

步进电机是如何工作的?
工业控制
描述
前言
如图所示,用机器来画图
问题来了,它怎么知道该如何画?
或许有人会说:编程啊!
没错就是编程(可以是C,C++,python)
然后步进电机驱动器将程序转为一系列脉冲信号来控制步进电机转动

为什么用步进电机来画画呢?
因为步进电机的旋转能精确到1.8°之差,能旋转到特定的角度
正因为这个特性,用步进电机来画画就很准确,不仅如此,在自动化设备中大部分采用的也是步进电机
下面,具体来展开说说步进电机是如何工作的?
什么是步进角?
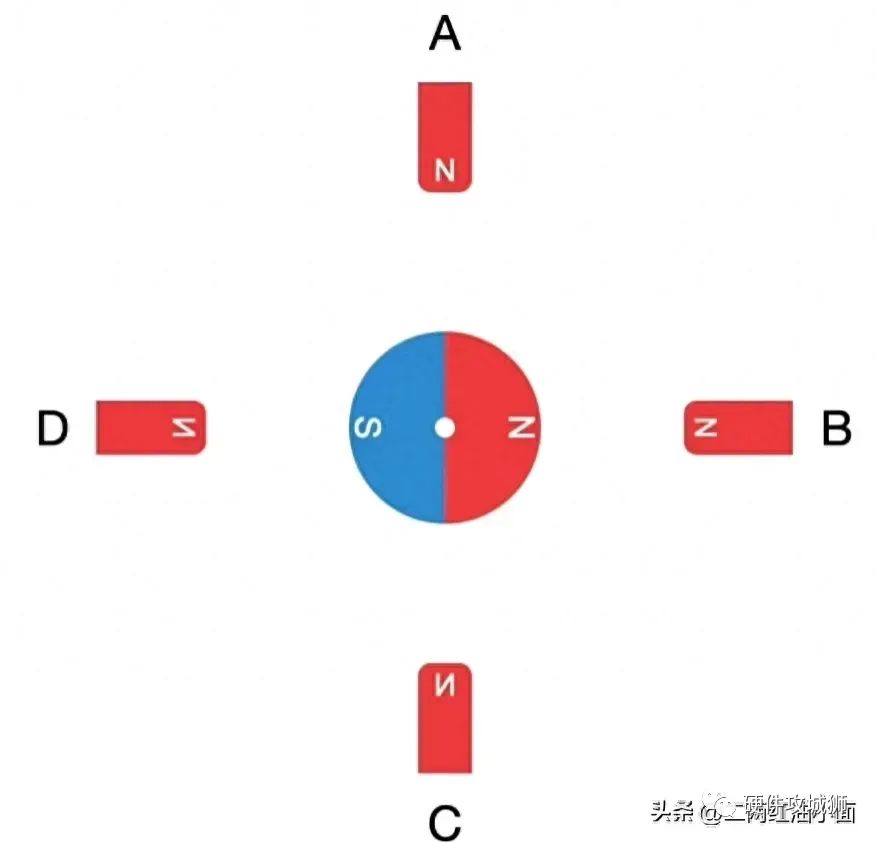
