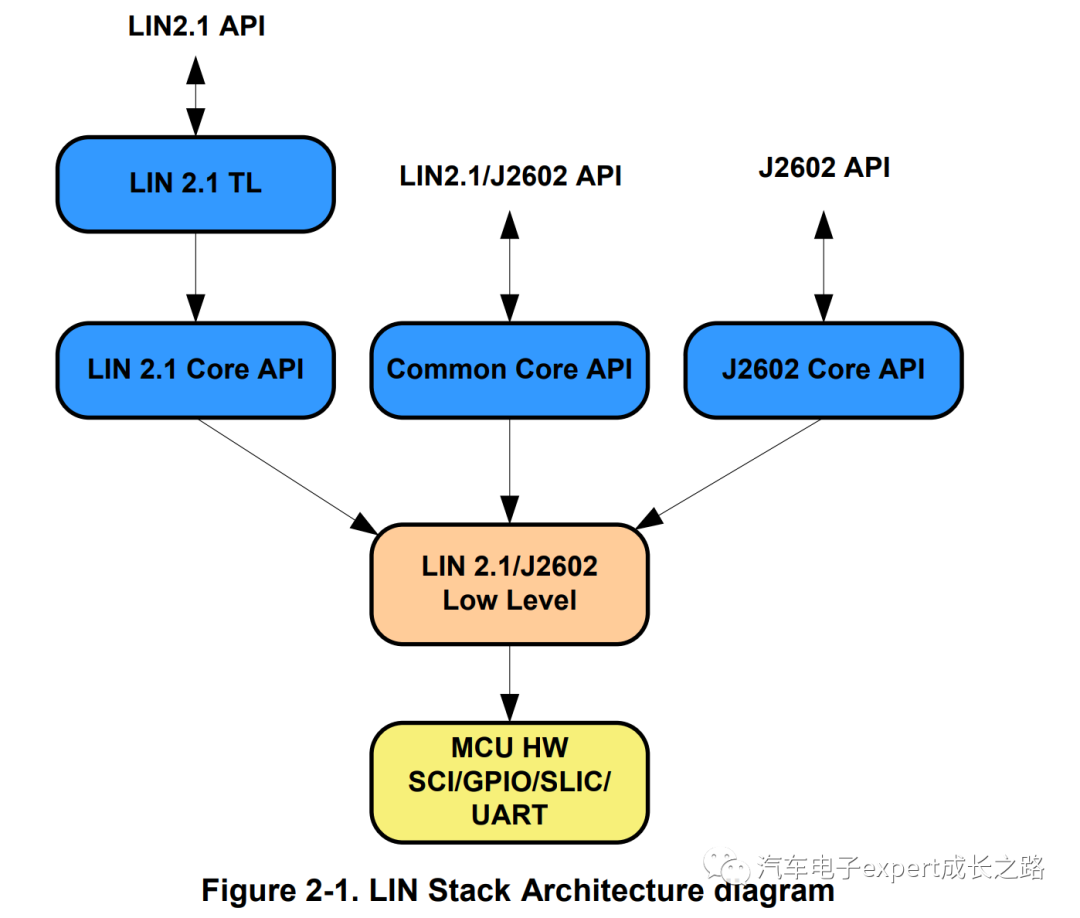
汽车LIN协议栈通常包含以下功能软件:
物理层驱动:负责将MCU的串行通信模块输出的信号转换为LIN总线的电平信号,并提供LIN总线的电气特性要求的支持。
LIN协议栈:实现了LIN协议的各个层次,包括帧封装、帧解析、错误检测和纠正、帧发送和接收等功能。
LIN网络管理:负责管理LIN总线上的节点,包括节点的配置、识别、诊断和错误处理等。
LIN应用层:根据具体的应用需求,实现了与LIN总线通信相关的应用功能,如车门控制、窗户控制、灯光控制等。

通过使用汽车LIN协议栈,开发人员可以方便地实现LIN总线通信功能,并根据具体的应用需求进行定制和扩展。
-
汽车UDS协议栈与XCP协议栈2023-10-27 6666
-
LIN基础知识和8位PIC单片机上实现的MCC LIN协议栈库2023-09-25 1253
-
tcpip协议栈是什么?tcpip协议栈有哪些协议?tcpip协议栈中报文封装和解封装过程2023-08-01 11326
-
低功耗蓝牙协议栈介绍2023-02-03 739
-
介绍RL-TCPnet网络协议栈2022-03-02 1870
-
Z-stack协议栈是什么2022-01-12 1405
-
介绍基于协议栈外设的开发2022-01-07 872
-
协议是什么 协议栈又是什么2021-08-05 1249
-
介绍飞思卡尔五种无线协议栈2020-07-02 3943
-
请问1.4的协议栈和1.3的协议栈有什么区别?2020-03-24 1750
-
uIP协议栈介绍2016-07-15 1422
-
协议栈介绍--TCP/IP2015-09-03 5127
全部0条评论

快来发表一下你的评论吧 !
