

24GHz轨迹跟踪雷达模组,可检测区域内人员位置、数量
描述
前言
安信可新款雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。
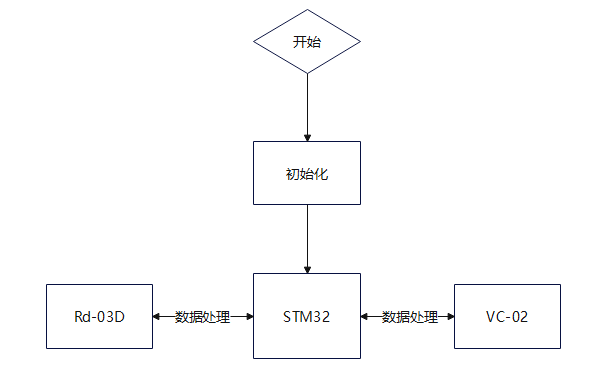
本应用示例使用STM32解析Rd-03D的串口数据,将结果通过另一个串口发送给VC-02开发板,实现对当前人数的实时播报。
01Rd-03D引脚说明
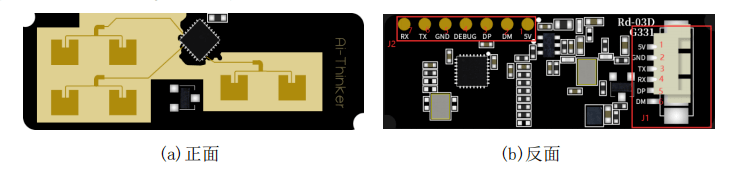
J1引脚说明:

J2引脚说明:

