

PI的数学原理 PI结构及原理
电子说
描述
1. PI的数学原理
PI的原理是将时钟信号的幅度转换为相位,从而实现相位插值。
对于信号sin ωt和sin (ωt+π/2),可通过调整二者幅值,实现相位在0~π/2之间的信号。

其中,

对于,

C为常量,上式可写为:

函数tanx和

的趋势相似,在x=0时,二者均为0,tanx在x=π /2时趋于无穷大,

在x趋于C时趋于无穷大。
设C为1,利用Matlab,画出相位φ与A2的关系如下图所示。其中,蓝线为相位φ与A2的关系,红线为理想关系曲线。

Fig1. 相位与幅值的关系
可以将公式中π/2推广到π/4,π/8…,可推导出分相数越多线性度越好,但电路设计越复杂,一般都是分成四个相限。
2. PI结构及原理
PI的核心功能就是对来自cpll或qpll的四相位时钟进行相位插值,从而使输出相位能跟随PI code变化,最终使时钟边沿与数据中心位置对齐,达到最佳采样。PI整体框图如图2所示,通路包括DCC Circuit、Clock Buffer、Phase Mixer、Limiting Amplifier、CML-to-CMOS Converter、Divider Circuit、Bias和DAC电路。
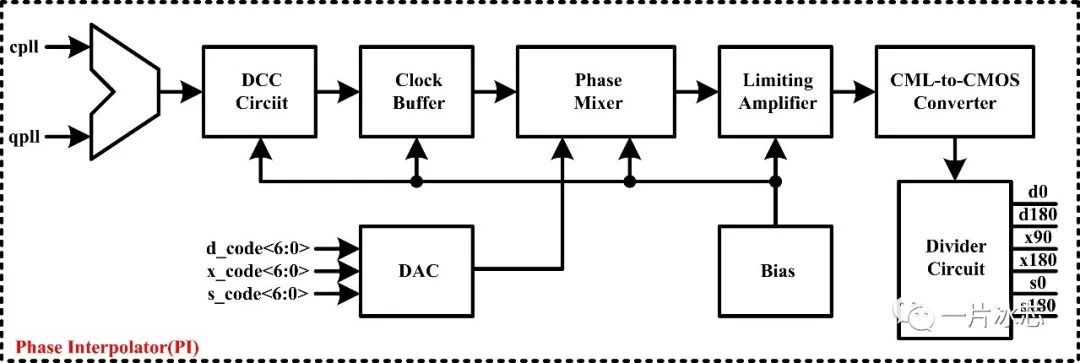
Fig2. PI整体框图
PI通路上的每个电路都不可或缺,下面章节将逐一分析每个模块的功能。
2.1 DCC Circuit
