

一种柔软且可拉伸的电容式传感器
MEMS/传感技术
描述
能够辨别剪切力和法向力的软体传感器可以为机器提供所需的精细控制,以便与人进行安全有效的物理交互。
据麦姆斯咨询报道,近日,加拿大不列颠哥伦比亚大学(University of British Columbia)和日本本田技术研究院(Honda R&D Co., Ltd)的研究人员组成的团队在Scientific Reports期刊上发表了题为“Touch, press and stroke: a soft capacitive sensor skin”的论文,提出了一种柔软且可拉伸的电容式传感器,可用于感知接近度、法向力和剪切力。
该论文所提出的传感器由图案化的弹性体组成,包含固定支柱和滑动支柱,可使传感器像皮肤本身一样变形和褶皱。该软体传感器利用四个可变形电容器信号的求和求差来区分同时施加的法向力和剪切力。剪切力与法向力之间的串扰小于2.5%,剪切轴之间的串扰小于10%。法向应力和剪切应力灵敏度分别为0.49 kPa和0.31 kPa,最小位移分辨率为40 μm。此外,手指接近度的探测范围可达15 mm。操作演示在一个简单的夹持器上进行。这些特点和简单的制造方法使该传感器成为人形机器人应用中类皮肤的候选器件。
提出的软体传感器和工作原理如图1所示。一组五个独立连接的电极用于电容式传感,使施加到传感器表面的位移和力能够在3个维度上解析。四个顶部传感电极(E1–E4)电容耦合到一个底部接地电极,如图1A所示,形成电容C1–C4。顶部和底部电极通过直接穿过电介质(X1)和向外突出(X2)的电场进行耦合,如图1B所示。AD7745电容数字转换器和多路复用器被用于依次测量每个顶部电极和底部参考之间的电容。这些电容的变化取决于激励的性质。
人的手指靠近或轻微触碰传感器时,会起到虚拟接地的作用,并使投射电场(图1B中标记为X3)解耦,从而以类似的方式降低所有电容C1–C4。施加压缩力后,四个顶部有源电极E1-E4都会向底部电极移动,从而使所有四个电容C1-C4(图1C)增加。沿向右方向施加剪切力会使E3向右移动,增加与底部电极的重叠面积,进而增加C3。E1也将向右移动,减少与底部电极的重叠面积,进而减少C1(图1D)。该轴上的剪切力对C2和C4的影响很小,因为它们与底部电极的重叠面积没有改变。C1-C4的这种变化组合是正x轴剪切的特征,并提供了有关剪切大小及其方向的信息。
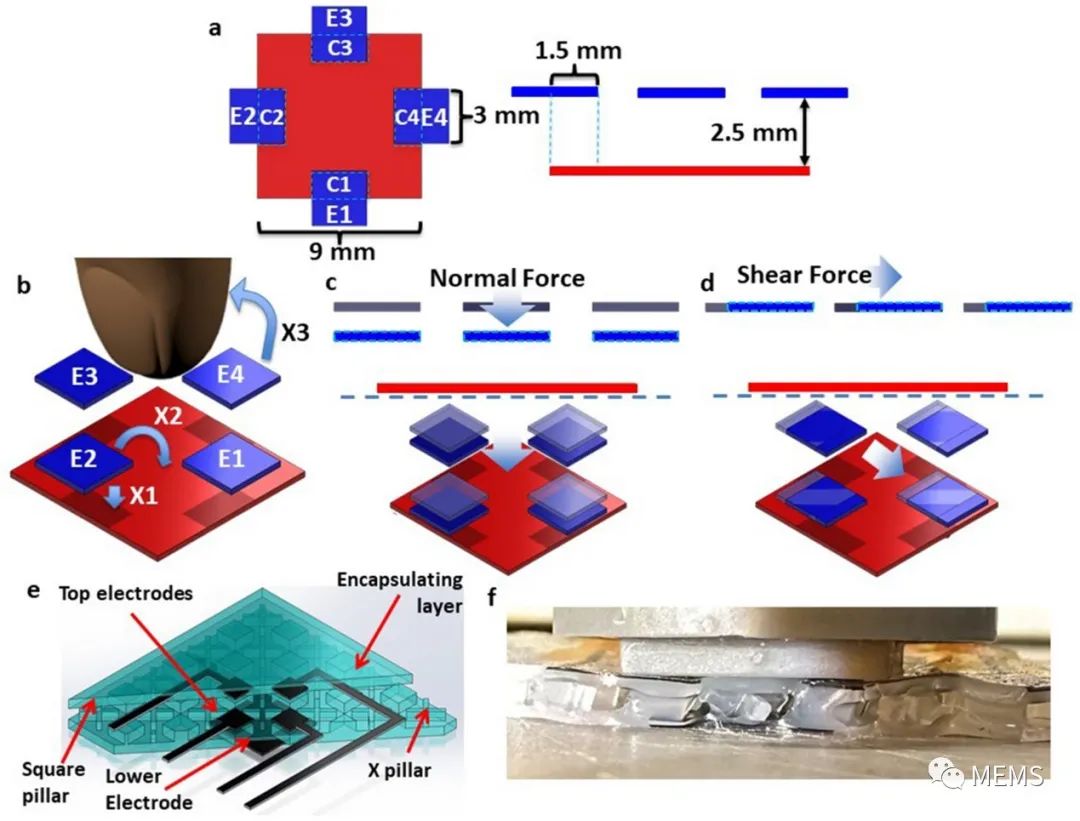
图1 软体传感器及工作原理
研究人员选择成本低且适合大规模量产的材料和方法制造该软体传感器。一种简单的模具-图案化-粘合(MPB)三步骤制造方法如图2A-2D所示。
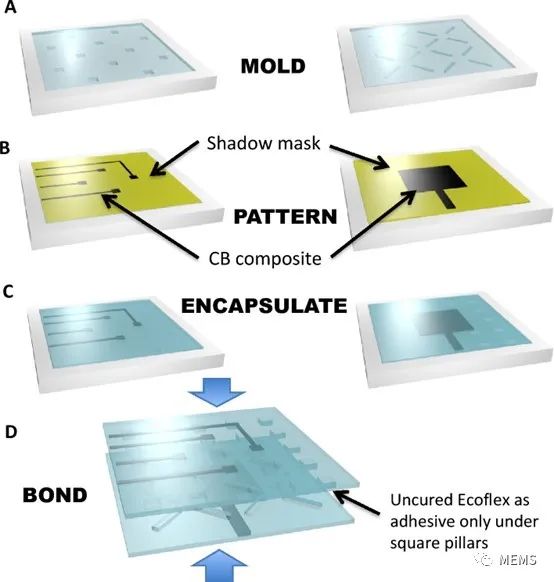
