

常见的几种陀螺仪工作原理
MEMS/传感技术
描述
作者:王珍妮 杨功流 蔡庆中
美国物理学会在Physics 杂志上发布了2021 年的物理学年度亮点,其中的一大亮点是“物理学中的俏皮旋转”,介绍了由天体物理学家肯尼思·布雷彻设计的一种新型旋转陀螺。肯尼思·布雷彻对陀螺的兴趣始于他对中子星旋转运动的理解,中子星会发生摆动或者进动,这跟陀螺的性质是相似的。后来布雷彻教授开始自己制作陀螺,他利用数学常数设计了一个单项旋转陀螺DeltaCELT,这种陀螺具有优先旋转的方向。在陀螺的顶部,有两个椭圆形的凹坑,顶部的长轴与短轴的比值为Feigenbaum 常数。这种非对称形状使得DeltaCELT 陀螺有一个优先的旋转方向,当陀螺逆时针旋转时,陀螺正常自由旋转,当顺时针旋转时,陀螺会迅速减速到停止,并开始来回摆动,然后,它将这种摇摆运动转换成逆时针方向的旋转,这是一种很神奇的旋转方式,可能会对一些数学物理的设计工作有启发的作用。
在现代物理学发展中,陀螺由于具有定轴性和进动性被应用于角速度的测量。根据牛顿第一定律,当物体不受外力作用时,有保持原有运动状态的性质。当陀螺高速旋转时,在没有外界力的作用下,根据角动量守恒原理,陀螺的角速度大小和方向也都保持不变,即拥有定轴性;当在陀螺上施加外力矩时,根据牛顿第二定律,物体受到的力矩与角动量的时间变化率成正比,方向指向合外力矩方向,陀螺的动量矩矢量会以最小的速度追赶外力矩,因此陀螺会沿着角动量所在的轴向倒向外力矩的方向,进而产生陀螺进动角速度,方向可以根据右手螺旋定则确定,这就是陀螺的进动性。
基于以上原理设计的角速率测量仪器就叫作陀螺仪,1904 年,赫尔曼·安舒茨和埃尔默·斯佩里设计了世界上首个机械陀螺仪,实现了角速度的精确测量。随后被应用于各类导航与运动控制场景中。近百年来,随着电子科学、光学、量子科学的发展,陀螺仪技术也经历了传统转子陀螺、光学陀螺、量子陀螺和谐振陀螺这几个大的发展阶段,各种各样的陀螺仪也在国防、自动驾驶、手机防抖、游戏传感等方面得到了广泛的应用。下面我们逐个介绍几种陀螺仪。
1. 传统转子式陀螺
传统转子式陀螺是最早的陀螺仪,利用高速旋转的陀螺具有定轴性和进动性来测量载体的角速度。在使用时,将高速旋转的转子固定在框架内部,使其有一个转动自由度。这种陀螺很容易受到外部振动信号的干扰,并且转子与支承之间也很容易产生摩擦,因此在传统转子式陀螺中,支承系统是很重要的一部分,决定了陀螺的精度。传统转子式陀螺按照其支承系统的不同分为:滚珠轴承支承陀螺、气浮陀螺、液浮陀螺、动力调谐陀螺以及静电陀螺等。下面将通过介绍三浮陀螺来理解这类陀螺。

图1 传统转子陀螺
三浮陀螺是一种单自由度积分陀螺,其支承系统由液浮、动压气浮、磁悬浮三浮组成,故称为三浮陀螺。三浮陀螺由陀螺马达、浮子组件、角度传感器、力矩器、磁悬浮元件、高比重浮油、宝石轴承组件、温控组件、壳体、端盖,连接器等组成。电机转子采用动压气体支承技术,陀螺马达运用液浮技术,磁悬浮技术用来消除陀螺浮子组件与宝石轴承的摩擦力。