cpll或qpll本地产生的四相位时钟可以保证每个相位50%的占空比,但由于SerDes整体规模庞大,pll时钟往往经过上千微米的走线,layout中即使采用顶层金属,外加电源或地的Shielding也不可避免的产生干扰,进而影响PI输入时钟的占空比,而占空比失真对CDR的影响是致命的,占空比必须要严格限制在50%左右,有些设计会在PI进入CDR的slicer之前加入复杂的占空比校正电路。
本人用到的占空比校正电路较简单,结构如图3所示。该结构是一个电流源作负载的源级负反馈电路,整体传函呈现带通特性,可滤除pll时钟通路上低频干扰引起的占空比失真。
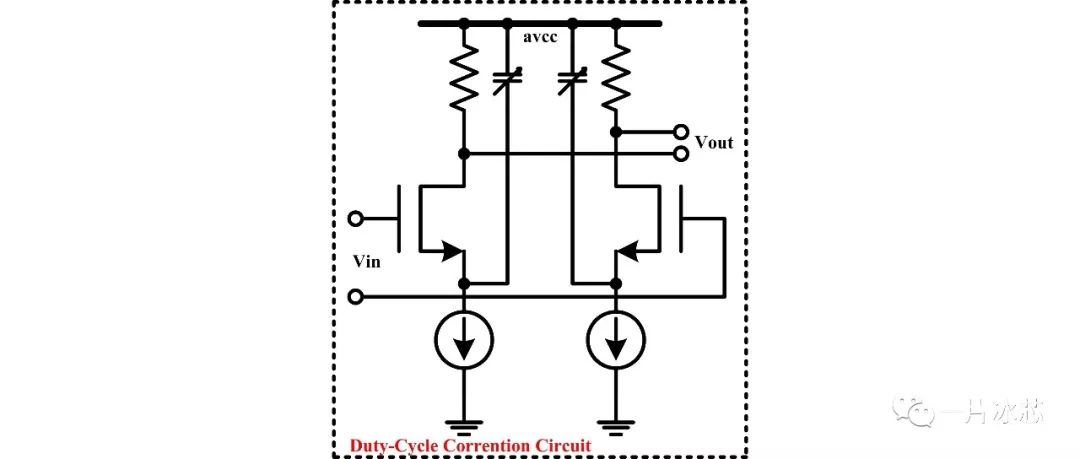
Fig3. Duty-Cycle-Correction Circuit
2.2 Clock Buffer
正弦信号和三角波信号插值可提高PI线性度,因此进入Phase Mixer之前需要将方波信号(通常为半摆幅)整形为正弦信号(三角波不易实现)。Clock Buffer通常采用一级或多级CML结构的Buffer,同时为了保证宽频率范围内都为正弦信号,Clock Buffer的负载电阻、电容及尾电流源通常设为可编程结构。
2.3 Phase Mixer
Phase Mixer采用CML结构,如图4所示。其中PIcntl每个相位区间(共四个相位区间)共有32种电流组合,因此插值精度为360°/128=2.8125°。
