

 Qt应用开发--国产工业开发板T113-i的部署教程
Qt应用开发--国产工业开发板T113-i的部署教程
描述
Qt在工业上的使用场景包括工业自动化、嵌入式系统、汽车行业、航空航天、医疗设备、制造业和物联网应用。Qt被用来开发工业设备的用户界面、控制系统、嵌入式应用和其他工业应用,因其跨平台性和丰富的功能而备受青睐。
Qt能够为工业领域带来什么好处:
- - Qt提供了强大的图形引擎,使开发人员能够创建具有吸引力和高性能的用户界面。
- - Qt允许开发人员根据具体需求定制用户界面和功能。这对于满足不同行业和项目的独特需求至关重要,使工业应用能够实现个性化的解决方案
- - Qt提供了丰富的库和工具,涵盖了各种应用程序开发需求,包括图形、网络通信、多媒体处理、数据存储等。这简化了工业应用程序的开发流程
- - Qt可以轻松与各种硬件设备和通信协议集成,这对于工业自动化和控制系统来说非常重要,因为它们需要与各种传感器、执行器和其他工业设备进行通信
本次开发教程的测试板卡来自创龙科技的TLT113-EVM国产工业评估板,基于全志科技T113-i双核ARM Cortex-A7 + 玄铁C906 RISC-V + HiFi4 DSP异构多核处理器设计,ARM Cortex-A7处理器单元主频高达1.2GHz。
评估板由核心板和评估底板组成,核心板CPU、ROM、RAM、电源、晶振等所有元器件均采用国产工业级方案,国产化率100%。同时,评估底板大部分元器件亦采用国产工业级方案。核心板经过专业的PCB Layout和高低温测试验证,稳定可靠,可满足各种工业应用环境。
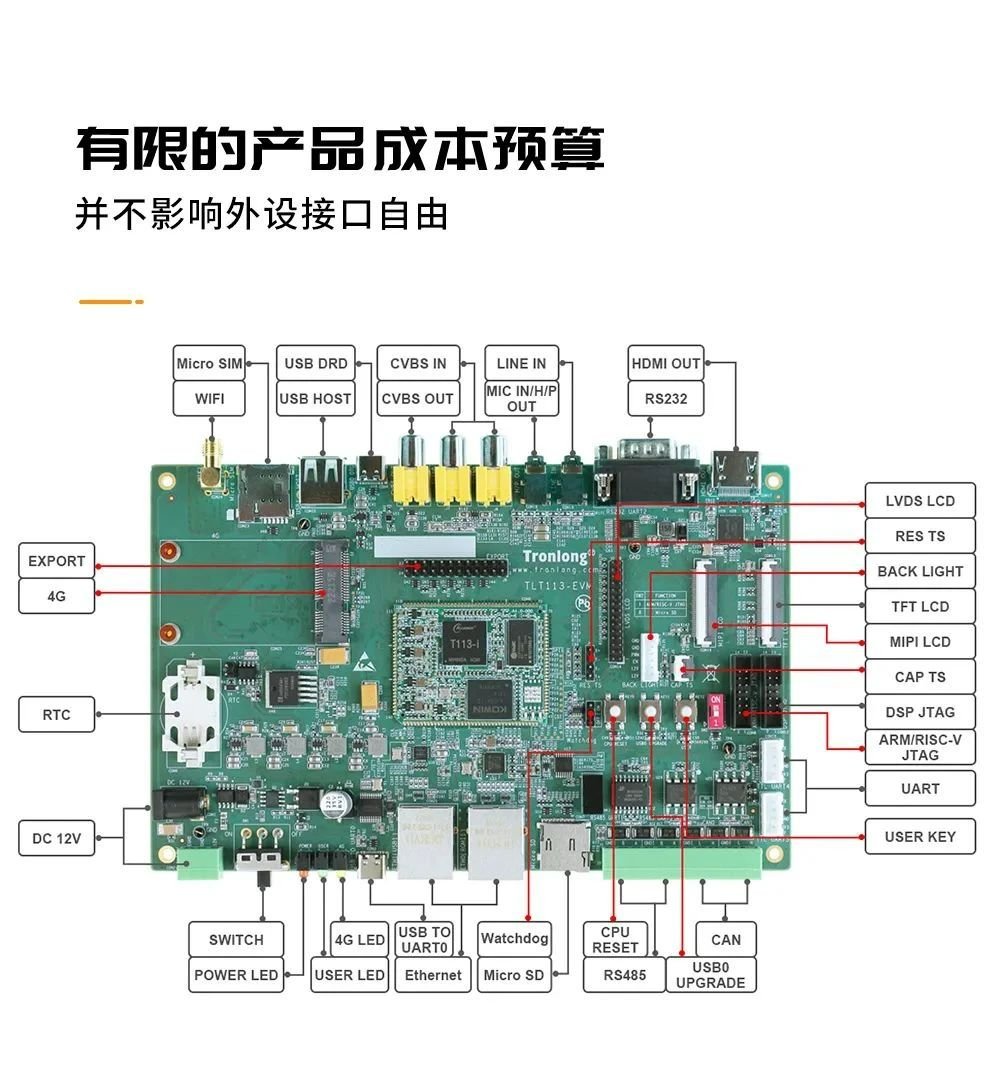
T113-i国产工业评估板硬件资源图解
此外,T113-i国产工业开发板的接口资源丰富,能够支持引出双路网口、双路CAN、双路USB、双路RS485、RS232等通信接口,同时引出LVDS LCD、TFT LCD、MIPI LCD、HDMI OUT、CVBS IN/OUT、LINE IN、MIC IN、H/P OUT等音视频多媒体接口,板载WIFI、4G(选配)模块,支持1080P@60fps JPEG/MJPEG视频硬件编码,支持4K@30fps H.265、4K@24fps H.264视频硬件解码,方便用户快速进行产品方案评估与技术预研。