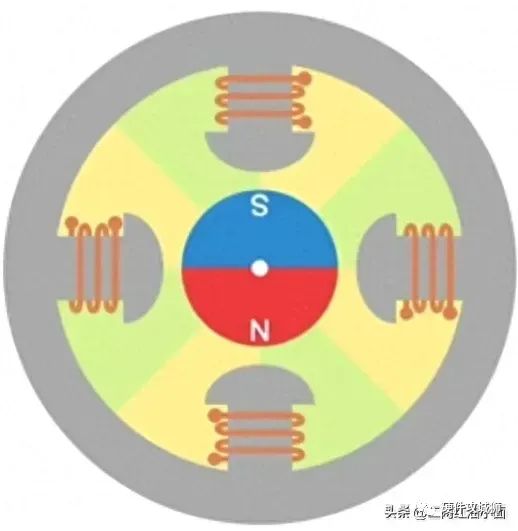
现在将4块磁铁摆成十字,并在其中放入一块NS永磁体,如图所示
现在将A磁铁靠近永磁体,就会用磁铁发现旋转90度
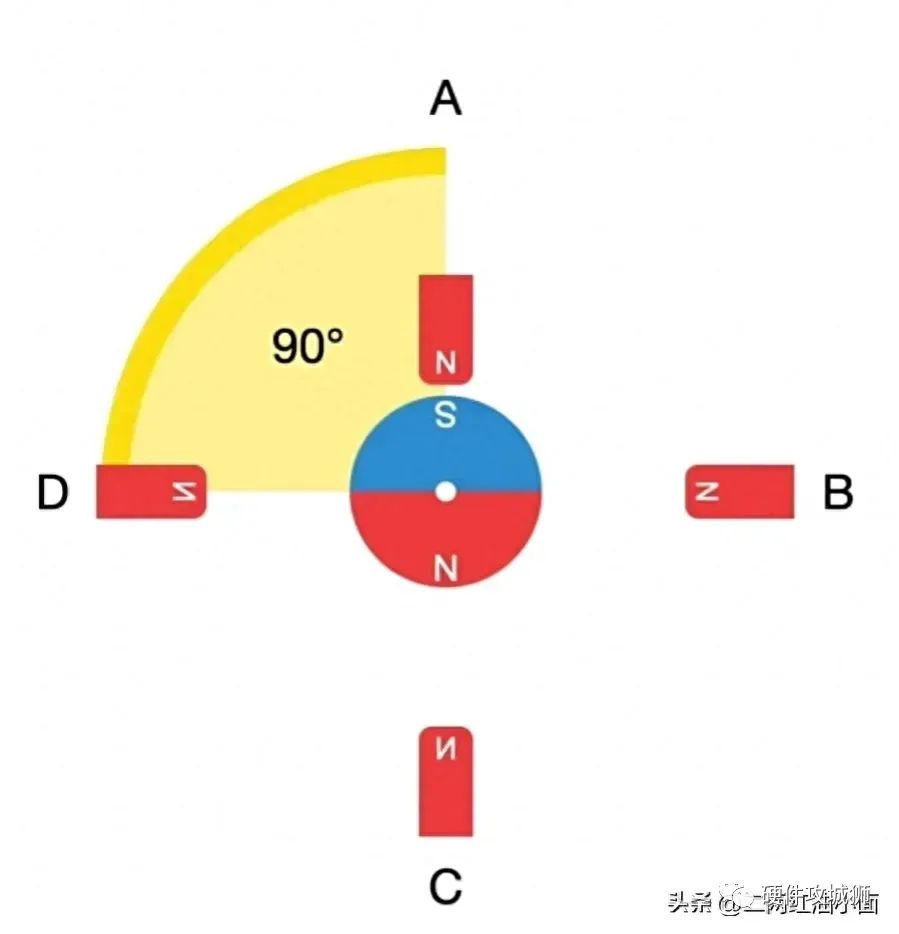
同样的,释放A磁铁,让B磁铁靠近永磁体也会旋转90度
这样如此往复旋转一圈,步进角为90度
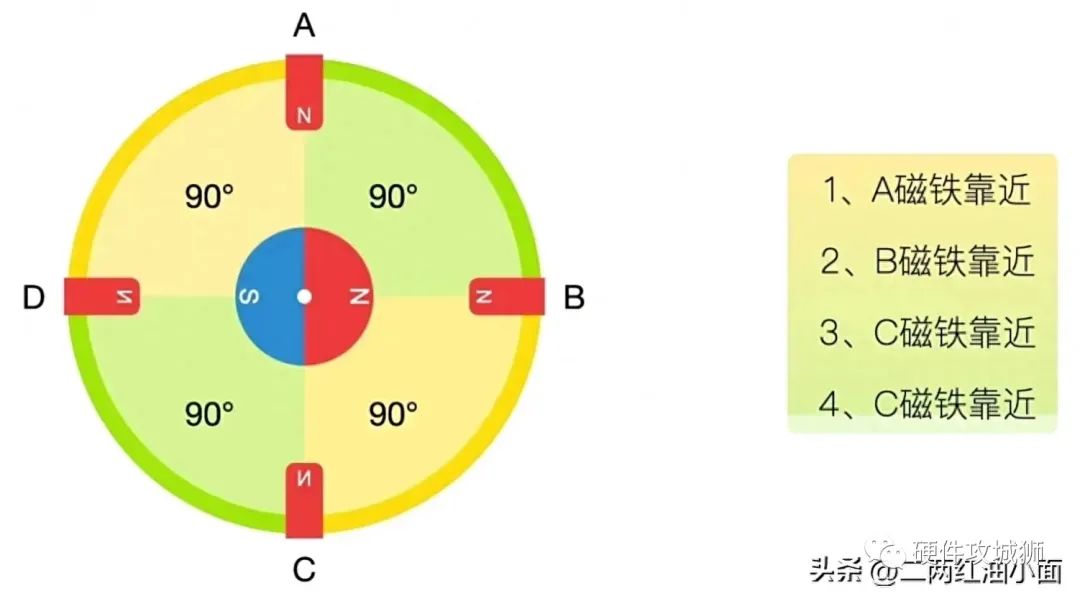
但是这90°的步进角太大了(只能确定4个方位),根本不能旋转到特定的位置