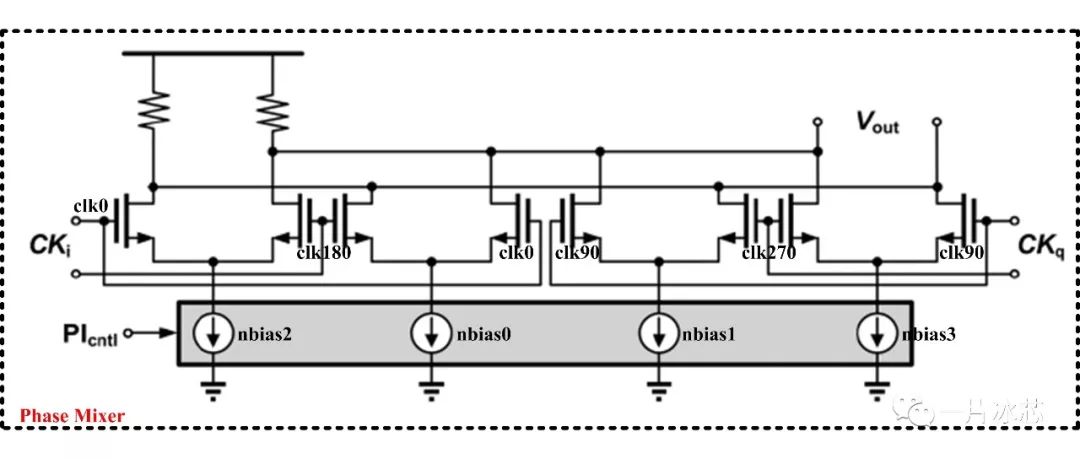
Fig4. Phase Mixer
进行相位插值时每次只选中两个尾电流源,选中方式由DAC单元中的d/x/s_code<6:0>中的高两位决定。具体控制方式如图5所示,其中Sel6和Sel5对应d/x/s_code<6:5>位,1LSB的ilive电流用于解决相位区间切换时尾电流建立时间引起的PI非线性。

Fig5.相位插值区间真值表
2.4 Limiting Amplifier
Phase Mixer输出信号幅度受DAC输入code调制,这会引入非线性,因此后一级需要增加限幅放大器,来解决幅度变化引起的PI非线性。限幅放大器与Clock Buffer结构类似,都是采用CML结构。
2.5 CML-to-CMOS Converter
前级Limiting Amplifier输出信号幅度为半摆幅的CML电平,进入分频器之前需要转换为CMOS电平,这就需要CML-to-CMOSConverter,结构框图如图6所示。
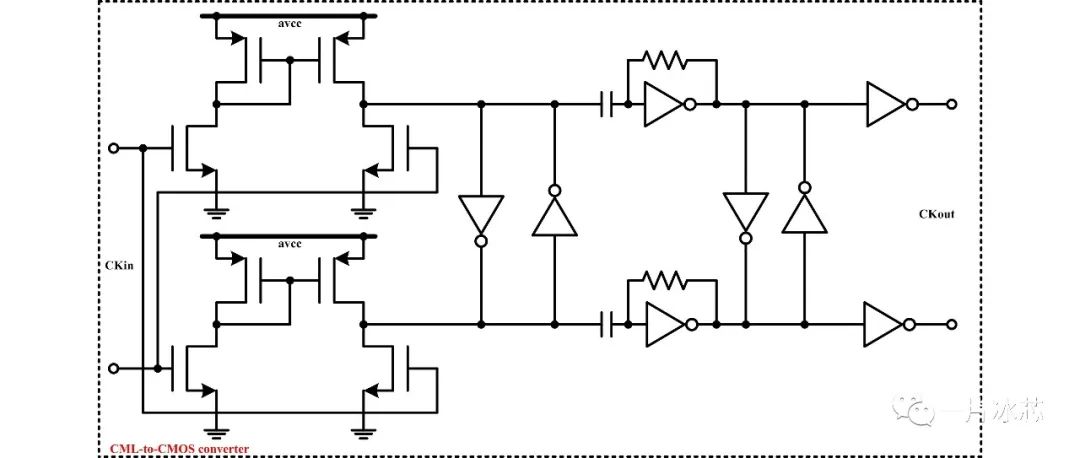
Fig6.CML-to-CMOS Converter
反相器自偏置的ac-coupling circuit结构可以隔离前级直流干扰,进而改善时钟占空比。
2.6 Divider Circuit
分频电路通过DFF级联的方式,对时钟信号进行1/2/4/8/16分频,来满足不同速率需求。分频器要特别注意复位时序,复位时序会影响时钟的初始相位,初始相位错乱,会导致后面所有相位固定错误。