02软件设计框架
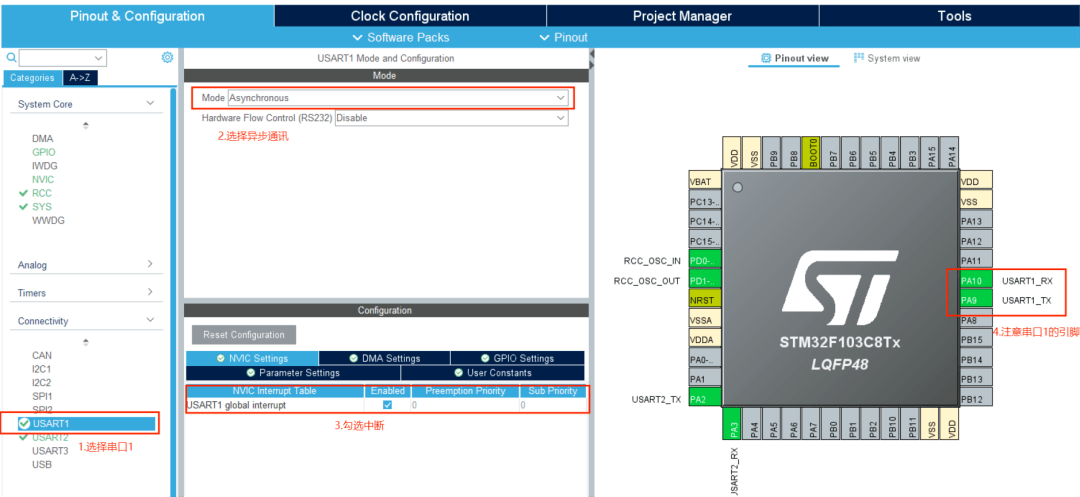
03STM32F103C8T6使用CubeMX搭配HAL库配置
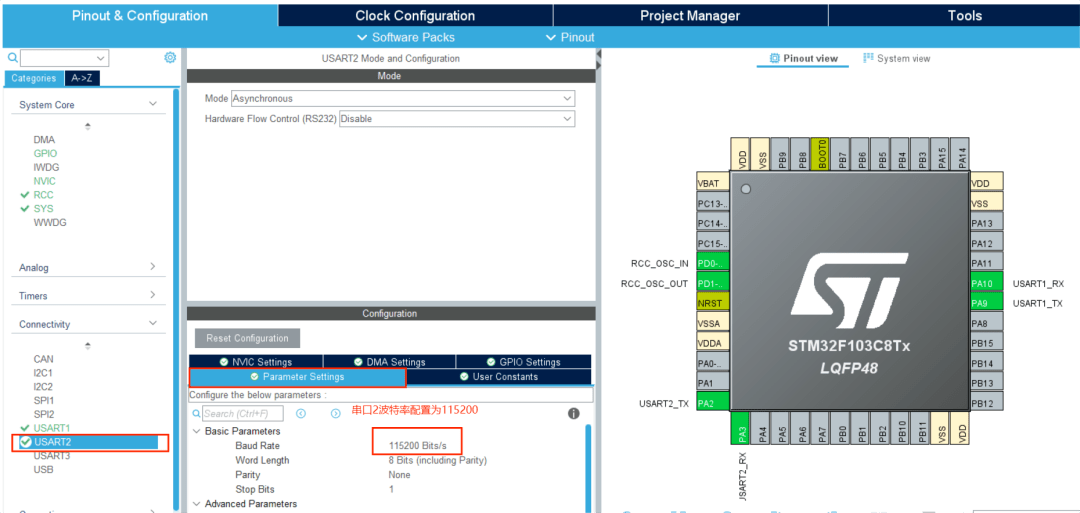
打开CubeMX,选择STM32F103C8T6。
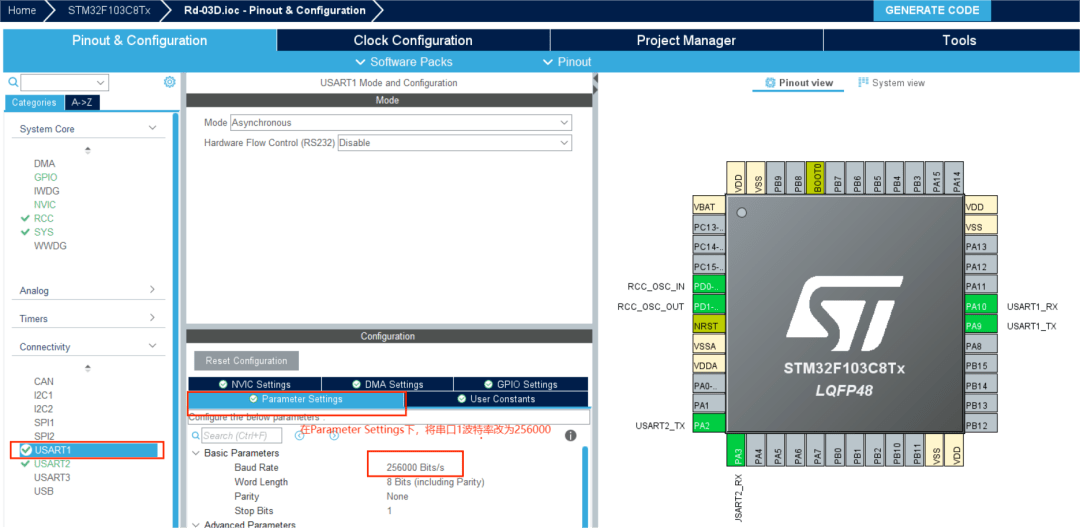
选择两个串口,分别是串口1和串口2,PA9为USART1_TX,PA10为USART1_RX,PA2为USART2_TX,PA3为USART_RX。
