

博世推出全新高精度惯性测量单元SMI270
MEMS/传感技术
描述
随着智能驾驶技术的发展,高精度定位成为推动自动驾驶应用的关键要素之一。实现L2+级别的自动驾驶体验需要根据不同场景和精度要求选择适合的硬件。
其一,对于城市道路的行驶场景:可利用环境感知传感器,如激光雷达和摄像头,结合高精度特征地图,实现车辆的精确定位,使得车辆能够在城市道路中规划最佳路径,避免障碍物,确保驾驶安全。
其二,对于开阔路段的行驶场景:可通过全球导航卫星系统(GNSS)实时获取卫星信号,再结合实时差分定位(RTK)服务,进行误差补偿和校准,实现车辆的精确导航。
然而,车辆在这两种场景的自动驾驶过程中均存在一定风险:环境传感器受天气和遮挡物影响,而在某些区域(如隧道和高层建筑区域),GNSS无法提供准确的定位信息。
随着惯性测量单元IMU(inertial measurement unit)技术的不断突破,传统高精度定位方案存在的风险逐渐得以规避。
IMU 的核心零部件为陀螺仪和加速度计。
陀螺仪用以获取运动体的角速度并测量其角度变化,加速度计用以获取运动体的线性加速度并测量其速度变化。
惯性导航解算软件通过积分运算、姿态矩阵计算等方法,计算出地理坐标系下运载体的速度、位置和姿态。
作为惯性导航系统INS(inertial navigation system)中的核心器件,IMU不受外界环境影响,根据惯性数据为现有技术补充关键数据,得以实现系统高精组合导航。
博世全新高精度惯性测量单元SMI270使用小型LGA封装 5 x 5 x 1.45 mm,内部集成三轴陀螺仪和三轴加速度计,符合车规级AEC-Q100 Grade1,为系统提供高精度和高可靠性的惯性测量数据。
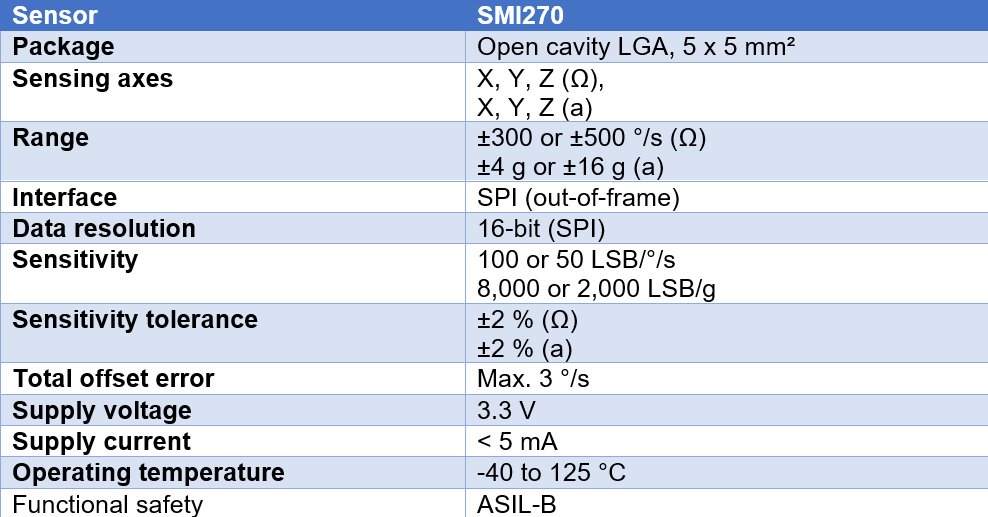
SMI270主要参数
博世SMI270完全按照ISO26262:2018 标准开发,内部集成功能安全控制器(SCON),可对芯片近100个内部信号进行实时监控并提供16位数据长度的加速度和角速度信号,适用于系统满足ASIL-B等级功能安全要求的L2+的自动驾驶等应用。

功能安全数据
SMI270集高性能和高集成度于一体,不仅能实现6轴惯性测量,还完美实现了低噪声和高稳定性的统一:陀螺仪噪声控制在± 0.1 °/s、加速度计噪声低至± 2mg的同时,Allan 方差指标陀螺仪 5 °/h、加速度计 < 50 ug,再车辆运行中始终能保持精确稳定的数据输出。同时相比于传统塑封惯性IMU,SMI270凭借全新的金属Open-cavity LGA封装,提升了振动鲁棒性和降低了环境和温度对于传感器性能的影响。
作为MEMS传感器技术的领军企业,博世拥有突破性的“博世双沟槽工艺”和1000多项专利技术。
凭借领先的MEMS技术和深厚的车用系统的开发经验,博世一直致力于为客户提供高性能、高质量的产品和专业的服务支持。在智能驾驶技术的发展中,博世始终走在前沿,引领行业发展和进步。
编辑:黄飞
-
贸泽电子推出Bosch的BMI270 智能惯性测量单元(IMU)2019-08-28 3302
-
推荐一个好用的高精度MEMS惯性测量单元2024-01-18 1464
-
3DM-GX5-15 惯性测试单元IMU2020-12-07 838
-
凌华科技推出全新高精度系列多功能数据采集卡,动态性能提高102008-08-12 1227
-
惯性测量单元的应用-惯导专题2020-04-26 1526
-
LPMS-BE2是一款低成本、高精度的6轴惯性测量单元2022-06-22 1276
-
博世全新高精度惯性测量单元SMI240为系统提供高精度和高可靠性2022-08-17 4077
-
凌思科技宣布量产高精度汽车级MEMS惯性测量单元2023-07-14 1078
-
IMU MEMS惯性测量单元的应用2024-01-19 4099
-
M-G330PDG惯性测量单元:精准控制与智能应用的核心2024-05-30 1167
-
爱普生惯性测量单元M-G370PDF可广泛用于各工业领域2025-03-06 1008
-
博世推出首款高性能六轴惯性传感器2025-07-17 1924
-
Bosch博世推出惯性测量单元BMI4232026-02-10 752
-
M-G366PDG IMU模组高精度惯性测量单元抗振性能优异2026-03-06 1234
-
高性能MEMS惯性测量单元,精准导航新标杆2026-06-02 143
全部0条评论

快来发表一下你的评论吧 !