图2 三浮陀螺仪内部结构图
工作状态下,陀螺壳体与安装基座固连,陀螺马达高速旋转形成角动量并产生陀螺效应,在沿输入轴有角速度或力矩时,陀螺仪沿输出轴进动。在测量过程中,陀螺电机绕陀螺的自转轴高速旋转,形成稳定的陀螺角动量H,当载体(基座或壳体)绕输入轴转动时,根据陀螺效应,由陀螺电机组成的框架组件将绕输出轴进动,并在浮油的作用下产生阻尼力矩。稳态时,沿陀螺输出轴的合力矩为零,浮子转角是载体角速度ωI 的函数,通过传感器测量浮子转角,从而实现对载体角速度ωI 的测量。
传统转子式陀螺是目前工程应用中精度最高的陀螺,但其尺寸较大,主要应用于战略级核潜艇、导弹等对精度要求较高、体积较大的场景中。
2. 光学式陀螺
光学式陀螺的理论基础是萨格纳克效应。20 世纪初,法国科学家萨格纳克提出了萨格纳克效应。对于一个简单的理想圆形光路,当光路相对惯性空间没有转动时,在一点注入两束相向传播的光,两束光在传播一周后的光程长度相同,可以同时返回到注入点。当光回路沿顺时针旋转时,光源的注入点也会相应转动,沿逆时针方向传播的光波沿闭合光路传播一周再回到光波注入点时,走过的实际光程小于2πR,沿顺时针方向传播的光经一周回到原点时经历的光程大于2πR,光程差产生时间差,进而产生相位差。由于这两束光频率相同,相位差恒定,当两束光相遇时会产生干涉,当在环路平面内有旋转角速度时,屏幕上的干涉条纹将会发生移动,这就是萨格纳克效应。
图3 萨格纳克效应示意图
光学陀螺有激光陀螺和光纤陀螺两种,其基本原理都是萨格纳克效应,下面将介绍光纤陀螺的基本原理。
1976 年,瓦利和肖特希尔成功地制作了第一个光纤陀螺,目前,国内光纤陀螺精度已经可以做到0.001°/h。与机械陀螺相比,光学陀螺抗干扰能力强、无磨损、使用寿命长、信号可靠、动态范围较宽,结构简单、价格也较低。
图4 光纤陀螺原理示意图
以干涉型光纤陀螺为例,干涉型光纤陀螺由光源、调制器、光纤环(光纤缠绕形成,半径为R)、耦合器和探测器这五大光学器件构成。光源发出的光经过分束器后变为两束光,这两束光分别从光纤环的两端进入,反向传输,之后通过耦合器并产生干涉。当外界没有转动时,传输后的两束光相位差为0,当光纤陀螺以一定的角速度Ω转动时,由于萨格纳克效应,会产生相位差:
Δφ = [(8nπ2R2/λc)]Ω
其中n 为光纤匝数;λ为光波长;c 为真空中的光速。相位解调器分析出干涉信号,得到相位差Δφ,利用上式即可求出角速度Ω。
光纤陀螺技术目前已经达到较高的水平,主要的技术指标也接近高性能惯导的需求,具有高精度、高可靠性的特点,已经广泛地应用于捷联式惯导中,在飞机、传播、汽车的导航系统中都有所应用,并且在民用领域,光纤陀螺也在石油钻井和机器人控制等领域发挥着重要作用。
