

西门子S7-1500如何批量读取和写入机器人信号
电子说
1.4w人已加入
描述
方法一
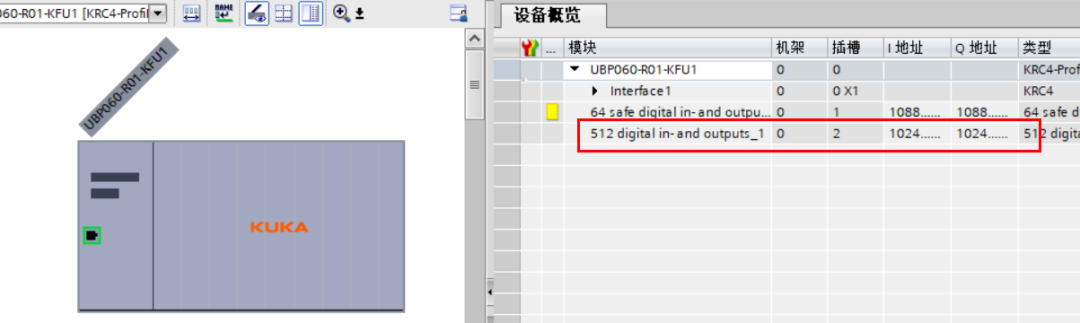
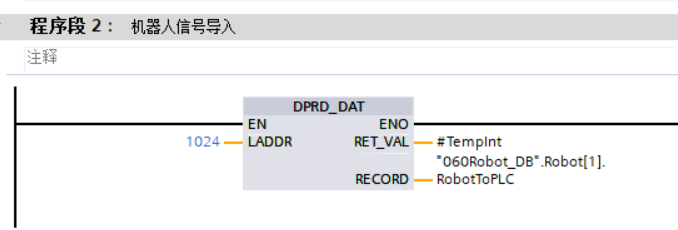
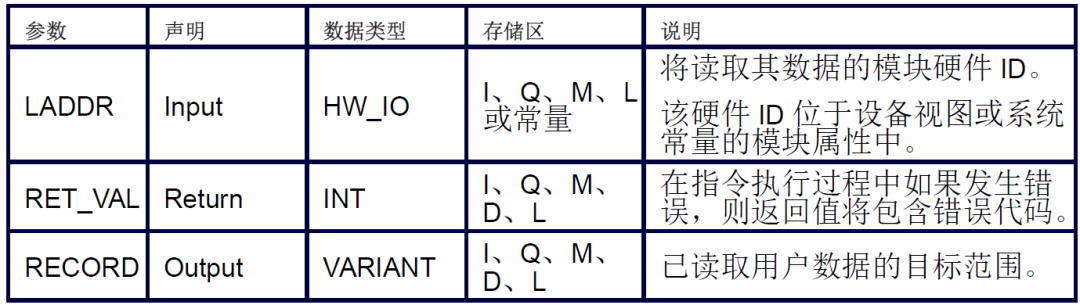
DPRD_DAT:读取 DP 标准从站的一致性数据
该指令适用于中央模块以及 DP 标准从站和 PROFINET IO 设备。
可以使用以下数据类型:BOOL,BYTE,CHAR,WCHAR,WORD,LWORD,DWORD,INT,UINT,USINT,SINT,LINT,ULINT,DINT,UDINT,REAL,LREAL。在类型为 ARRAY 或 STRUCT 的数据结构中也可使用这些数据类型。
o 不支持数据类型 STRING 和 WSTRING 。
o 支持 PLC 数据类型 (UDT) 和系统数据类型。
• 如果在数据传输过程中未发送任何错误,则所读取的数据将输入到参数 RECORD中所定义的目标范围内。
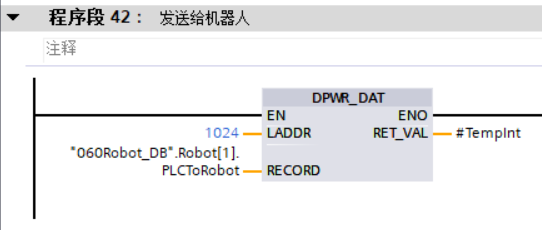
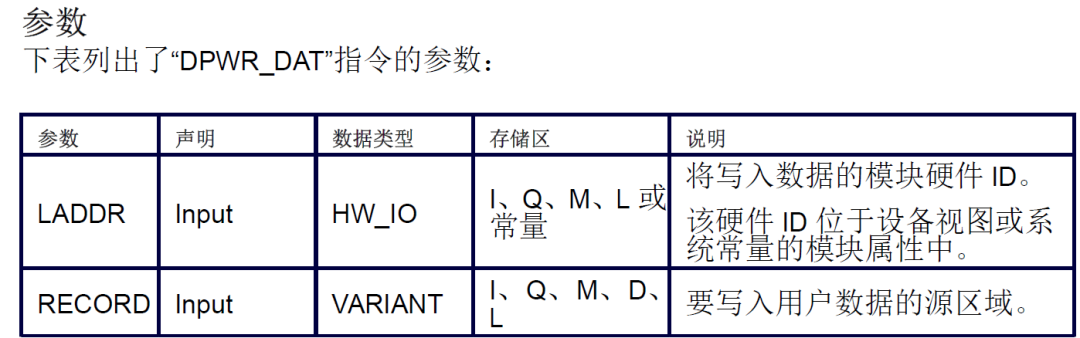
DPWR_DAT:将一致性数据写入 DP 标准从站