2.7 Bias
Bias电路用于产生通路上所需的偏置电流。
2.8 DAC
相位插值器是在相位差为90°的4个相位区间进行相位插值,每个相位区间为了得到32个相位,需要一个5位DAC。为了获得较高精度的DAC设计,一般采用分段式结构的电流舵DAC。该结构是将数字码分为两部分进行转换,一般是较高位的数字码采用温度计码,低位的数字码采用二进制码。
相位插值器将相位控制信号转化为带权重的电流,再根据两个输入信号之间的相位关系对两个电流信号进行混合,通过负载电阻又将电流信号转换为电压信号输出。
该DAC电路输入的5位数字码采用高4位,低1位的分段结构,高位码为温度计译码,低位码为二进制码。行列译码为4位二进制码到温度计码的译码方式,其中行列译码都为2位二进制到温度计译码,即sel<4:1>位是温度计编码,控制15路电流源;sel<0>是二进制编码,控制1路电流源,通过5位控制编码可以产生32个电流台阶步长。
sel<4:0>都与sel<5>进行异或操作,这样可以保证相位区间切换时,电流不会发生突变。图7给出了采用行列译码方式的电流舵DAC顶层框图,其中pi_dacmlsb_cell和pi_dac_cell内部结构分别如图8和图9所示,行列译码和二进制译码逻辑如图10~12所示。
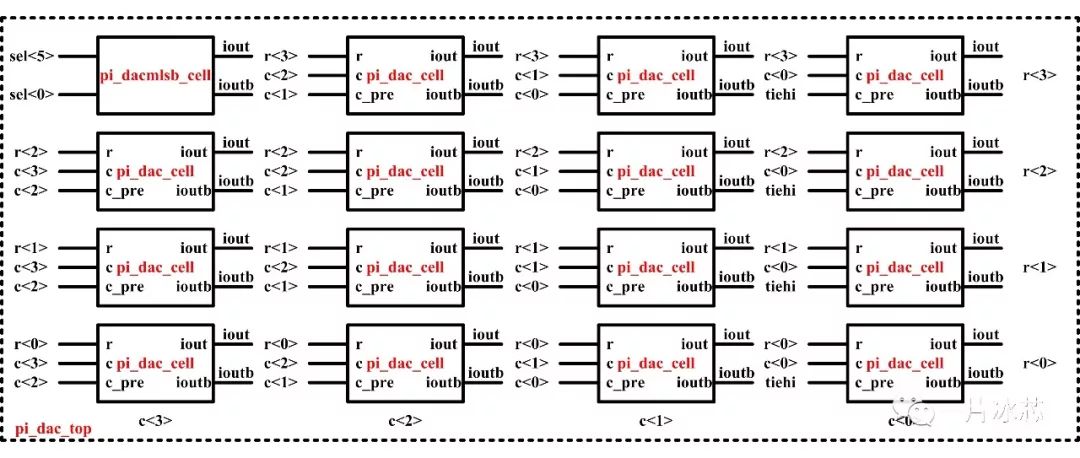
Fig7.DAC Top