选择异步通讯,勾选中断,注意:串口1的波特率为256000,串口2波特率为115200。
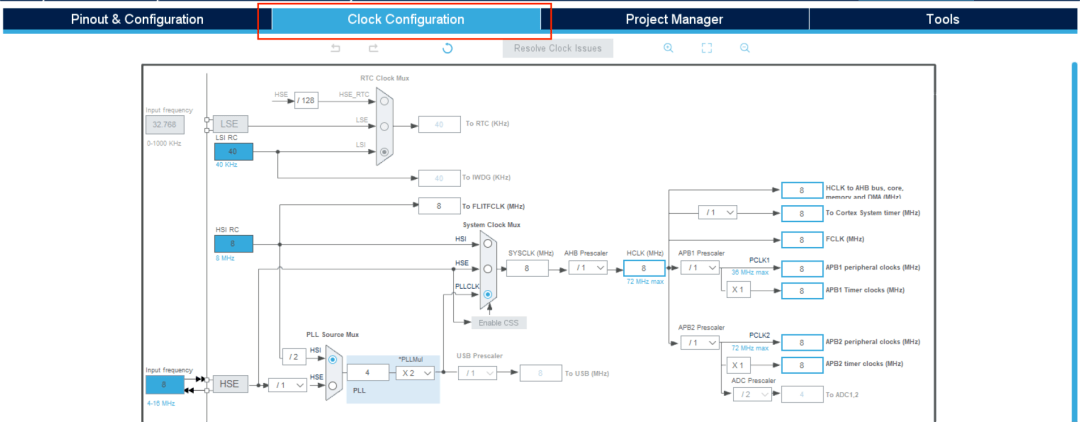
下面附上时钟配置图:
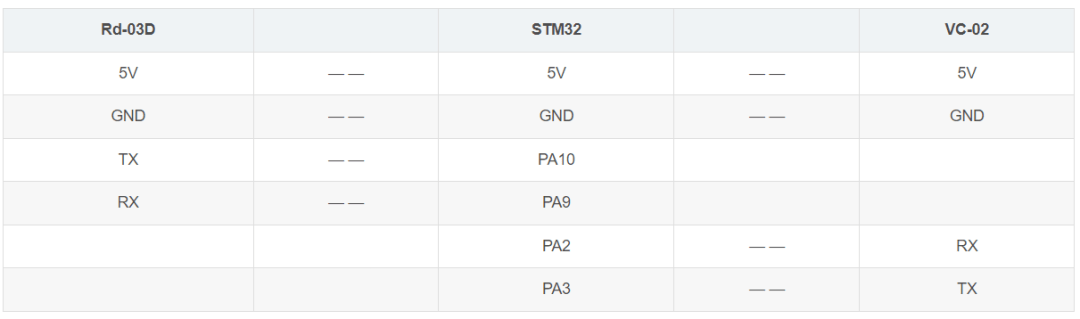
04STM32与Rd-03D和VC-02的接线
05串口数据处理
一、Rd-03D的串口数据
Rd-03D模组通过串口(TTL电平)与外界通信,雷达串口默认波特率为256000,1停止位,无奇偶校验位。雷达输出检测到的目标信息,包括在区域中的x坐标,y坐标,以及目标的速度值。
雷达默认是处于单目标检测模式,需要切换至多目标检测模式。