创龙科技的这款T113-i国产工业开发板它提供了Qt的运行环境,可以让我们快速的部署工业领域的用户交互界面,控制系统。
接下来我们来聊聊如何在创龙科技T113-i工业开发板上部署Qt应用。
开发板Qt运行环境
开发板SDK准备
- 创龙科技的资料中提供了开发板的SDK-T113-i_v1.0.tar.gz,需要解压ubuntu中解压出来:
rice@rice:~$ mkdir t113 //创建t113工作目录,然后将压缩包拷贝到此目录
rice@rice:~$ cd t113
....
rice@rice:~/t113$ tar -zxvf SDK-T113-i_v1.0.tar.gz
rice@rice:~/t113$ cd T113-i_v1.0/
rice@rice:~/t113/T113-i_v1.0$ ls
brandy buildroot device install_tools.sh out rtos-dsp tools
build build.sh kernel platform test
- 安装依赖软件,创龙科技提供了安装脚本:install_tools.sh,我们执行该脚本即可完成依赖工具的安装:
rice@rice:~/t113/T113-i_v1.0$ ./install_tools.sh
[sudo] password for rice:
Reading package lists... Done
Building dependency tree
Reading state information... Done
texinfo is already the newest version (6.5.0.dfsg.1-2).
0 upgraded, 0 newly installed, 0 to remove and 121 not upgraded.
Reading package lists... Done
Building dependency tree
Reading state information... Done
pkg-config is already the newest version (0.29.1-0ubuntu2).
0 upgraded, 0 newly installed, 0 to remove and 121 not upgraded.
Reading package lists... Done
......