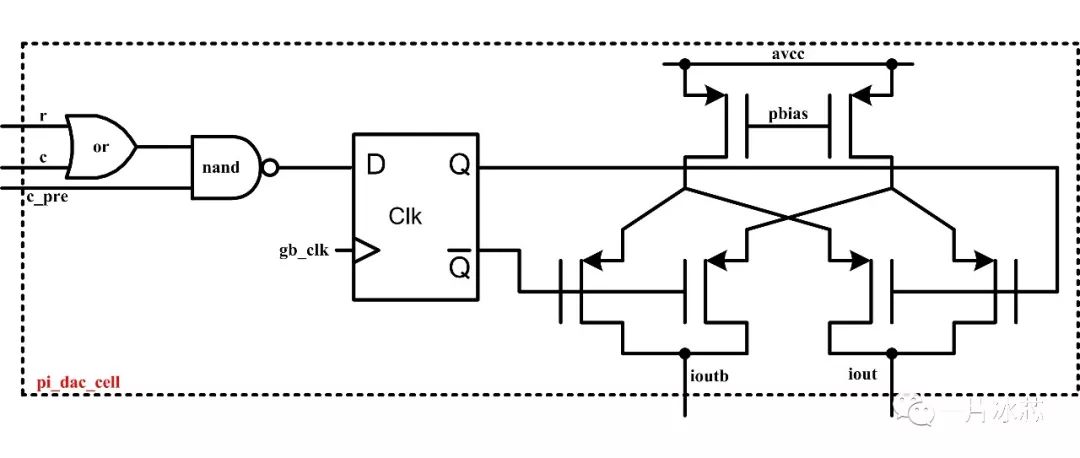
Fig8. DAC Top中的pi_dac_cell单元
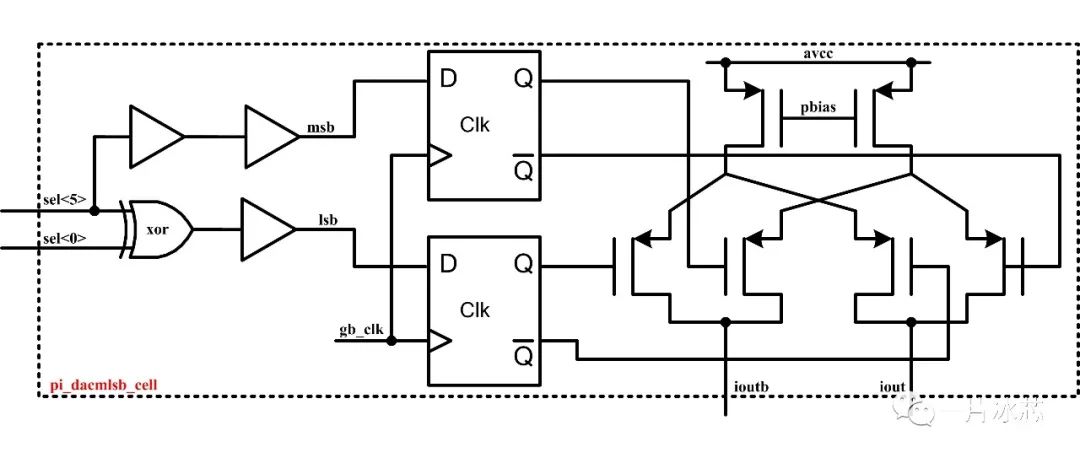
Fig9.DAC Top中的pi_dacmlsb_cell单元
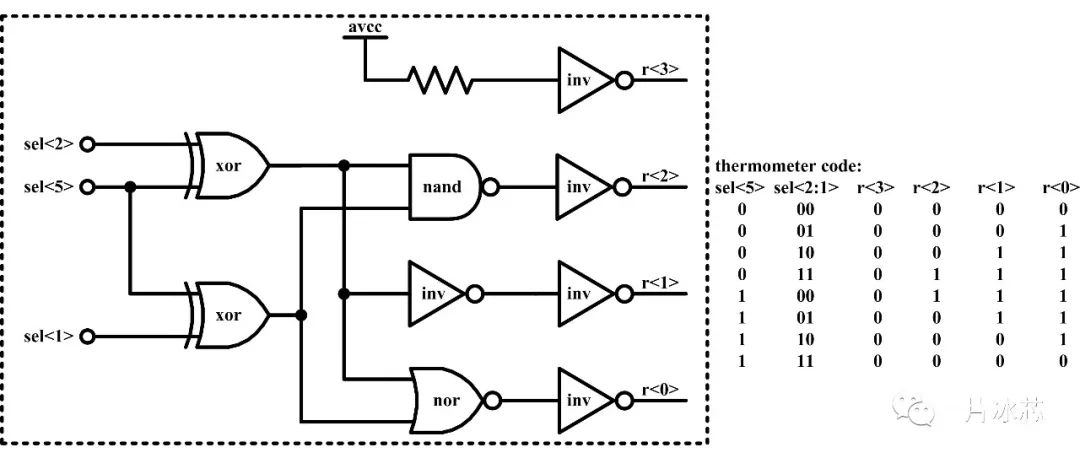
Fig10. 行译码产生温度码
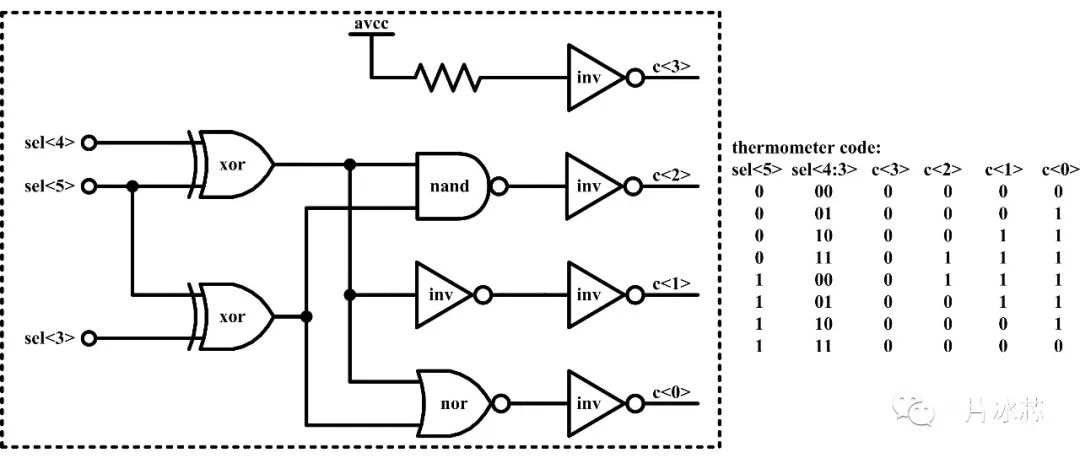
Fig11. 列译码产生温度码
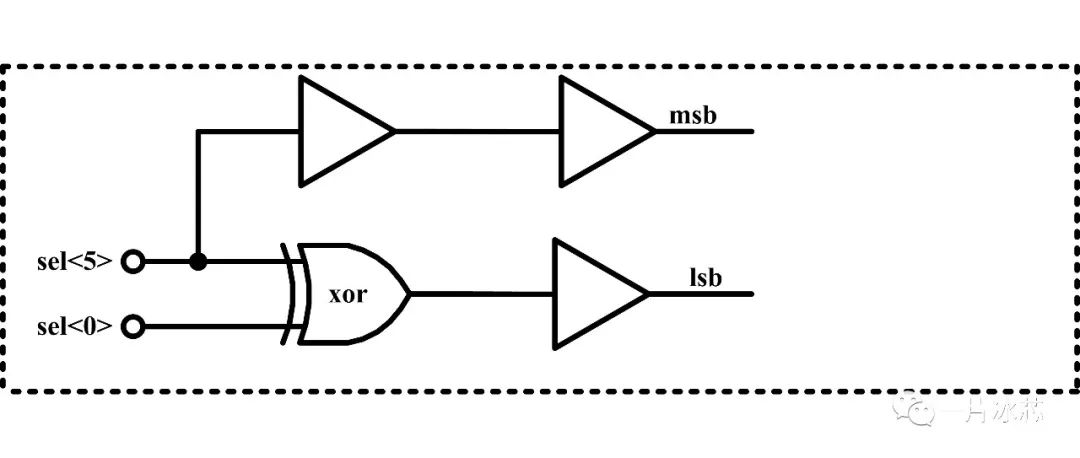
Fig12.高位和低位二进制码
**3. **测试结果
某一速率下,s路线性度对眼图的影响如图13所示。可以看出,s路非线路会导致眼图形状畸变,相当于眼图测量的“尺子”刻度不均匀。
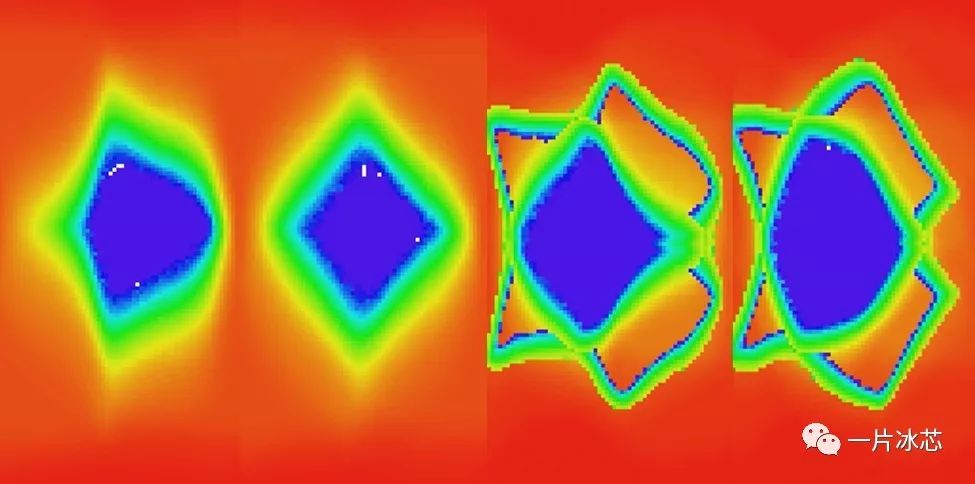
Fig13. s路非线性对眼图的影响
**4. **总结
①PI输出时钟要满足50%占空比,一般会加入占空比校正电路;
②正弦信号和三角波插值线性度高,插值之前需要整形;
③在非插值区间引入一个LSB的小电流,可以减小区间切换时尾电流的建立时间,从而提高PI线性度;
④PI后增加限幅放大器可以减小PI Code对幅度的调制,从而提高PI线路度;
⑤反相器自偏置的ac-coupling circuit结构可以隔离前级直流干扰,进而改善时钟占空比;