上报是数据帧格式:

数据示例:AA FF 03 00 0E 03 B1 86 10 00 68 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 55 CC
红色部分表示目标1的信息,蓝色表示目标2的信息,绿色表示目标3的信息。(详情可查看原博文内容)
本示例只展示有无人,所以只需要判断在对应的数据帧中有没有相应的目标信息即可。
二、VC-02的串口数据
VC-02的串口数据格式是由用户自定义的,开发的平台和资料可以在VC系列模组官网查看
这里附上测试中定义的串口协议和语音指令表格,串口输出均为16进制数,文章结尾附上VC-02固件。

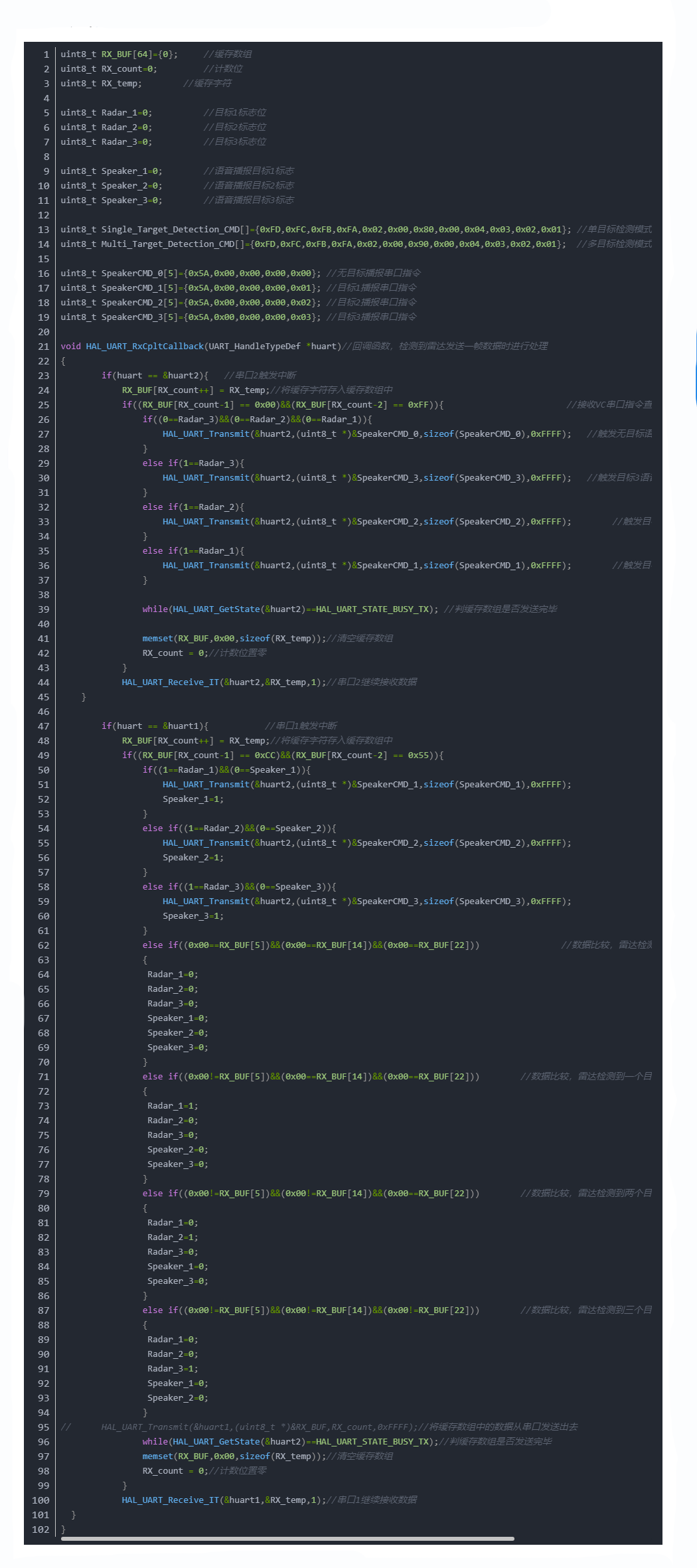
06、STM32数据处理
这里我是采取设置标志位的方式处理数据。为了防止在雷达数据下发过快时,语音一直重复播报的情况。
审核编辑 黄宇
-
24GHZ雷达传感器的选型及运用基础2013-12-20 5536
-
停车位检测24GHZ雷达传感器/短距离测距/低成本2014-01-03 14599
-
24GHz微波雷达FMCW测距系统设计概述2015-12-29 19392
-
RFbeam 24GHZ雷达传感器手册2018-01-28 7141
-
24GHz微波测距雷达 FMK24-A系列,无人机避障雷达2018-04-06 3159
-
Infineon 24GHz毫米波雷达开发资料2017-03-03 1848
-
巍泰技术毫米波人员感知雷达目标检测计数跟踪技术赋能平安城市智慧消防2023-06-07 1615
-
毫米波雷达使用频段“靴子落定”,24GHz路侧交通检测雷达仍是主流?2023-07-10 4311
-
多人轨迹怎么识别?安信可Rd-03D雷达模组能做到!2023-10-16 1789
-
跌倒检测雷达模组_数据手册2022-07-14 1162
-
24GHz轨迹跟踪人体感应雷达模组,可检测区域内人员位置、数量2024-08-13 3092
-
可检测微动目标 24GHz人体感应雷达模块ME73MS01惊艳来袭!2024-08-30 1916
-
24G雷达模块LD2450 支持人体移动轨迹跟踪与手势识别2024-10-27 2767
-
24GHz轨迹跟踪雷达模组,可检测区域内人员位置、数量2025-01-17 1556
-
24G人在感应雷达和24G目标轨迹跟踪雷达的区别2025-08-19 1700
全部0条评论

快来发表一下你的评论吧 !