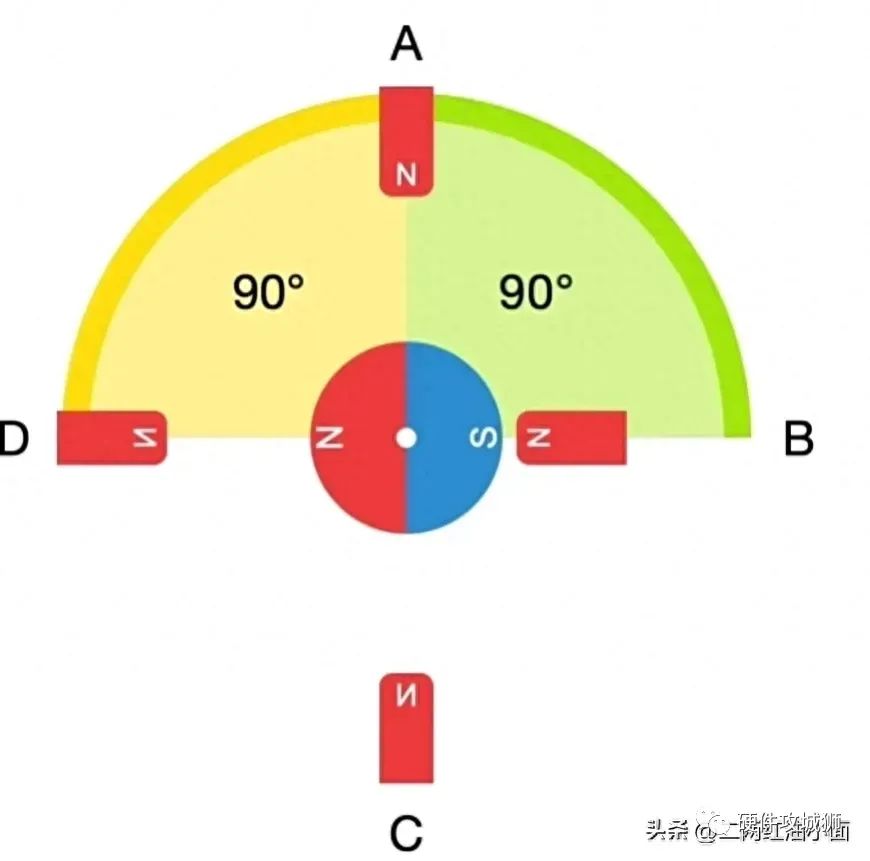
现在将AB磁铁同时靠近永磁体,这样永磁体为了保持平衡就会旋转45°
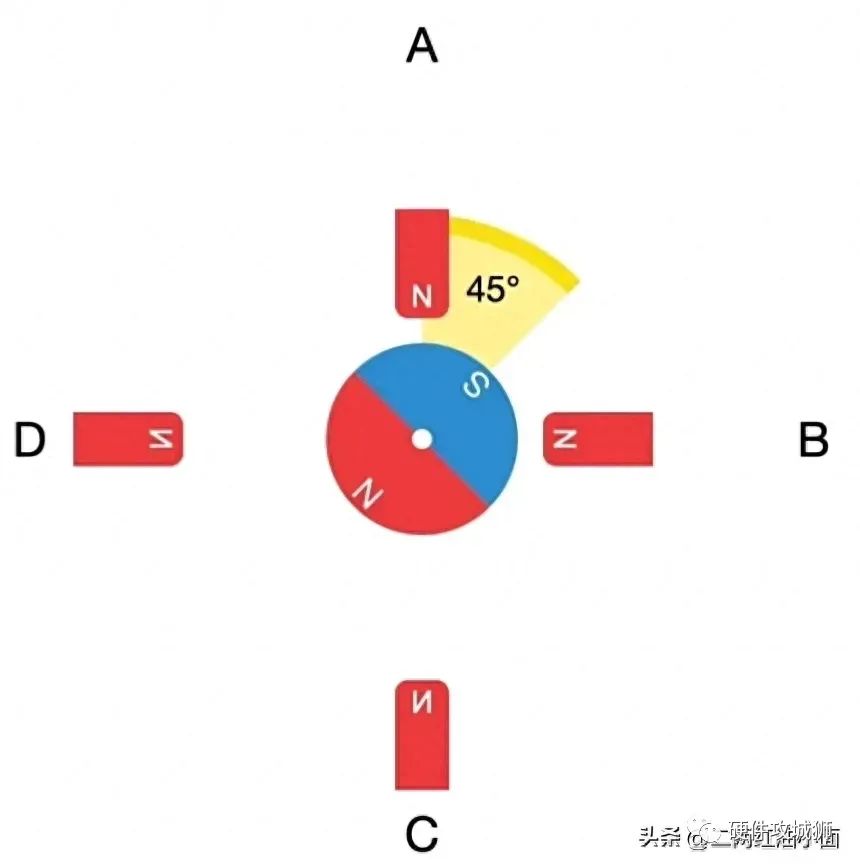
现在将A磁铁释放,永磁体将会在旋转45°
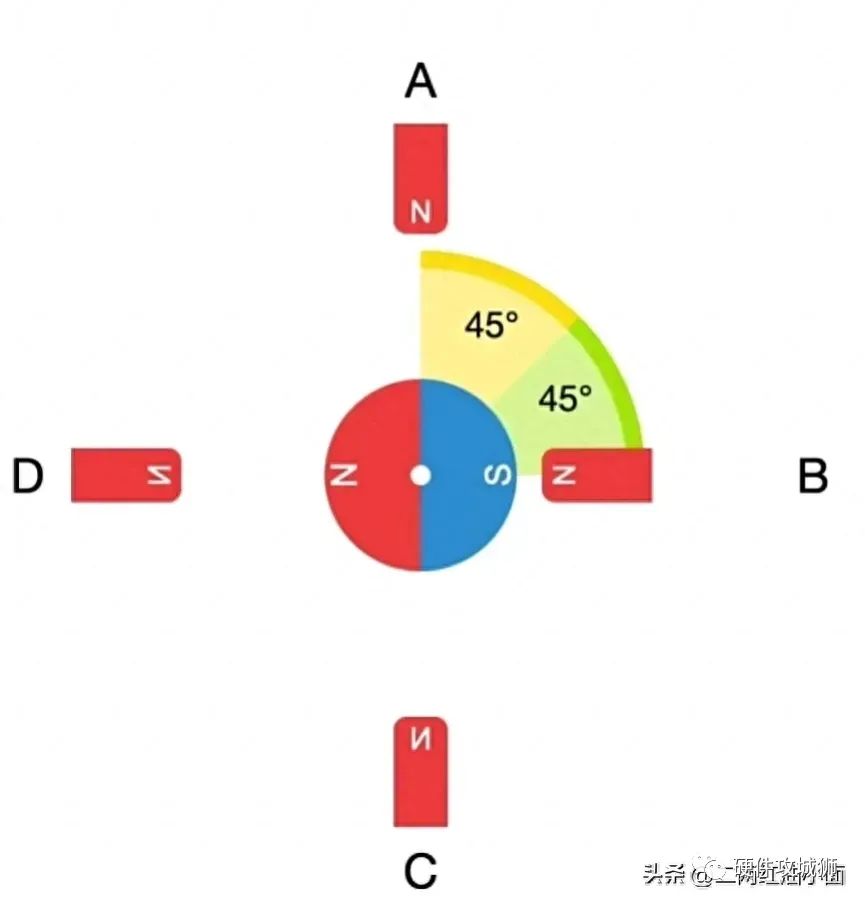
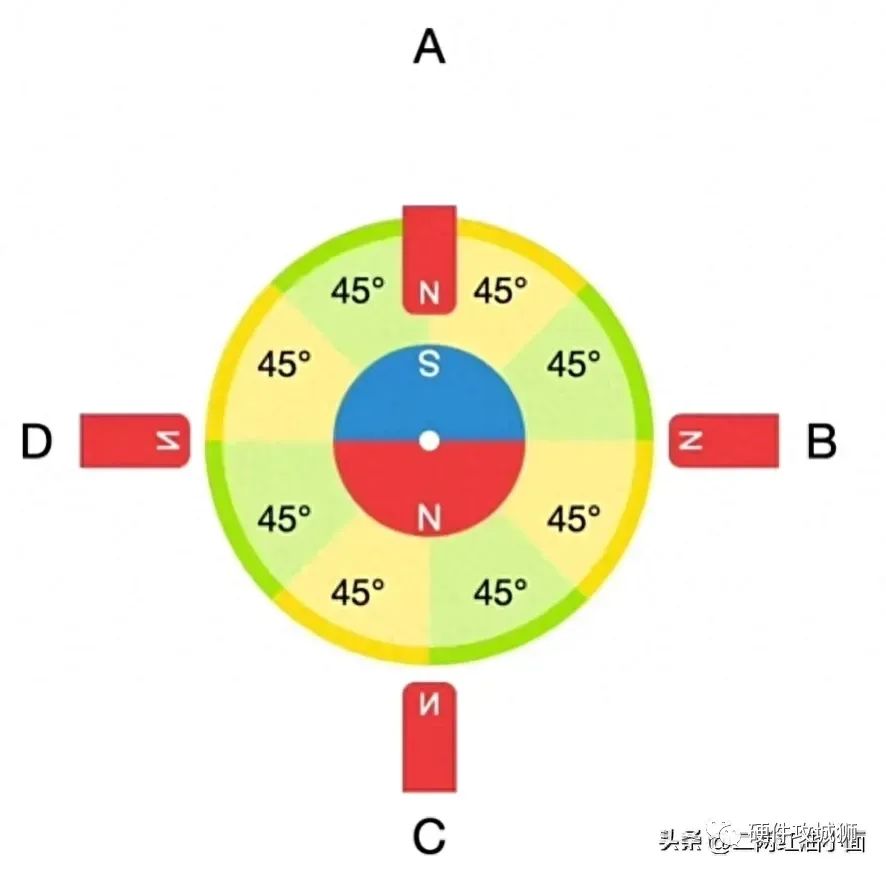
通过这样的方式,步进角就变成了45°(可以确定8个方位)
现在用线圈来代替磁铁(这样就可以通过改变电流的方向及强度来控制磁场)
为什么旋转能精准呢?