- 解压Buildroot dl--dl.tar.gz,其为 Buildroot dl 目录压缩包,用于存放从官网下载的开源软件包:
rice@rice:~/t113$ tar -xvf dl.tar.gz -C ~/t113/buildroot/buildroot-201902/
构建Qt固件
- 在编译固件前,先清理一下SDK的编译和配置生成文件:
rice@rice:~/t113/T113-i_v1.0$ ./build.sh distclean
- 配置linux内核,处理器型号,显示方式,编译器等信息
rice@rice:~/t113/T113-i_v1.0$ ./build.sh config
Welcome to mkscript setup progress
All available platform:
0. linux
Choice [linux]: 0
All available linux_dev:
0. bsp
1. dragonboard
2. longan
3. tinyos
Choice [longan]: 2
All available kern_ver:
0. linux-5.4
Choice [linux-5.4]: 0
All available ic:
0. t113
1. t113_i
Choice [t113_i]: 1
All available board:
0. evb1
1. evb1_auto
2. evb1_auto_nand
3. evb1_auto_nor
4. tlt113-evm-emmc
5. tlt113-evm-nand
6. tlt113-minievm-emmc
7. tlt113-minievm-nand
Choice [tlt113-evm-nand]: 5
All available output_configs:
0. hdmi
1. lvds-lcd
2. mipi-lcd
3. tft-lcd
4. cvbs
Choice [hdmi]: 0
All available flash:
0. default
1. nor
Choice [default]: 0
All available build_root:
0. buildroot-201902
1. ubuntu
Choice [buildroot-201902]: 0
All available gnueabi:
0. gnueabi
1. gnueabihf
Choice [gnueabi]: 0
- 设置编译的环境变量:
rice@rice:~/t113/T113-i_v1.0$ source ./build/envsetup.sh
- 我们采用一键编译 SPL、U-Boot、Linux 内核和 buildroot文件系统。
rice@rice:~/t113/T113-i_v1.0$ ./build.sh
ACTION List: mklichee;========
Execute command: mklichee
INFO: ----------------------------------------
INFO: build lichee ...
INFO: chip: sun8iw20p1
INFO: platform: linux
INFO: kernel: linux-5.4
INFO: board: tlt113-evm-nand
INFO: output: /home/rice/t113/T113-i_v1.0/out/t113_i/tlt113-evm-nand/longan
INFO: ----------------------------------------
INFO: build buildroot ...
Prepare br toolchain gcc-linaro-5.3.1-2016.05-x86_64_arm-linux-gnueabi.tar.xz...
make: Entering directory '/home/rice/t113/T113-i_v1.0/buildroot/buildroot-201902'
...
- 编译Qt库,使其开发板固件支持Qt应用运行环境:
rice@rice:~/t113/T113-i_v1.0$ ./build.sh qt
ACTION List: mkqt;========
Execute command: mkqt
INFO: build Qt ...
INFO: build arm-linux-gnueabi version's Qt
/home/rice/t113/T113-i_v1.0/platform/framework/qt/qt-everywhere-src-5.12.5
Using built-in specs.
COLLECT_GCC=gcc
COLLECT_LTO_WRAPPER=/usr/lib/gcc/x86_64-linux-gnu/7/lto-wrapper
OFFLOAD_TARGET_NAMES=nvptx-none
OFFLOAD_TARGET_DEFAULT=1
Target: x86_64-linux-gnu
Configured with: ../src/configure -v --with-pkgversion='Ubuntu 7.5.0-3ubuntu1~18.04' --with-bugurl=file:///usr/share/doc/gcc-7/README.Bugs --enable-languages=c,ada,c++,go,brig,d,fortran,objc,obj-c++ --prefix=/usr --with-gcc-major-version-only --program-suffix=-7 --program-prefix=x86_64-linux-gnu- --enable-shared --enable-linker-build-id --libexecdir=/usr/lib --without-included-gettext --enable-threads=posix --libdir=/usr/lib --enable-nls --enable-bootstrap --enable-clocale=gnu --enable-libstdcxx-debug --enable-libstdcxx-time=yes --with-default-libstdcxx-abi=new --enable-gnu-unique-object --disable-vtable-verify --enable-libmpx --enable-plugin --enable-default-pie --with-system-zlib --with-target-system-zlib --enable-objc-gc=auto --enable-multiarch --disable-werror --with-arch-32=i686 --with-abi=m64 --with-multilib-list=m32,m64,mx32 --enable-multilib --with-tune=generic --enable-offload-targets=nvptx-none --without-cuda-driver --enable-checking=release --build=x86_64-linux-gnu --host=x86_64-linux-gnu --target=x86_64-linux-gnu
Thread model: posix
.....
