

晶体管级施密特触发器实用原理解析
电子说
描述
其实像这些基本的电路、比如D触发器、Schmitt Trigger,MUX等这些电路在PDK中很多工艺都是有的,但是很多情况下我们需要自己设计有某些功能的电路,所以库里的单元就不合适了。
比如D触发器,这个是大学数电里面再基础不过的电路,让你不看书自己搭一个D触发器,相信很多同学也是做不到的,这个需要慢慢磨练。D触发器虽然算是数字电路,但是在我们模拟IC工程师做电路来说,D触发器是经常使用的。
对于施密特触发器,在模拟IC也是有很多应用,我在工作中就用到了,也做了很多仿真。今天来给大家从晶体管级详细分析一下施密特触发器,以后你们用到了可以来我这里看看。
在数电一书中,施密特触发器归为脉冲整形电路,当施密特触发器用作脉冲整形的时候,一般是在有振荡波形的电路中,当输出振荡波形有噪声的时候,施密特触发器最重要的特点是能够把变化缓慢的输入信号整形成边沿陡峭的矩形脉冲。同时,施密特触发器还可利用其回差电压来提高电路的抗干扰能力。
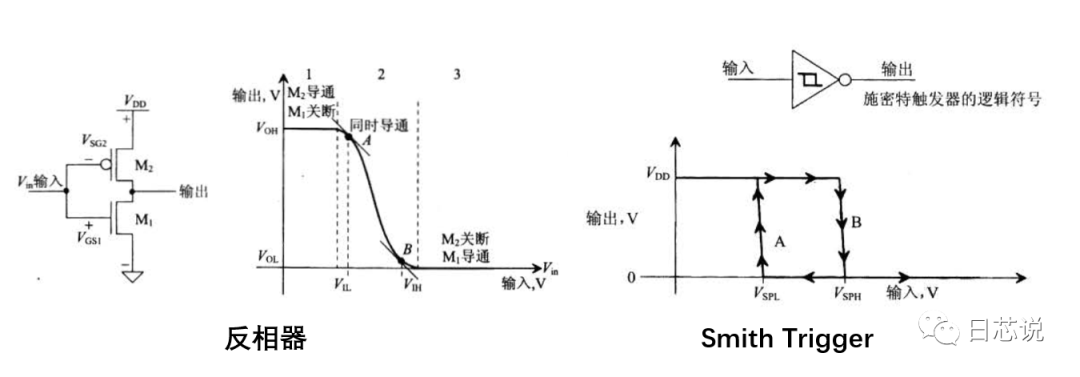
Schmitt Trigger和反相器很大的区别就是Schmitt Trigger的上升和下降的翻转阈值不同,有迟滞,虽然反相器精心设计尺寸也可以有迟滞,但是效果没有Schmitt Trigger好。迟滞的一个很大好处就是,输入的噪声如果在迟滞区间内,那么输出就不会翻转。
比如,一般比较器只有一个作比较的临界电压,若输入端有噪声来回多次穿越临界电压时,输出端即受到干扰,其正负状态产生不正常转换,如下图。

如果换做施密特触发器,由于施密特触发器的迟滞特性,只要噪声的大小在两个临界电压(上临界电压及下临界电压)形成的滞后电压范围内,即可避免噪声误触发电路。

现在我们以常用的施密特触发器晶体管级电路为例,说明施密特触发器的工作原理,以及管子的尺寸选取依据,迟滞是如何形成,正反馈怎么形成的。

这是常用施密特触发器的结构,我们组的电路也是采用这种结构的Schmitt Trigger。迟滞就是利用M6和M3来实现的。当输出是高电平时,M3导通,M4和M5导通,M6截止,提供了一个VDD到输出端的通路;当输出是低电平时,M6导通,M1和M2导通,M3截止,提供了一个输出端到地的通路。
施密特触发器有两个翻转阈值,输入由低电平升到高电平,输出由高电平到低电平转换,这个阈值叫做正翻转阈值VT+,输入由高电平升到低电平,输出由低电平到高电平转换,这个阈值叫做负翻转阈值VT-,二者的差值就是滞回区间。
首先分析输入进行正转换的过程。当输入是0,输出是高电平时,M1和M2截止,M3导通,A点电压大小是M3的源端电压,即VA=VDD-Vth3。当输入Vin由0到VDD增大,在Vin小于M1的阈值电压Vth1之前,VA一直是VDD-Vth3,当Vin增加到大于Vth1,M1导通,A点电压由于M1的导通开始降低,由于M2的源端即A点电压不是0V,所以M2后于M1导通,这也是迟滞的来源。
当Vin增大直到Vin-VA=Vth2时,M2导通,一旦M2导通,输出就开始下降,使得M3慢慢关断,使得A点进一步下降,A点电压下降,同时输入Vin增大,使得M2导通的更快,输出下降的更快,使得M3管关断的更快,最后M1和M2完全导通,这就是一个正反馈过程,图中红圈部分。