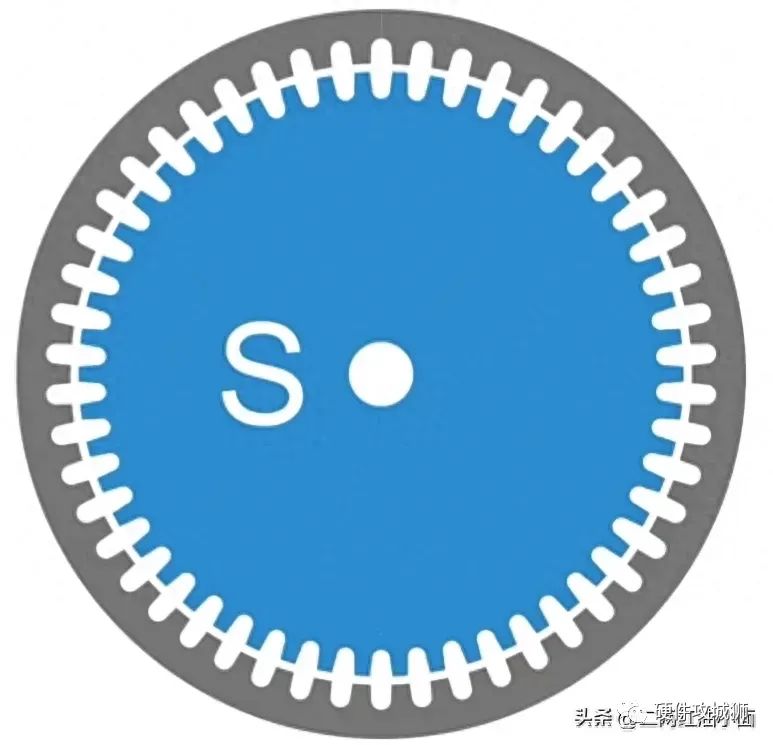
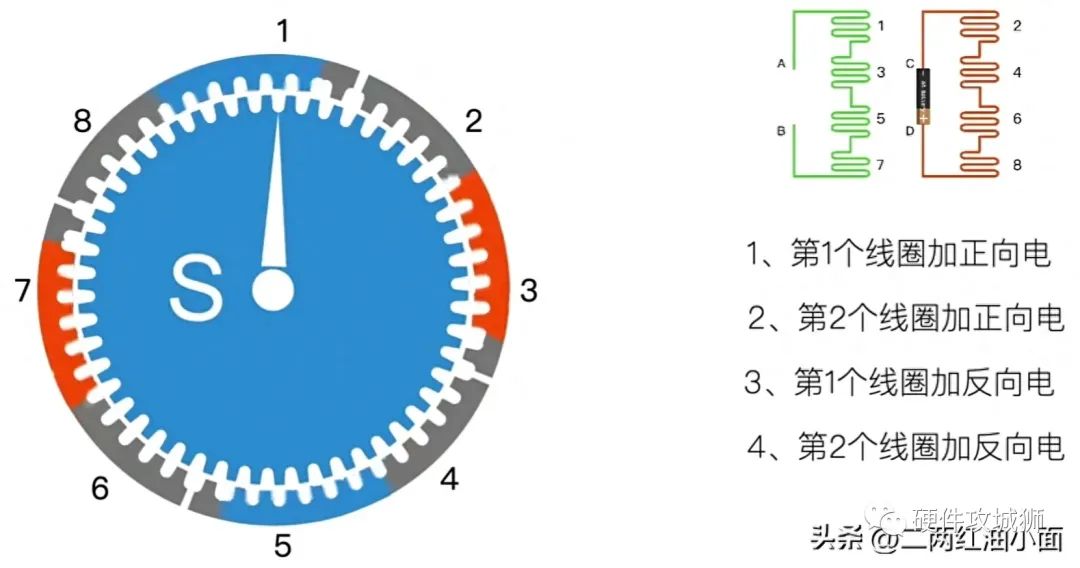
假如转子是S极并50个齿轮,定子也是50个齿轮
现在将定子去掉2个齿轮为48个齿轮(每6个齿轮为一组,一共有8组)
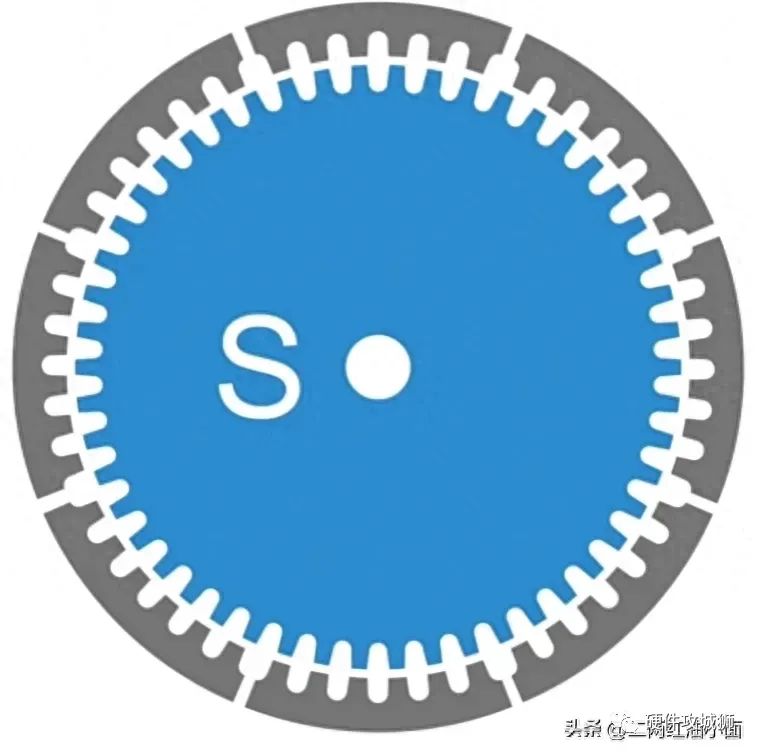
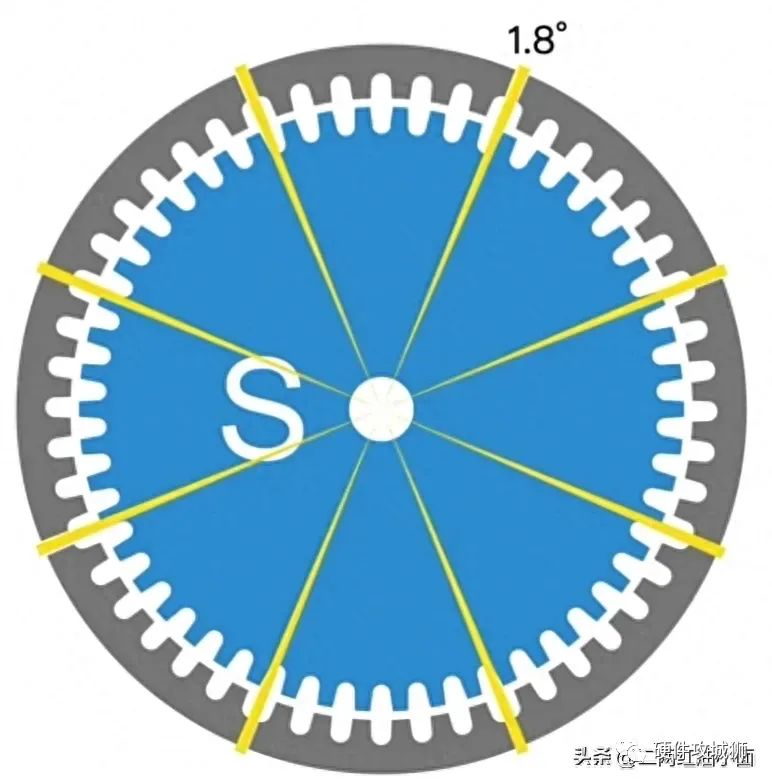
可以看出每一组的间距为1.8°
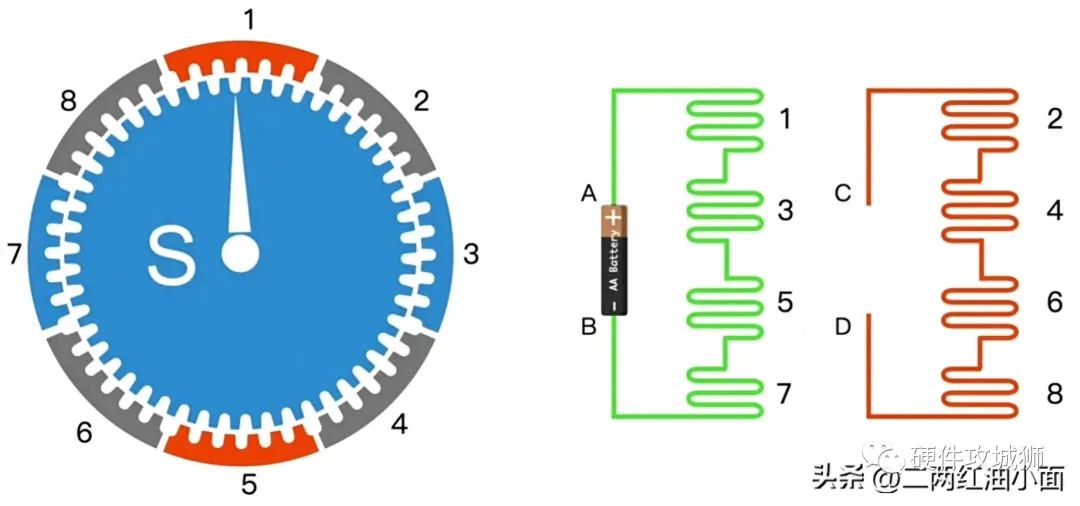
可以看出每一组的定子都与外壳固定了,并且每个线圈分别缠绕是四个定子(十字形),最后引出了两根线圈(1357为第一个线圈,2468为第二个线圈)