- 打包系统镜像文件,执行之后,可以看到生成的固件文件,它默认生成两个版本的固件,分别是:nand固件和SD卡固件,我们是采用SD卡启动,所以使用SD卡固件。
rice@rice:~/t113/T113-i_v1.0$ ./build.sh pack
ACTION List: mkpack ;========
Execute command: mkpack
INFO: packing firmware ...
INFO: Use BIN_PATH: /home/rice/t113/T113-i_v1.0/device/config/chips/t113_i/bin
copying tools file
copying configs file
copying product configs file
/home/rice/t113/T113-i_v1.0/out/pack_out/aultls32.fex
/home/rice/t113/T113-i_v1.0/out/pack_out/aultools.fex
/home/rice/t113/T113-i_v1.0/out/pack_out/boot_package.cfg
/home/rice/t113/T113-i_v1.0/out/pack_out/boot_package.fex
......
dsp0.fex Len: 0x3fc78
Vdsp0.fex Len: 0x4
BuildImg 0
Dragon execute image.cfg SUCCESS !
----------image is at----------
size:613M /home/rice/t113/T113-i_v1.0/out/t113_i_linux_tlt113-evm-nand-sdboot_uart0.img
pack finish
运行环境验证
下载运行实例
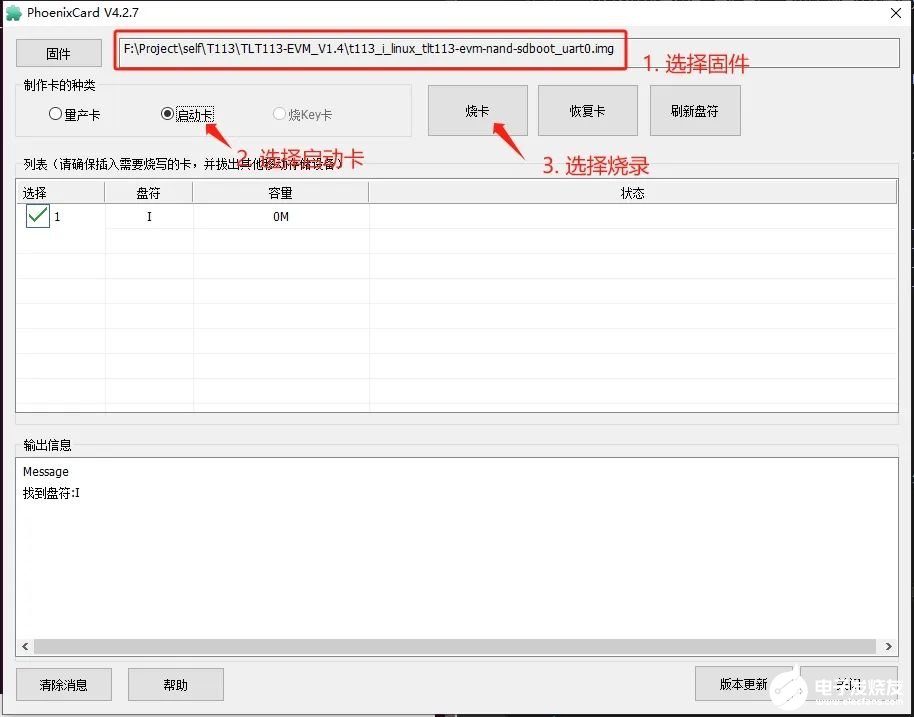
- 将编译打包后的固件(t113_i_linux_tlt113-evm-nand-sdboot_uart0.img)放到windows上,通过工具PhoenixCard.exe烧录到SD卡上。将SD卡插到读卡器上,然后插进电脑:
- 创龙科技提供了qt的demo,我们将led_control的实例拷贝到板子上:
rice@rice:~/t113/qt-demos/led_control/bin$ scp led_control root@ip:~/
创龙T113-i上运行实例
- 关闭默认的Qt运行程序,设置qt的环境变量
root@T113-Tronlong:~# killall Launcher
root@T113-Tronlong:~# source /etc/qtenv.sh
add /dev/input/event1 to Qt Application.
