

基于KUKA C4机器人的控制柜(CCU)设计
机器人
描述
控制柜 (CCU)
CCU -控制柜包含两块电路板:
CIB - 控制柜接口板
PMB - 电源管理板
控制柜是机器人控制系统所有组件的配电装置和通讯接口。
所有数据通过内部通讯传输给控制系统,并在那里继续处理。
当电源断电时,控制系统部件接受蓄电池供电,直至位置数据备份完成以及控制系统关闭。
通过负载测试检查蓄电池的充电状态和质量。
控制柜 (CCU)包含两块电路板 (CIB 控制柜接口板和 PMB 电源管理板),是机器人控制系统所有组件的配电装置和通讯接口。所有数据通过内部通讯传输给控制系统,并在那里继续处理。当电源断电时,控制系统部件接受蓄电池供电,直至位置数据备份完成以及控制系统关闭。通过负载测试检查蓄电池的充电状态和质量。
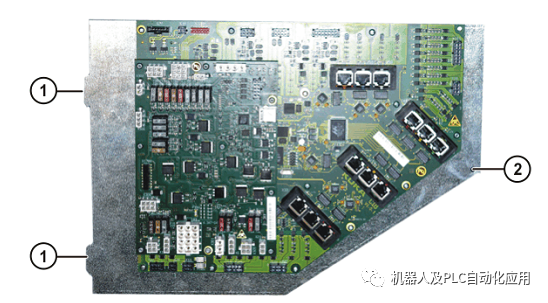
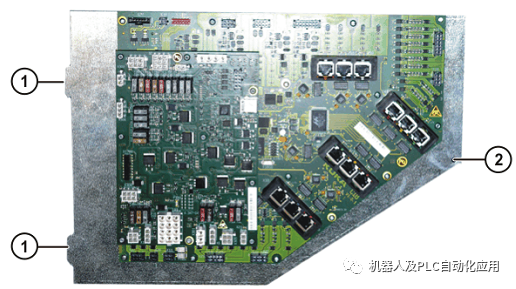
1 连接板插接片(安装时需要插入插槽)
2 固定螺丝(用于安装/更换)
CIB 板的功能:
机器人控制系统部件的通讯接口
安全输出端和输入端
零点复归
插入的库卡 smartPAD
选项: US2 可控负载电压
选项: X311 外部确认和紧急停机控制柜
4 个适用于客户应用程序的测量输入端(节拍:125 μsec)
主开关的信号触点
监控机器人控制系统中的风扇转速
外部风扇
控制系统电脑的风扇
温度值采集:
变压器的热效自动开关输入电压(选项)
冷却装置信号触点(选项)
镇流电阻温度传感器
柜内温度传感器
下列部件通过库卡控制器总线与控制系统电脑相连接:
KUKA Power Pack / KUKA Servo Packs
旋转变压器数字转换器
通过库卡系统总线,下列组件可与控制系统电脑相连接:
库卡 smartPAD (Operator Panel Interface)
安全接口板
CSP 诊断 LED
电子数据存储器的接口
PMB 板功能
缓冲式供电
KPP
库卡 smartPAD
控制系统多核电脑
控制系统操作面板 (CSP)
Resolver Digital Converter (RDC)
非缓冲式供电
KSP
电机制动装置
外部风扇
客户接口
快速测量输入端
控制柜的功能:
1.机器人控制系统部件的通讯接口
2.安全输出端和输入端
控制主接触器 1 和 2
校准定位
插入的库卡 smartPAD
3.8 个适用于客户应用程序的测量输入端 (节拍:125μsec)
4.监控机器人控制系统中的风扇


(1)-------X14 外部风扇接口
外部风扇


(33)----X4 KPP、KPC 和 PC 风扇的电源电压
控制系统电脑的风扇
5.温度值采集:
变压器的热效自动开关
冷却器的信号触点
主开关的信号触点
镇流电阻温度传感器
柜内温度传感器
6.下列部件通过库卡控制器总线与控制系统电脑相连接:
KUKA Power Pack / KUKA Servo Packs
分解器数字转换器
7.通过库卡系统总线,下列组件可与控制系统电脑相连接:
库卡 smartPAD (Operator Panel Interface)
安全接口板
8.诊断 LED
9.电子数据存储器的接口
控制柜 (CCU ) 的电源---缓冲式供电
(33)----X4 KPP、KPC 和 PC 风扇的电源电压
KPP
KSP
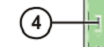

(4 )------X306 smartPAD 电源
库卡 smartPAD
控制系统多核电脑


(34)----- X307 CSP 电源
控制系统操作面板 (CSP)


(41)----- X21 RDC 电源
分解器数字转换器 (RDC) KPP
非缓冲式供电
电机制动装置

(6) ------X3 KSP 和制动装置


(1)------ X14 外部风扇接口
外部风扇
客户接口
快速测量输入端
不要混淆插接位置。检查电缆、插头和插接位置标识。插头 X14 外部风扇和 X305 蓄电池的插头形状相同。如果混淆了这两个插头,则会损坏 CCU。会有着火危险。通过接口 X18 SmartPad 将加载附加电压。
更换CUU时,取下固定板上的螺栓,将固定板连同 CCU 从连接板开口处拉出。
检查新 CCU 是否有机械损伤。将固定板连同 CCU 插入连接板开口,然后拧紧。
编辑:黄飞
-
发那科机器人A型控制柜急停板安全回路接线方法2025-03-17 9283
-
工业机器人控制柜的组成有哪些2024-06-16 4128
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3890
-
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错2022-03-17 9770
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1675
-
KUKA机器人伺服驱动模块维修2021-09-17 1885
-
库卡机器人MGV电源模块维修2021-09-08 1881
-
机器人本体与控制柜连接线_机器人本体的结构形式2020-08-24 8671
-
KR C4机器人和LBR iiwa机器人的不同之处2019-07-08 2748
-
西门子1500与KUKA工业机器人的Profinet通讯步骤2019-04-28 15061
-
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载2019-04-22 5562
-
求KUKA机器人控制柜三维模型2016-04-18 6462
-
KUKA重型机器人2015-02-03 8320
全部0条评论

快来发表一下你的评论吧 !