注意:15和37的磁性是相反的,26和48的磁性也是相反的
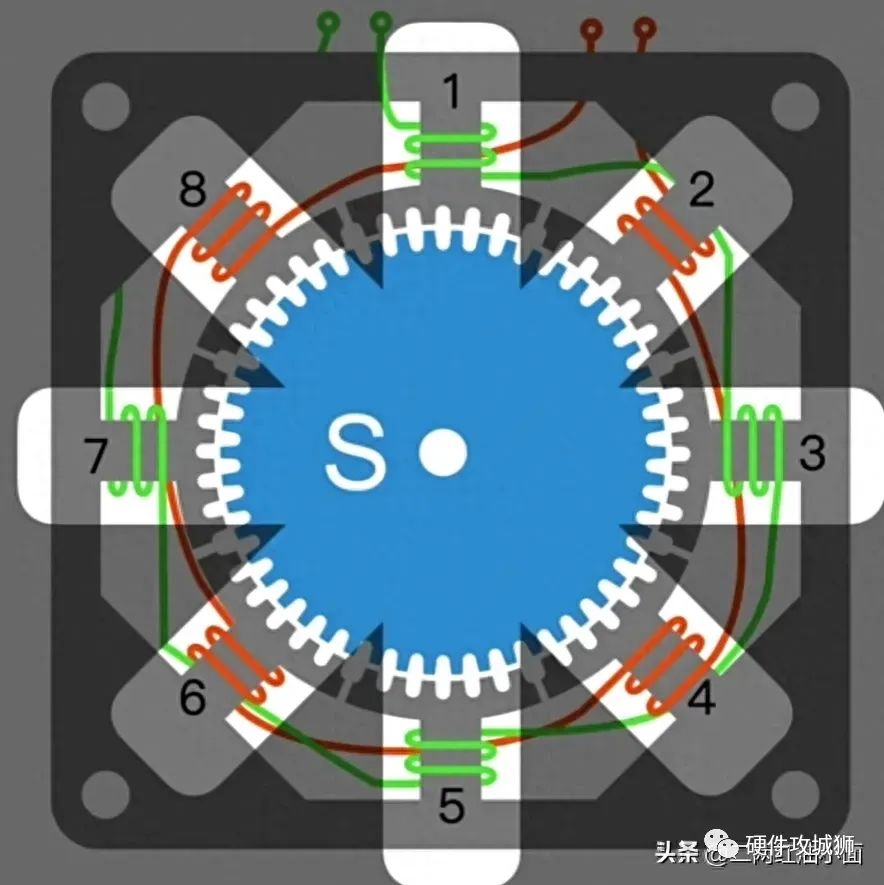
当第1个定子与转子对齐时
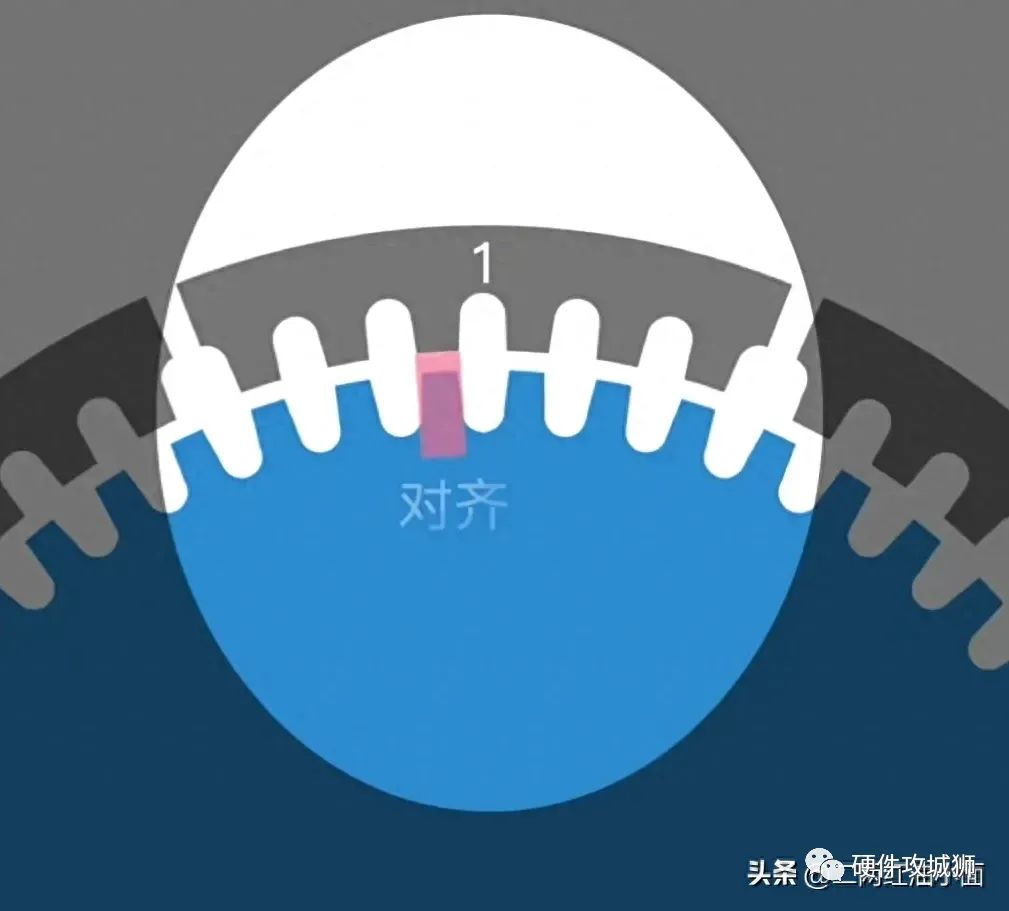
第2个定子与转子相差1.8度
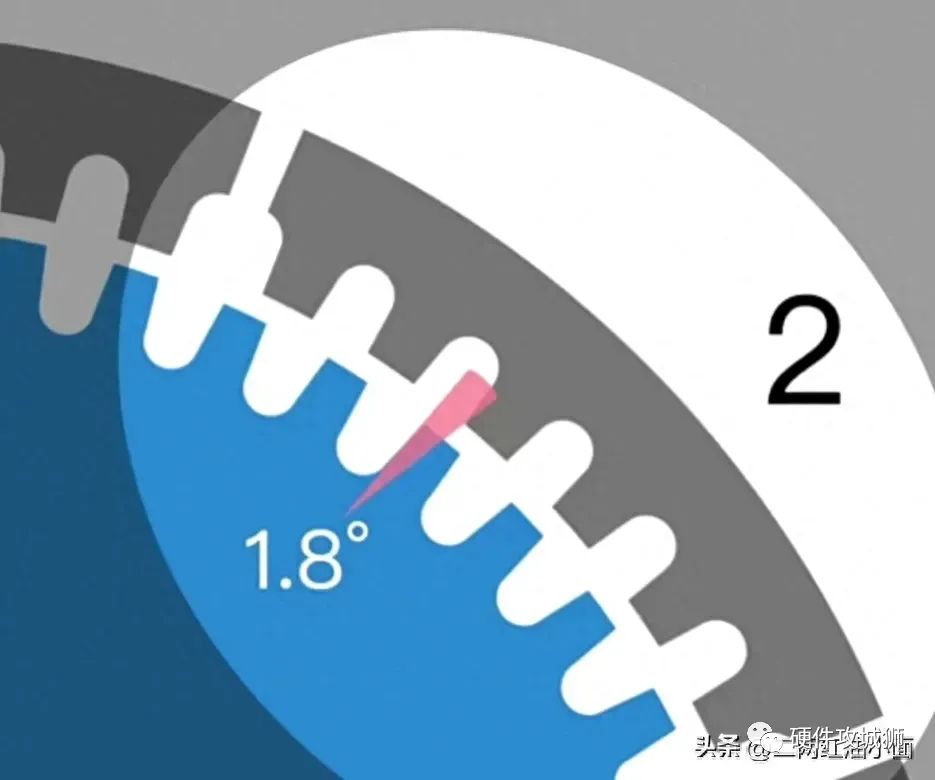
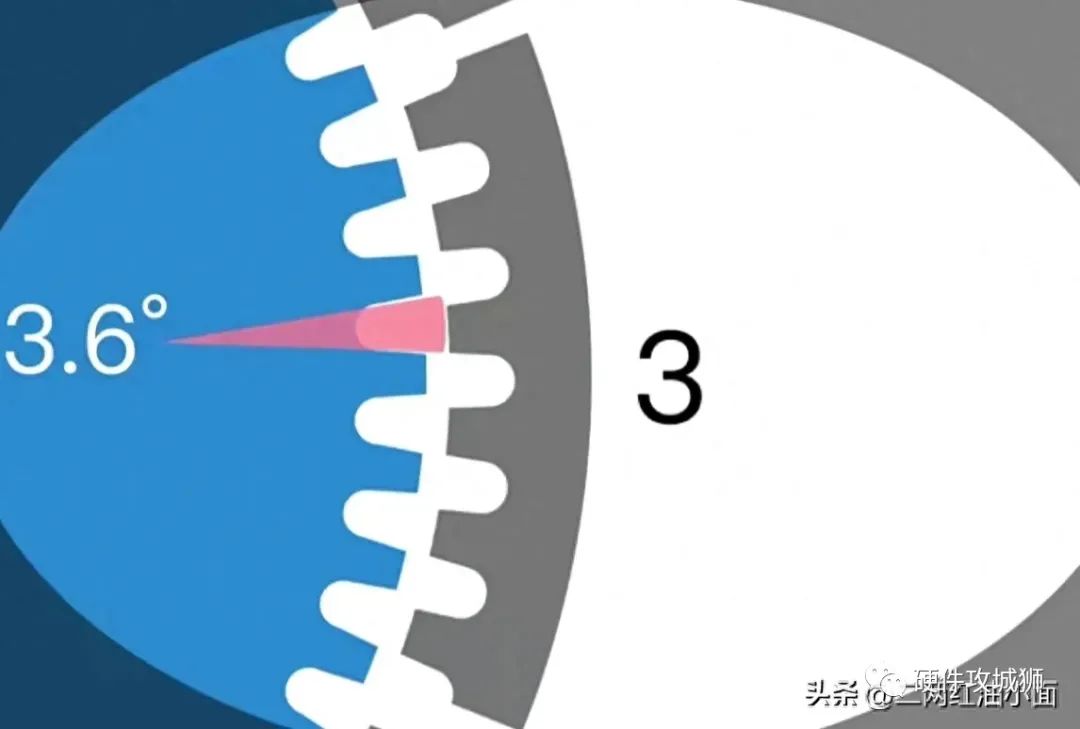
第3个定子与转子相差3.8度,后面的以此类推累加1.8度
①:给第1个线圈正向通电时,1号和5号定值为N极,吸引转子转动1.8°
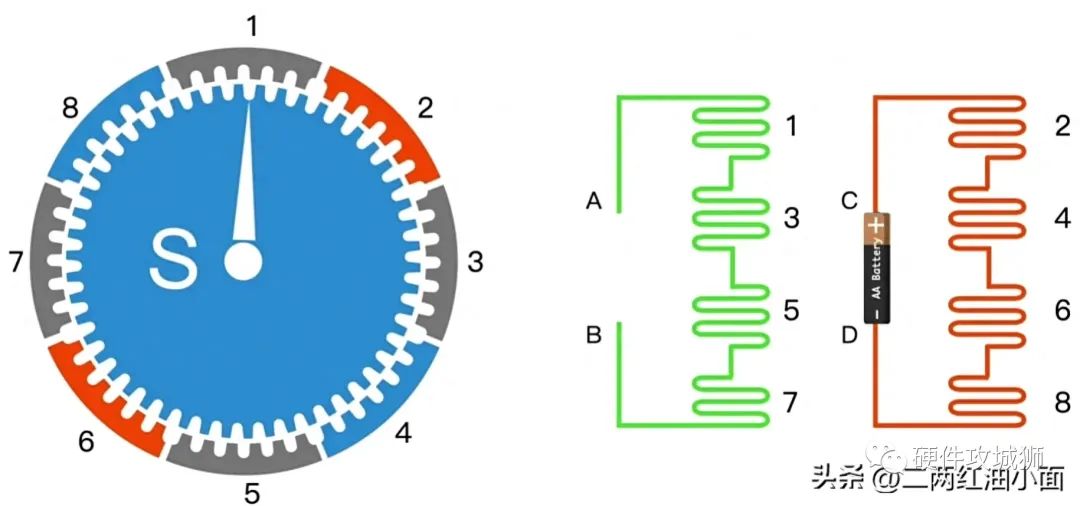
②:给第2个线圈正向通电时,2号和6号的定子为N极吸引转子转动1.8°