find qt5 installed done
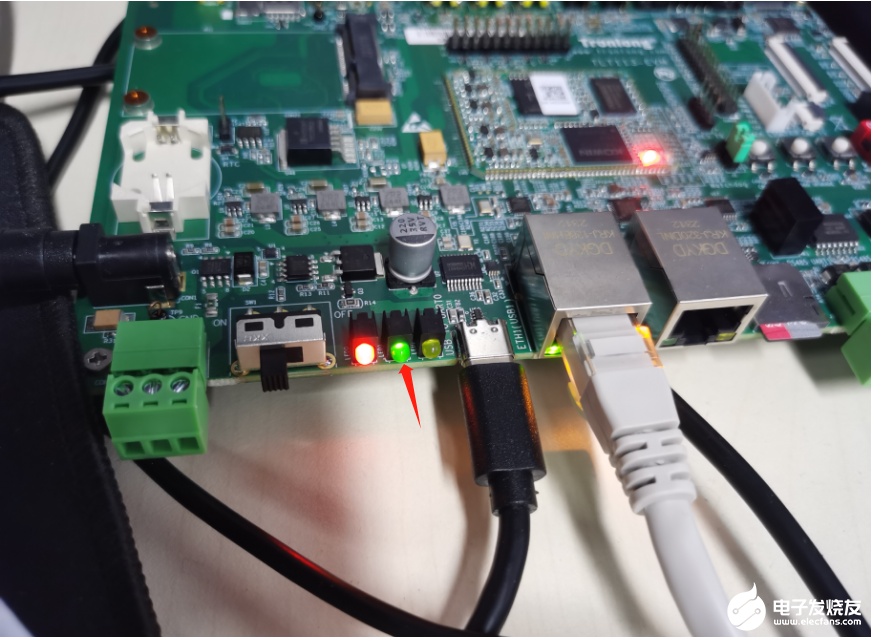
- 运行实例验证Qt功能,运行效果如图:
root@T113-Tronlong:~# ./led_control

Qt开发环境
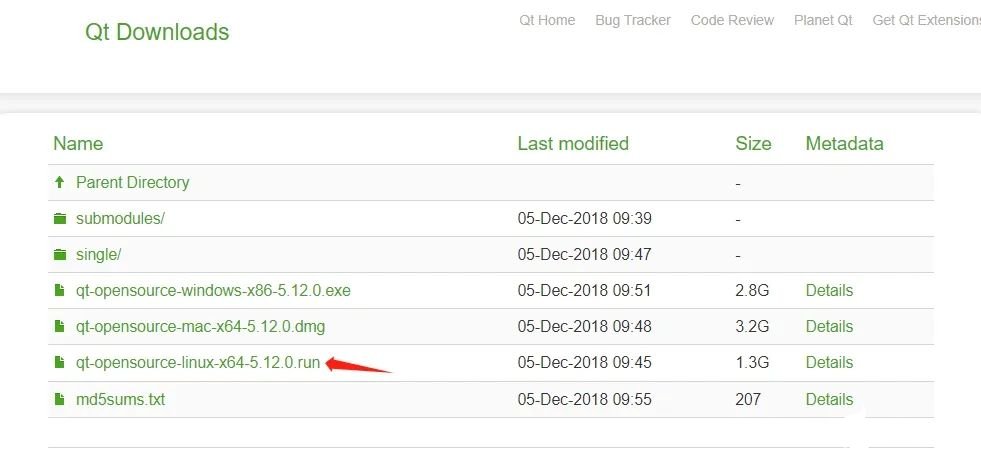
开发环境下载
- Qt开发环境下载,作者是使用Qt 5.12.0,下载链接:https://download.qt.io/archive/qt/5.12/5.12.0/,Ubuntu需要下载:qt-opensource-linux-x64-5.12.0.run
开发环境交叉编译环境配置
-
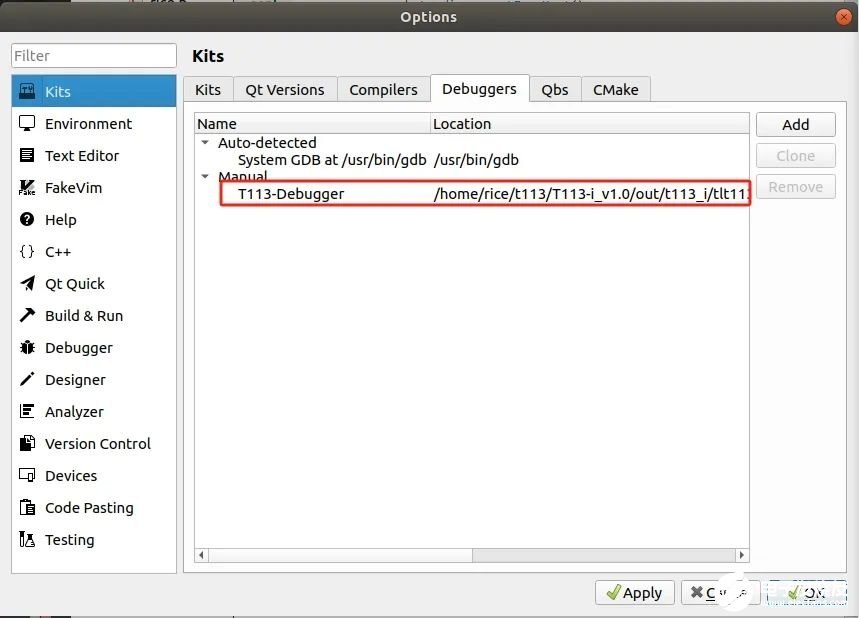
配置Debuggers
- 点击菜单栏"Tools -> Options"
- 击"Kits -> Debuggers -> Add -> Browse…"
- 选择目标平台的GDB,路径:/home/rice/t113/T113-i_v1.0/out/t113_i/tlt113-evm-nand/longan/buildroot/host/usr/bin/arm-linux-gnueabi-gdb
-
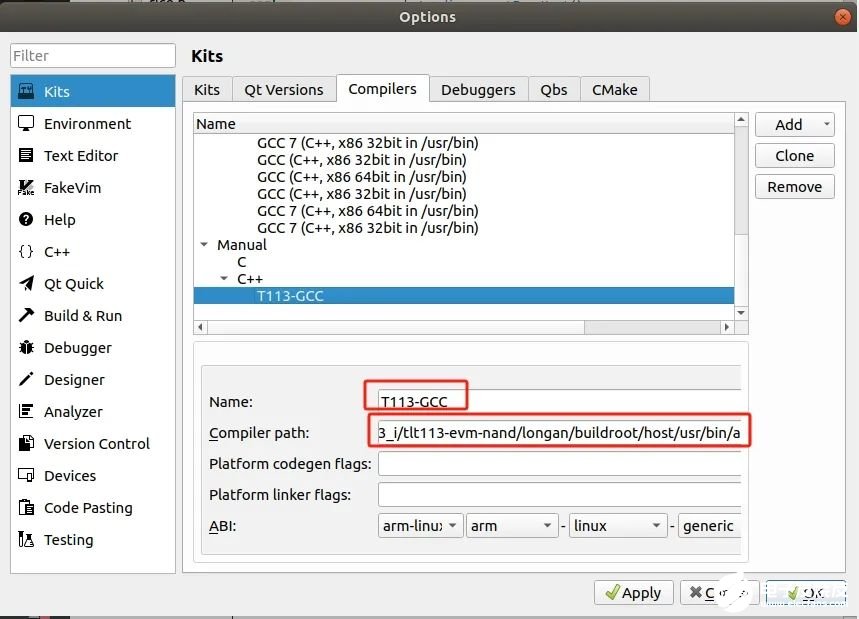
配置交叉工具链
- 点击菜单栏"Tools -> Options"
- 击"Kits -> Compilers -> Add -> GCC -> C++ -> Browse…"
- 选择目标平台的交叉工具链,路径:/home/rice/t113/T113-i_v1.0/out/t113_i/tlt113-evm-nand/longan/buildroot/host/usr/bin/arm-linux-gnueabi-g++
-
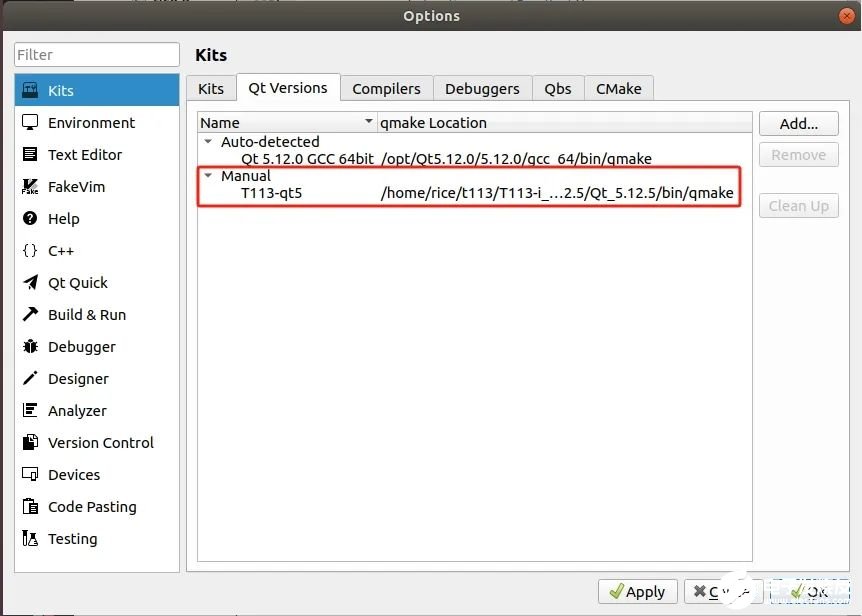
配置Qt Versions
- 点击菜单栏"Tools -> Options"