3. 振动式陀螺
振动式陀螺仪是基于哥氏效应的一种陀螺仪类型,主要有半球谐振式陀螺仪和MEMS陀螺仪两种。
半球谐振陀螺是一种基于哥氏振动效应的固体波动陀螺仪,由激励罩、激励电极、谐振子、读出电极和读出基座构成,谐振子是其中的核心部件。半球谐振陀螺的陀螺效应是由谐振子中径向驻波在外界旋转激励条件下的哥氏效应引起振型的进动来实现的,具有高精度、高可靠性和长寿命,与光学陀螺相比,其结构简单,不易损坏,目前精度已经可以达到0.0001°/h,可以达到惯性级,属于高精度陀螺仪,在哈勃望远镜上也使用了半球谐振陀螺。
图5 半球谐振陀螺组成
半球谐振陀螺的激励罩、谐振子以及读出基座都是由熔融石英玻璃材料加工而成,这种材料物理和化学特性都十分稳定,品质因数高。半球谐振陀螺结构简单,当装配完成后,整个陀螺可以完全固连,具有非常高的抗冲击性能,并且谐振子在受激振动时,其振动只有几微米,因此其内部结构不会有任何破坏并且也不会有集中应力产生。半球谐振子受激产生震动,当谐振子处于二阶驻波震动状态时,会产生4 个波腹和波节,当陀螺仪没有外界的旋转时,波腹和波节的位置保持不变,当外界有一个角速度时,哥氏加速度会使得谐振子的振型发生变化,在沿谐振子直径方向的振动力附加一个切向力,使得振型与谐振子的相对位置发生变化,驻波发生进动,进动角与旋转角成正比,比例因数只与谐振子的材料属性相关,与外界角速率大小无关。
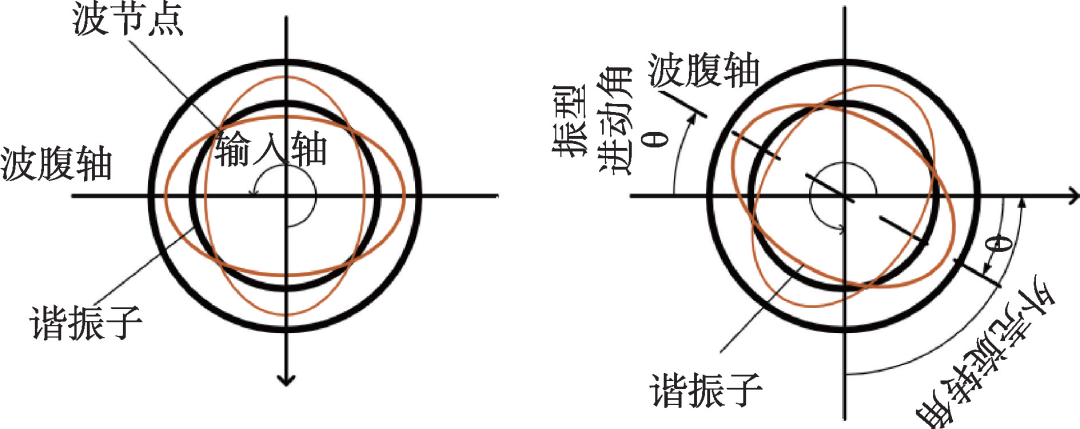
图6 半球谐振陀螺工作原理
半球谐振陀螺有两种工作模式,一种是力平衡模式,一种是全角模式。在力平衡模式下,属于角速率陀螺,四波腹振型由于反馈力的作用克服哥氏力与壳体保持一致,根据所施加反馈力的大小,输出一个电压信号,通过转换得到角速率值。在全角模式下,属于速率积分陀螺,谐振子中的四波腹振型随着外界角速度变化自由进动,通过检测四波腹振型的方位信息来算出外界施加角速率的大小,可以直接输出角度值。
半球谐振陀螺是目前一种很有前景陀螺仪,可以实现高精度陀螺仪的小型化、低成本等,得到了国内外惯性技术领域的很大关注。
微机电(MEMS)陀螺仪是振动式陀螺的另一个分支,MEMS陀螺仪的体积小、质量轻、功耗低、成本低,在军用和民用领域都有很广泛的应用。
MEMS 陀螺仪的基本原理是科里奥利效应。科里奥利效应是指处于转动参考系中的物体在运动时受到的一种惯性力,在旋转坐标系中运动的物体会发生偏移的现象,这种偏移就是由于产生了科里奥利力。当一个质量元件在平面内做正弦振动时,如果该平面同时以一个角速度做旋转运动,在科里奥利效应的作用下,质量元件将垂直于平面(谐振轴)做正弦振动,方向符合右手螺旋定则,振幅与角速度成正比。MEMS 陀螺是一种振动式陀螺,利用科里奥利力将陀螺的转动转化为垂直于平面的正弦振动,通过测量该轴的位移从而得到输入角速率的大小。不同类型的MEMS陀螺仪就是其检测科氏力的方式不同。