通过指令“DPWR_DAT”可将参数 RECORD 中的数据保持一致地传送到中央模块或DP 标准从站/PROFINET IO 设备的寻址模块中,必要时还可传送到过程映像中(例如,受影响的 DP 标准从站地址范围与过程映像中地址范围相同时)。

方法二
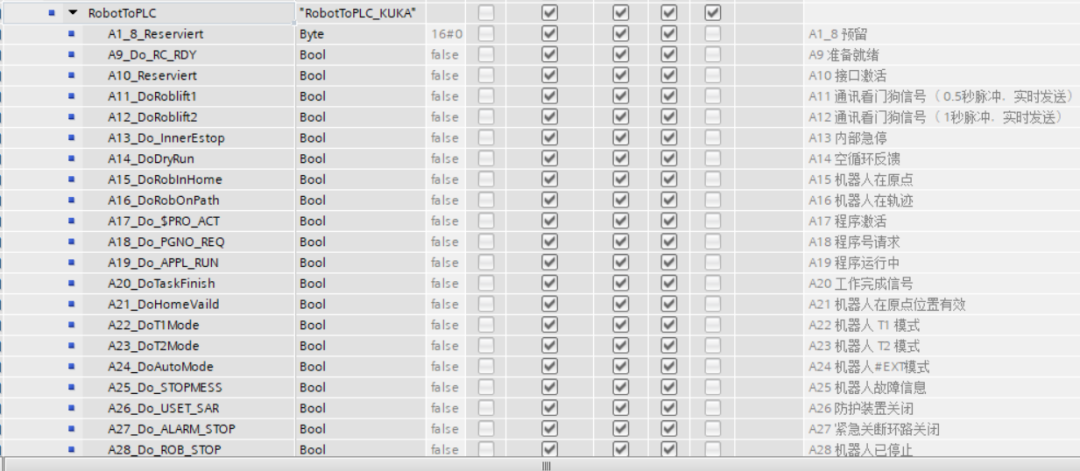
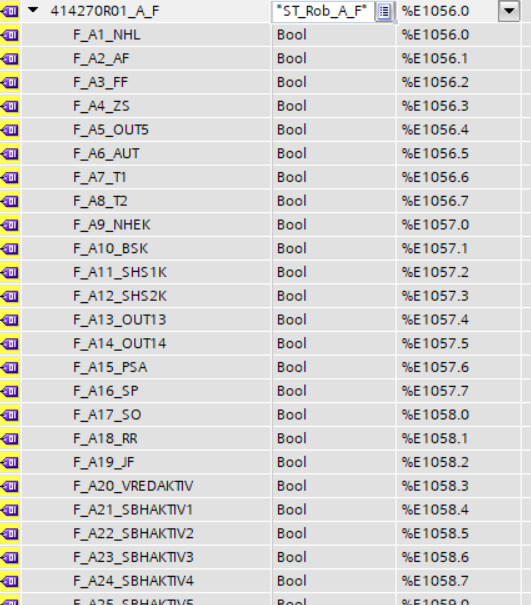
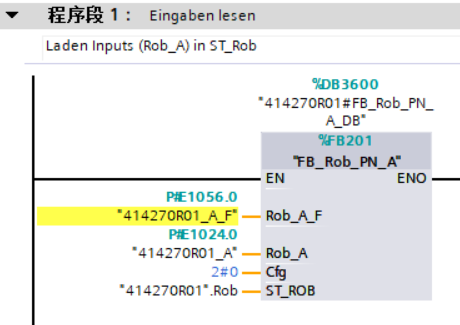
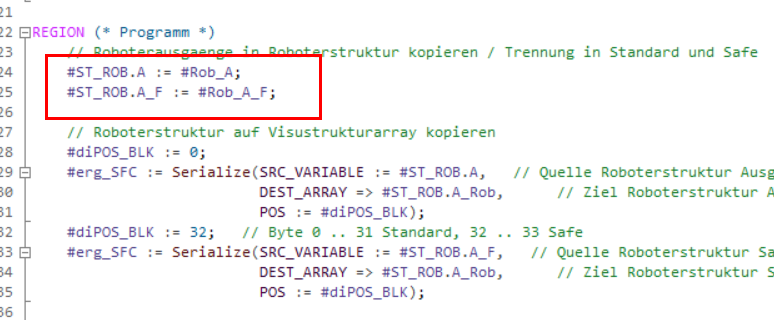
读取机器人信号
PLC变量表里直接通过UDT数据类型:ST_Rob_A 直接批量读取
![]()
安全信号批量读取
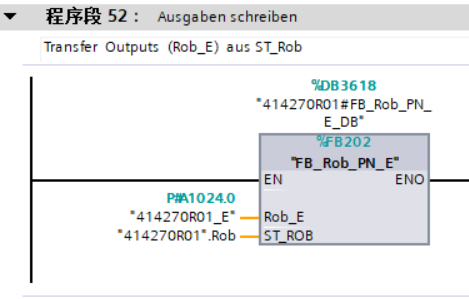
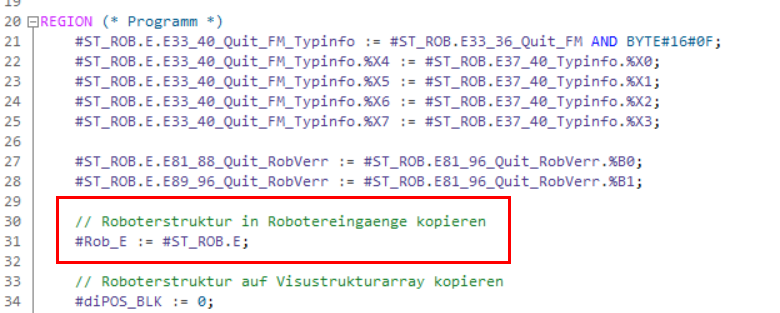
发送机器人信号:
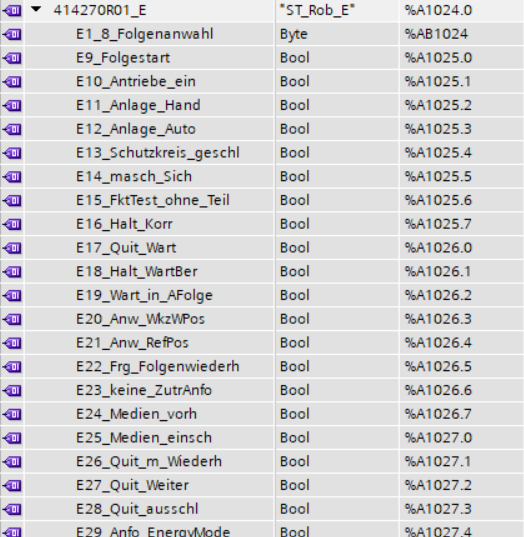
变量表 通过UDT:ST_Rob_E
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
雅马哈机器人配置方法之西门子S7-1500控制技巧分享2020-04-27 17585
-
西门子S7-1200 和 S7-1500 的编程指南pdf下载2018-03-27 9284
-
西门子S7-1500凭什么秒杀S7-300/400?2018-04-27 27101
-
西门子S7-1500系列PLC控制的6轴机器人系统解析2020-03-29 11625
-
西门子S7-1500 PLC的入门指南资料免费下载2020-06-02 2656
-
西门子S7-1500与分布式IO设备的诊断2021-02-11 16518
-
西门子S7-1500和ET200系列Eplan宏文件2022-07-31 4282
-
西门子S7-1200和S7-1500编程风格指南2022-08-17 1630
-
西门子S7-1500如何批量读取和写入机器人信号2022-08-30 7647
-
工业网关BL110实现西门子S7-1500 PLC接入Modbus TCP Server云平台2022-10-28 2469
-
西门子PLC,SIMATIC S7-1200和S7-15002023-04-24 2619
-
西门子PLC S7-1500系列的工艺模块说明2023-04-27 6232
-
西门子S7-1500与PC机的OPC通讯组态2023-05-18 11465
-
西门子S7-1500 DI模块使用方法分享2023-08-24 8549
-
西门子PLC S7-1500系列介绍2024-12-09 5723
全部0条评论

快来发表一下你的评论吧 !