- 击"Kits -> Qt Versions -> Add -> GCC -> C++ -> Browse…"
- 选择目标平台的Qt Versions,路径:/home/rice/t113/T113-i_v1.0/platform/framework/qt/qt-everywhere-src-5.12.5/Qt_5.12.5/bin/qmake
-
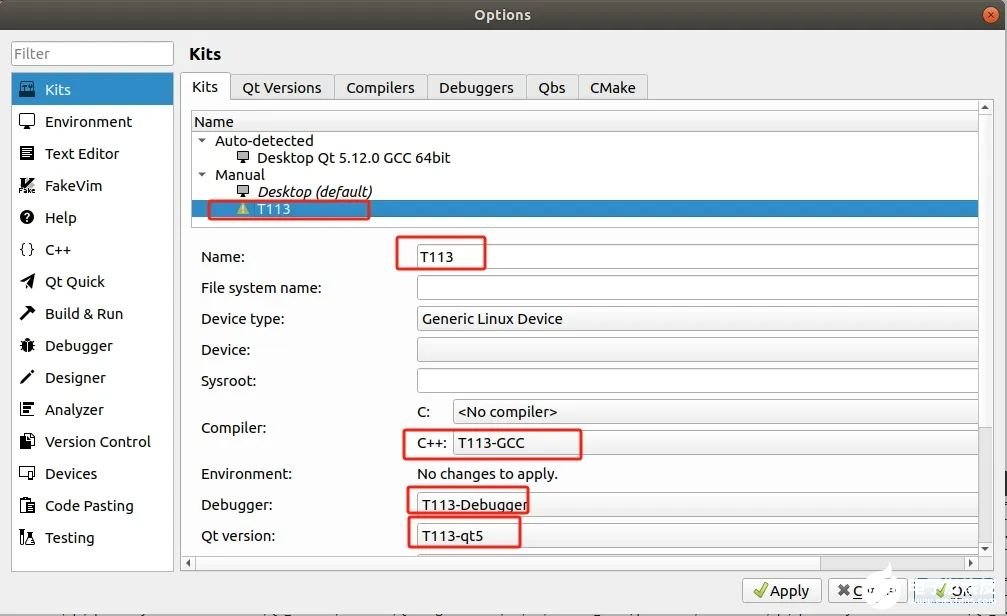
配置Kits
- 点击菜单栏"Tools -> Options"
- 击"Kits -> Kits"
- 将 Name 修改为"T113",Device type 选择"Generic Linux Device",Compiler 的 C++选择"T113-GCC",Debugger 选择"T113-Debugger",Qt version 选择"T113-qt5",点击 Apply,然后点击 OK 完成配置
开发Qt应用
- 作者开发了一个快速验证硬件功能的,主要功能包含:
- 板载LED灯控制,代码实现:
static QString ledPath = "/sys/class/leds/user-led0";
void rice::ledInit()
{
setLedStatus(0);
ui->ledPushButton->setText("LED OFF");
ui->ledPushButton->setStyleSheet("border-width:1px;"
"border-style:solid; "
"border-color:white;"
"background-color:rgba(88, 88, 88, 200)");
}
void rice::ledDeinit()
{
}
bool rice::setLedStatus(int status)
{
QString cmd = "echo " + QString::number(status) + " > " + ledPath + "/brightness";