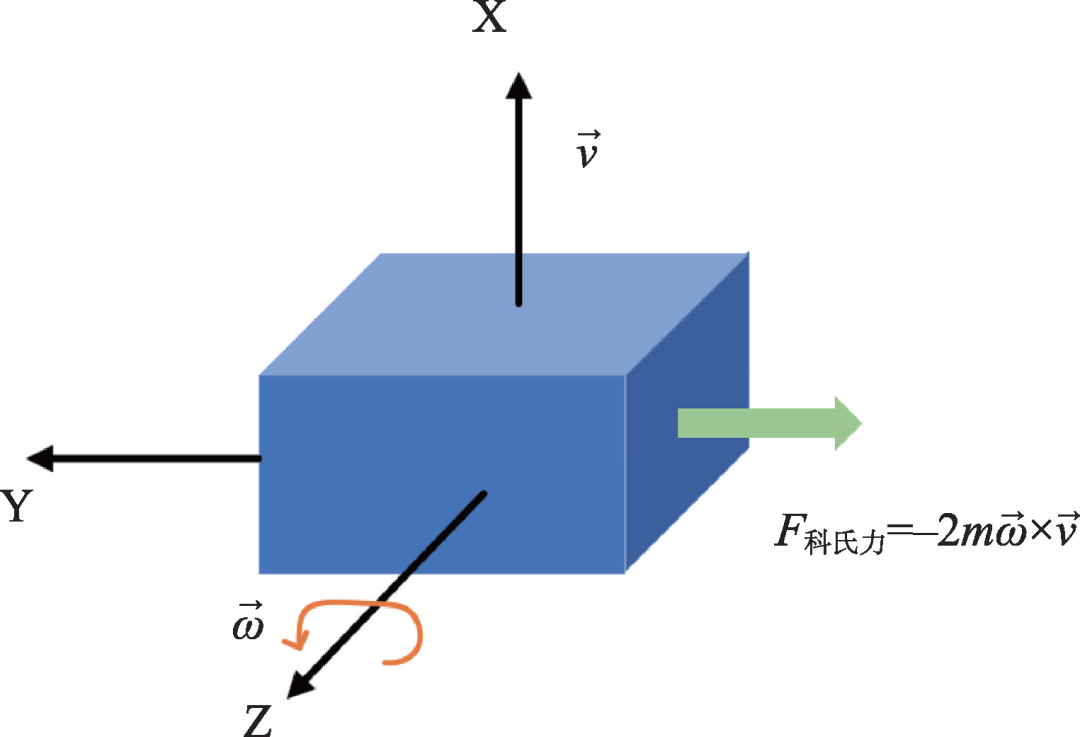
图7 科里奥利效应
MEMS陀螺仪已经高度集成化,可以大批量生产,在数码相机、汽车、机器人、手机等一些与我们日常息息相关的方面都有很大的应用,是陀螺仪小型化的一个很大的发展。但MEMS陀螺精度较低,主要应用于军用战术级市场以及民用领域。目前,MEMS陀螺的主要研究方向为结构小型化、制造工艺提升、电路的误差补偿等方面。
4. 量子陀螺仪
20 世纪量子技术发展迅速,推动了量子陀螺仪的产生。量子陀螺仪是基于量子力学原理的高灵敏角速度测量装置,分为原子干涉式陀螺仪和原子自旋式陀螺仪两种。量子陀螺目前还在实验研究验证阶段,尚未形成大规模应用。
原子干涉陀螺仪核心原理与光干涉原理相似,其核心在于原子的波动性。原子具有原子波,原子波的波长极短,在室温下约为1/100 nm,而可见光波长在400~700 nm左右,因此利用原子波可以测量更小的距离差,分辨率更高。目前,原子干涉陀螺最前沿的发展方向为冷原子团型原子干涉陀螺仪。
冷原子团型原子干涉陀螺仪具体形成方法为利用磁光阱“冷却”原子,确保原子可以保持在磁光阱中央,冷原子团在这种情况下存在时间会变长,从而可以进行物质波干涉。之后利用激光,引导原子团在系统中向特定方向运动。当原子处于同一内态,速度一致时即可发生干涉,可以利用泵浦光改变原子内态,使用推斥光将磁场敏感状态的原子吹走,运动过快的原子也会在上述过程中与大多数原子分离,实现速度选择。当光学陀螺仪与原子干涉陀螺仪干涉环路面积相同时,转动角度产生的相移比激光陀螺仪高出约10个量级。
原子自旋式陀螺仪分为核磁共振陀螺仪(NMRG)、无自旋交换弛豫陀螺仪(SERFG)以及金刚石NV 色心陀螺三种。NMRG是利用原子核自旋敏感载体转动信息、SERFG是利用电子自旋敏感物体转动信息、金刚石NV色心陀螺是利用空穴中电子自旋敏感载体运动。这里将重点介绍SER 陀螺仪。
无自旋交换弛豫陀螺仪是一种固态陀螺仪,角动量由原子内部的粒子即碱金属气室中的碱金属原子和稀有气体原子相互作用而产生。SERFG 的核心就是碱金属原子的电子和稀有气体原子的原子核。碱金属原子由于其内部的电子分布其内部总动量和总磁矩为0,其外部有一个自由电子,因此可以将碱金属原子看作一个自由电子。稀有气体原子总的角动量仅为原子核自旋角动量,可以等效为一个原子核。