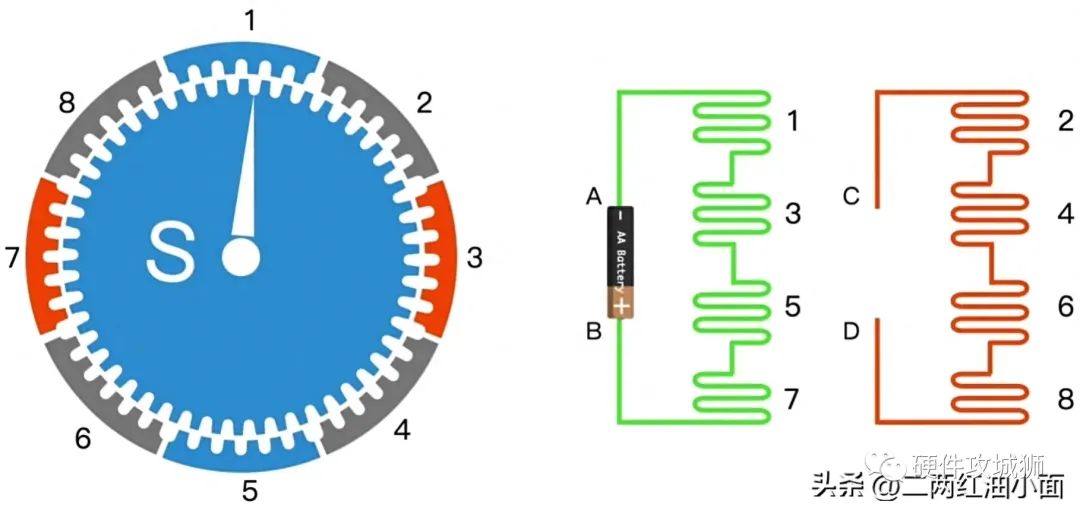
③:给第1个线圈反向充电时,3号和7号的定子为N极,吸引转子转动1.8°
④:给第2个线圈反向充电时,4号和8号的电子为N极,吸引转子转动1.8°
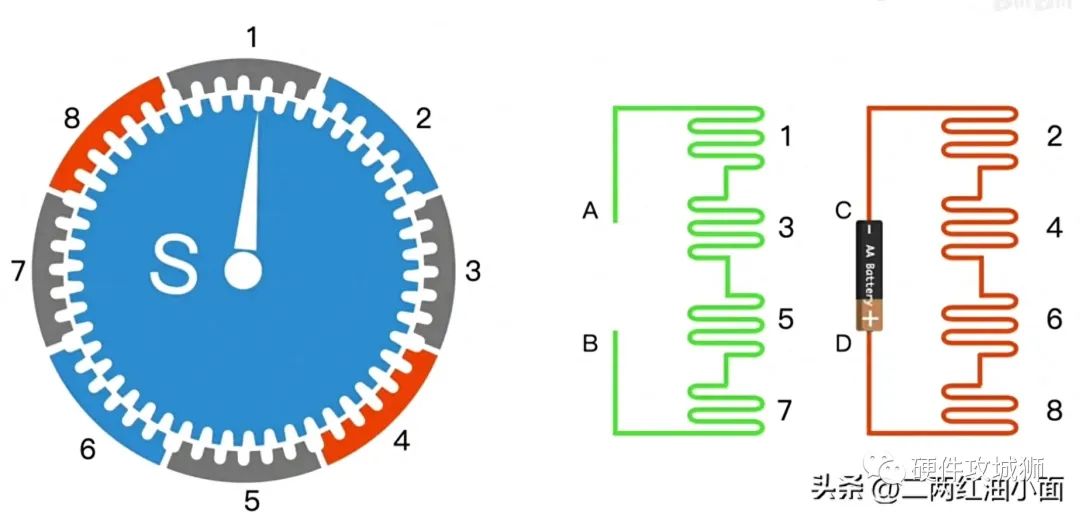
这4步为一个循环,一共转7.2°
增加扭矩
现在我们基本搞懂了步进电机的工作原理了,但是实际应用过程中如果步进电机驱动一个很重的物体的话会带不动原因也很简单,可能是动力不足,或者是物体太重
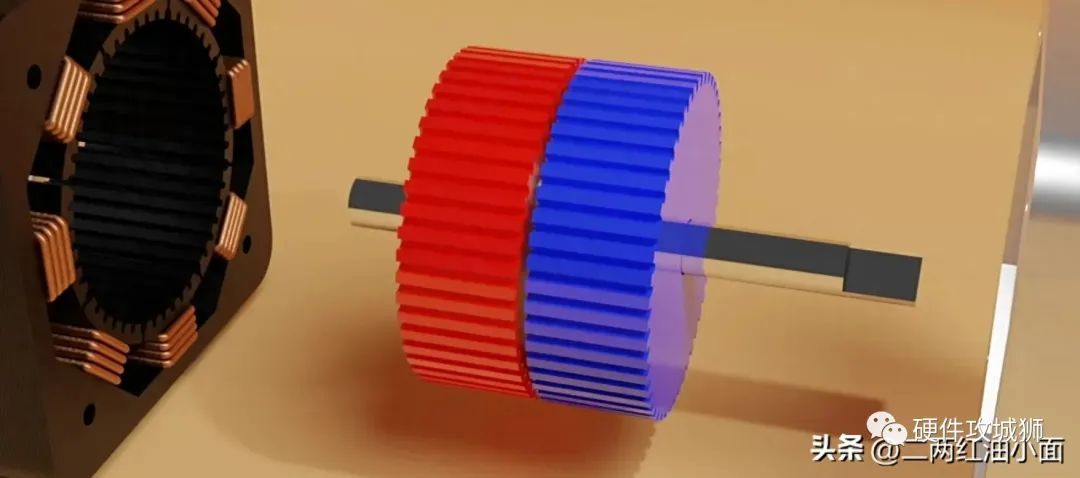
那为何不妨再通过增加一个磁铁来增强扭矩呢?
如图是一个NS的永磁体,他们之间的齿轮是互相错开的(即相差3.6°)