定义M2管开始导通的Vin为正翻转电压VT+:

当M2导通的瞬间,M1和M3的电流相等,得到:

有同学好奇,你怎么知道M1和M3是饱和区电流而不是线性区,当Vin由0增大,M1导通后肯定是先进入饱和区再是线性区,M3由于漏端是VDD,肯定是饱和区的。
由于M2和M3的源端短接,M2和M3的体端都是地,因此Vth2=Vth3,将(1)代入(2)式,得到:

由于M1的源端和体端短接,因此M1没有体效应,M2和M3是有体效应的,所以Vth1小于Vth2和Vth3.
按照自己设计指标给定一个VT+,通过(3)得到M1和M3的尺寸比例,M2的尺寸要比M1和M3的尺寸大一些,因为M2是当作一个开关来用,我们希望它在正反馈环路中速度快一些,有利于正反馈。
尺寸比例得到了,至于W和L取多大,要看电路的指标要求了。对于低频电路,L不需要特别小。对于低功耗电路,W/L不能太大,不然功耗很大。
然后同理分析输入进行负转换的过程。当输入是高电平,输出是低电平时,M4和M5截止,M6导通,B点电压大小是M6的源端电压,即VB=|Vth6|。当输入Vin由VDD到0增大,在VDD-Vin小于M5的阈值电压|Vth5|之前,VB一直是|Vth6|,当Vin减小VDD-Vin大于|Vth5|时,M5导通,B点电压由于M5的导通开始升高,由于M4的源端即B点电压不是VDD而是小于VDD,所以M4后于M5导通,这也是迟滞的来源。
当Vin减小直到VB-Vin=|Vth4|时,M4导通,一旦M4导通,输出就开始升高,使得M6慢慢关断,使得B点进一步升高,B点电压升高,同时输入Vin减小,使得M4导通的更快,输出升高的更快,使得M6管关断的更快,最后M4和M5完全导通,这就是一个正反馈过程,图中红圈部分。

定义M4管开始导通的Vin为负翻转电压VT-:

当M4导通的瞬间,M5和M6的电流相等,得到:

加入M4、M5和M6的体端都接VDD,M4和M6的源端短接,那么M4和M6体效应相等,故|Vth6|=|Vth4|,将(4)代入(5)式,得到:

按照自己设计指标给定一个VT-,通过(6)得到M5和M6的尺寸比例,M4的尺寸要比M5和M6的尺寸大一些,因为M4是当作一个开关来用,我们希望它在正反馈环路中速度快一些,有利于正反馈。
以上就完整说明了正负翻转阈值电压的设计原理以及各个管子的尺寸设计依据,根据电路要求自己给定VT+和VT-来设计管子尺寸,通过改变管子尺寸来得到不同的VT+和VT-。
-
晶体管设计施密特触发器工作原理、实例2022-10-31 2928
-
如何使用晶体管设计施密特触发器2022-09-01 3339
-
施密特触发器芯片有哪些_施密特触发器的特点及作用2018-02-08 51291
-
施密特触发器电路及工作原理详解_施密特触发器特点_施密特触发器的作用2018-01-16 50793
-
施密特触发器的作用_施密特触发器的典型应用2017-08-14 30828
-
关于施密特触发器输出2016-05-06 5798
-
互补管施密特触发器2010-03-10 1063
-
施密特触发器,施密特触发器是什么意思2010-03-08 2398
-
施密特触发器的特性和符号2009-09-30 6733
-
施密特触发器 (ppt教案)2009-09-24 1647
-
晶体管组成的施密特触发器2009-09-17 3979
-
施密特触发器的应用2009-09-16 7162
-
施密特触发器2006-07-03 4926
全部0条评论

快来发表一下你的评论吧 !