⑥分频器复位时序会影响时钟的初始相位,初始相位错乱,会导致后面所有相位固定错误,设计时应多加留意;
⑦DAC产生的电流要呈现温度码特性。
-
傅里叶变换的数学原理2024-11-14 4690
-
Banana Pi M5 与 Raspberry Pi 4 – 基准测试2024-10-28 3305
-
Banana Pi BPI-EAI80 物联网开发板DXF结构文档2023-09-04 777
-
串联型PI和并联型PI调节器的比较2023-07-16 7779
-
用Raspberry Pi和圆形樱桃派计算Pi2022-12-30 879
-
PI调节器介绍及设计2022-09-19 9801
-
变压变频调速的数学原理是什么2021-08-03 1901
-
GraphSAGEGNN算法的数学原理是什么?2021-06-17 1739
-
raspberry pi官网2020-03-07 7435
-
冷或门系列PI2121、PI2123 及 PI2125的应用指南2017-09-13 1865
-
区间二型模糊PI_PD控制器设计与结构分析_雷宾宾2017-01-08 983
-
dq坐标变换数学原理2016-12-20 1212
-
raspberry_pi各版本差别2016-01-06 1434
-
PI推出电源设计软件PI Expert7.1.5版PI2009-11-26 3978
全部0条评论

快来发表一下你的评论吧 !