从前面看转子是S级,当1号和5号为N级时(3号和7号为N级),转子转动1.8度
从后面看转子是N级,当1号和5号为N级时(3号和7号为N极),因为同向相斥,异性相吸,此时转子又转动1.8°
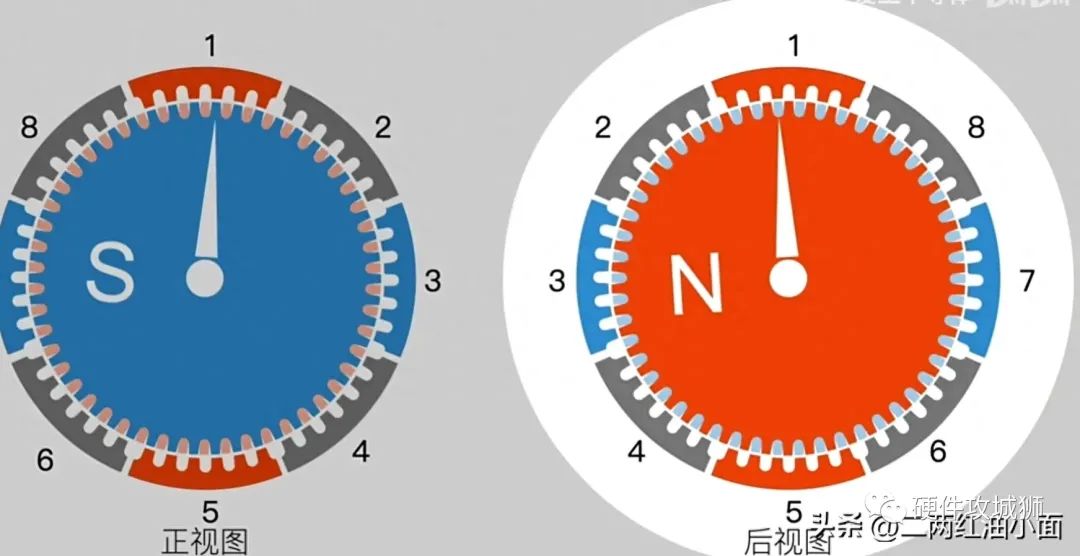
这样扭矩就增大了
总结
通过输出脉冲信号能控制步进电机转动到特定的角度
在一般工业自动化的设备中,多数都是采用步进电机(好处是只需通过编程就能实现特定角度,而无需加传感器这些外设)
编辑:黄飞
-
伺服电机和步进电机的工作状态下区别是什么2024-02-02 2380
-
混合式步进电机的结构和工作原理2023-02-24 3155
-
步进电机是如何工作的2021-09-06 1464
-
步进电机是如何工作的?#电机The Engineering Mindset 2021-07-20
-
步进电机是如何工作的?2021-07-08 692
-
单极步进电机是如何工作的2021-07-07 1476
-
混合式步进电机的结构及工作原理2021-06-12 8533
-
步进电机的工作电流2020-12-28 5239
-
什么样的温度更适应于步进电机的工作2020-09-25 4243
-
现代步进电机如何工作2019-03-12 4828
-
PLC发脉冲给伺服电机不转的解决办法2018-09-13 37573
-
步进电机3种工作状态分析2018-02-07 13708
-
步进电机的工作特性2012-01-26 3437
-
超声成像系统步进电机驱动电路的设计2009-04-06 767
全部0条评论

快来发表一下你的评论吧 !