原子自旋陀螺仪有驱动激光、碱金属气室、磁屏蔽装置、检测激光等部分。在自然状态下,电子和核子杂乱无章地分布,当原子外部有磁场和光场作用时,可以控制其中的电子产生自旋极化,极化的电子与核子碰撞使得核子发生自旋,由此产生了原子自旋效应。为使这一过程有定轴性,需要屏蔽外部磁场,减少外界磁场对其影响。当外界施加一个角速度,驱动激光固连在载体上并随着载体转动,原子受到驱动激光的控制会产生极化并且进动到驱动激光方向,由于其本身具有定轴性,电子和核子最终会产生一个偏离原方向的一个角度。检测激光也随着载体一起转动,当外界有一个角速度时,电子和核子产生一个偏移的角度,检测激光可以检测到这一角度。电子和核子的不同指向会使得检测激光的偏振方向发生改变,从而反映出原子自旋角度的变化,可以实现对角速度的测量。
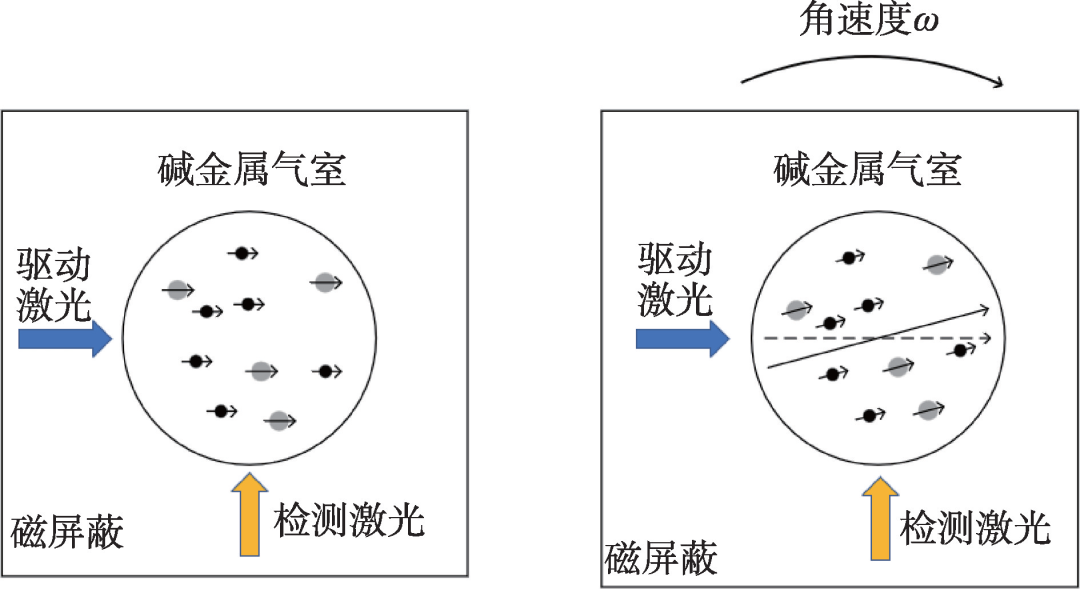
图8 原子自旋陀螺原理图
目前,原子陀螺仪处于实验样机阶段,还没有投入实际使用,但是其技术已经逐渐成熟,希望能够尽快实现工程应用,大大提高惯性导航的灵敏度。
5. 总结
不同类型的陀螺仪由于其工作原理和结构特性的不同,其精度、原理、成本也有所不同。随着物理学以及电子技术和计算机技术的发展,陀螺仪的精度、大小等也在随着军用、民用领域的需求不断进步,各类陀螺仪也在向高精度、低成本、高可靠性等方面发展。相信单向旋转陀螺DeltaCELT 的出现也会给新型陀螺的研制提供新的思路,并且陀螺中Feigenbaum常数的运用也给我们今后在陀螺研制的过程中提供了新的思维方法,在陀螺的设计中,我们也可以利用这些特殊的常数去设计,可能会有意想不到的效果。总之,不论是将其应用于导航还是其他的应用领域,相信更多的工程师会被这一“俏皮旋转”所启发,为我们的生活带来更大的便利。
编辑:黄飞
-
几种高精度陀螺仪的应用和分析2018-11-09 3088
-
陀螺仪的工作原理及创新应用2020-09-09 2920
-
陀螺仪的基本组成及工作原理2020-12-17 3763
-
陀螺仪工作原理以及不同种类陀螺仪之间的差异2021-08-06 3252
-
三轴陀螺仪工作原理_三轴陀螺仪原理图2017-10-26 48728
-
分析三轴陀螺仪的工作原理及应用2018-10-23 20520
-
陀螺仪的工作原理及性能特点分析2019-07-11 9877
-
光纤陀螺仪与旋转式陀螺仪的工作原理解析2019-10-10 9854
-
微机械陀螺仪工作原理_微机械陀螺仪的应用2021-02-01 14648
-
陀螺仪芯片的工作原理2021-12-10 18148
-
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别2023-08-21 9972
-
陀螺仪是什么?陀螺仪工作原理2023-10-08 9537
-
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用2023-12-07 6926
-
陀螺仪传感器工作原理2024-01-02 3990
-
振动陀螺仪传感器的工作原理2025-06-16 1753
全部0条评论

快来发表一下你的评论吧 !