图2 软体传感器的制造步骤
软体传感器的应力-应变图如图3A所示,表明在小应变下有效弹性模量E1较低,而在较大应变下有效弹性模量E2较高,类似于人类皮肤。图3B-3E展示了传感器对不同激励的响应。
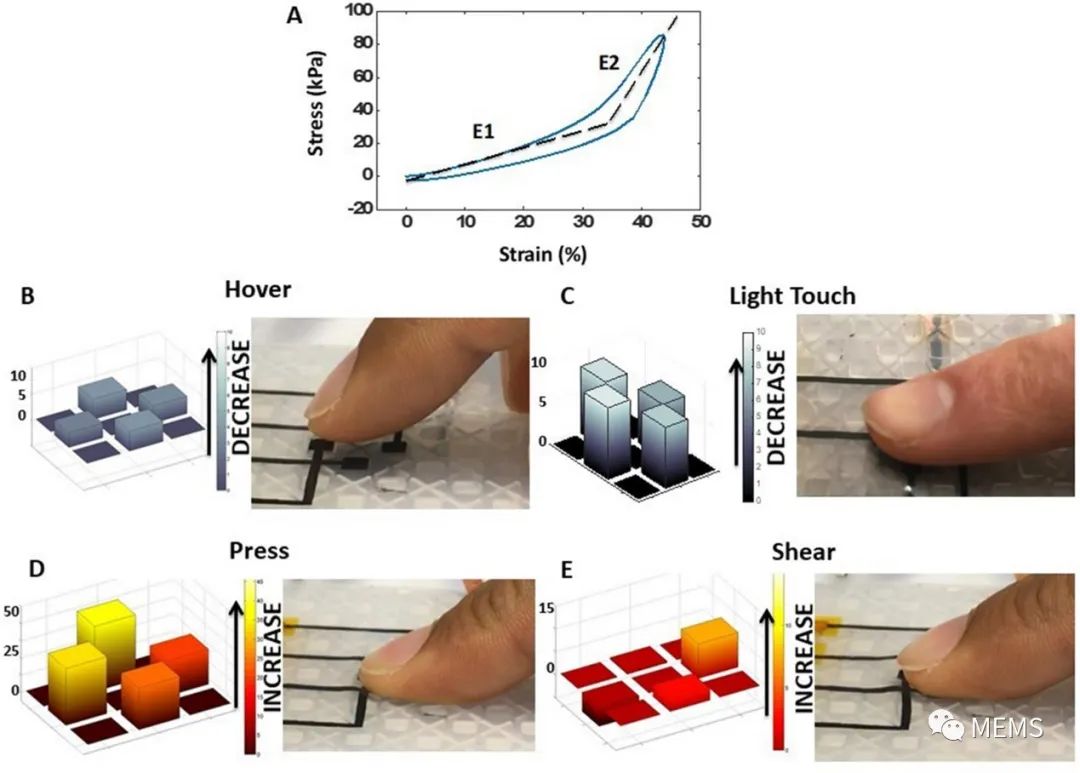
图3 软体传感器对不同激励的响应
研究人员对软体传感器进行了表征,结果如图4所示。
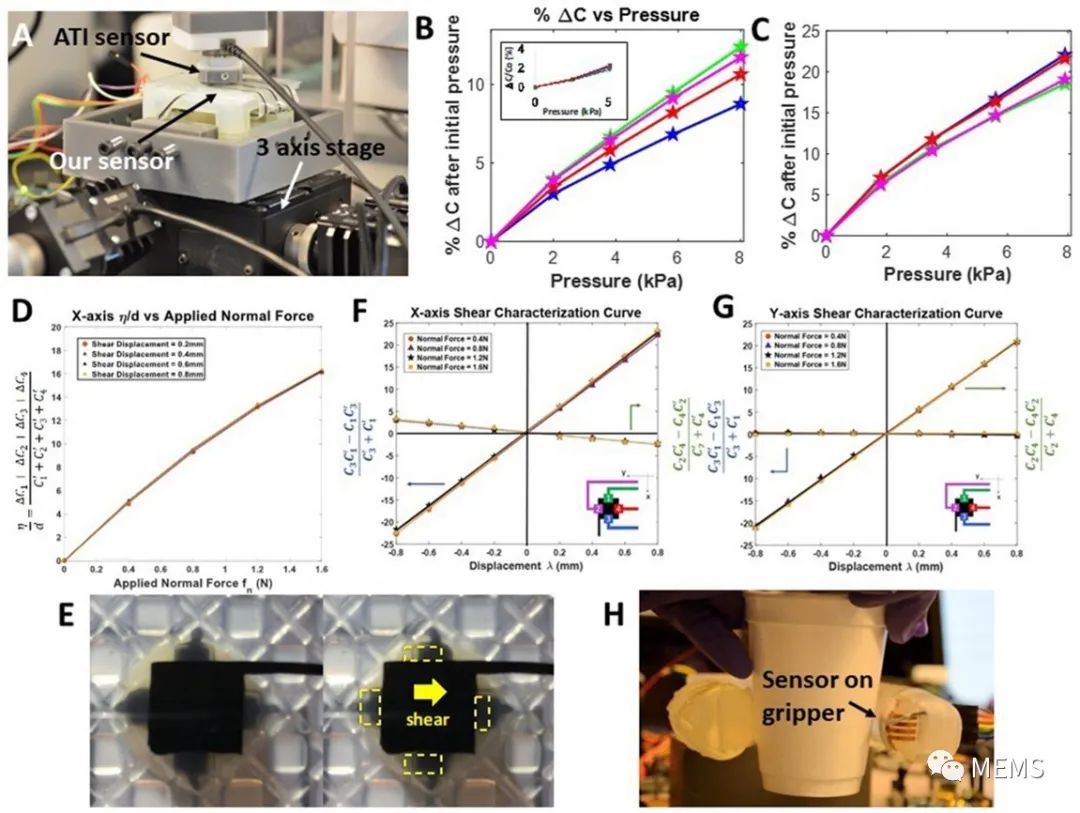
图4 软体传感器的表征
研究人员还对传感器的物体接近特性进行了表征,传感器对手指从最大距离为15 mm处接近的响应如图5A所示,接近的手指如图5B所示。
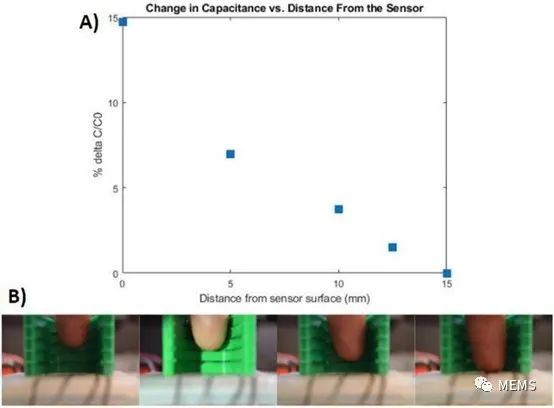
图5 软体传感器的接近特性表征
综上所述,所提出的软体电容式传感器可通过基于电容信号的求和或求差来区分法向力和剪切力,并具有方向辨识能力。它还支持接近度探测,并具有类似皮肤的特性。正如Ham等人所探索的那样,通过使用不同固有刚度的材料以及通过改变特征的几何形状和尺寸可以提高探测灵敏度,从而有望实现更小和/或更软、更高分辨率的传感器,以及更大和/或更硬、更高力版本的传感器。
传感器开发的下一步工作包括将传感器与控制耦合,以实现对精细物体的操纵。此外,研究人员有望制造和测试传感器阵列,以形成完整的皮肤,并实现大面积皮肤传感。在这一领域的成功探索有望使机器人和假肢能够更有效地与其环境互动。
编辑:黄飞
-
电容式传感器的分类及原理2010-11-29 21577
-
浅谈电容式位移传感器的优势2016-01-31 5211
-
一种新型的电容式料位传感器设计2009-06-24 1139
-
一种新型的可拉伸硅集成电路2008-07-29 1619
-
实验:电容式传感器2009-03-06 8879
-
伦敦帝国理工学院制造出了可拉伸的挤压式软传感器设备2020-09-22 2920
-
电容式传感器的工作原理以及电容式传感器的特点2020-12-18 51765
-
电容式传感器的优缺点及分类2021-08-11 21788
-
电容式水位传感器有哪些优点2023-05-08 3000
-
电容式液位传感器-选型表2022-11-18 2468
-
一种可实现稳定压力传感的新型可拉伸电子皮肤2024-05-09 1696
-
柔软可拉伸的新型3D打印材料可改善可穿戴传感应用2024-07-08 12687
-
电容式传感器分为几种类型?其工作原理分别是什么?2024-07-22 9607
-
电容式压力器分为哪三种2024-08-07 2640
-
电容式传感器的测量电路有哪些?2024-08-29 5249
全部0条评论

快来发表一下你的评论吧 !