if (system(cmd.toStdString().c_str()) == -1) {
printf("set led status failed!n");
return false;
}
return true;
}
int rice::getLedStatus(void)
{
QString cmd = "cat " + ledPath + "/brightness";
FILE *fp = popen(cmd.toStdString().c_str(), "r");
if (fp == nullptr) {
return -1;
}
char led_status[32];
if (fgets(led_status, sizeof(led_status), fp) == nullptr) {
printf("fgets error: %sn", cmd.toStdString().c_str());
pclose(fp);
return -1;
}
pclose(fp);
return atoi(led_status);
}
void rice::on_ledPushButton_clicked()
{
int ledStatus = getLedStatus();
if (ledStatus == 0) {
setLedStatus(1);
ui->ledPushButton->setText("LED ON");
ui->ledPushButton->setStyleSheet("border-width:1px;"
"border-style:solid; "
"border-color:white;"
"background-color:rgba(00, 205, 00, 255)");
}
else {
setLedStatus(0);
ui->ledPushButton->setText("LED OFF");
ui->ledPushButton->setStyleSheet("border-width:1px;"
"border-style:solid; "
"border-color:white;"
"background-color:rgba(88, 88, 88, 200)");
}
}
- 板载按键检测,代码实现:
void rice::keyInit()
{
keyFd = open(keyPath.toUtf8().data(), O_RDONLY);
if(keyFd == -1)
{
printf("Can not open file(%s)", keyPath.toUtf8().data());
return;
}
ui->keyTextEdit->append("Key Monitor!n");
ui->keyTextEdit->append("Key user0 pressed!");
keyNotify = new QSocketNotifier(this->keyFd, QSocketNotifier::Read, this);
connect(this->keyNotify, SIGNAL(activated(int)), this, SLOT(keyHandler()));
}
void rice::keyDeinit()
{
}
void rice::keyHandler()
{
struct input_event buf;
if(read(keyFd, &buf, sizeof(struct input_event)) > 0)
{
if(buf.code == KEY_PROG1 && buf.value == 1)
{
ui->keyTextEdit->append("Key user0 pressed!");
}
}
}
- RTC时钟获取并显示,代码实现:
void rice::dateInit()
{
struct rtc_time rtc_tm_temp;
dateFd = open(datePath.toUtf8().data(), O_RDONLY);
if(dateFd == -1)
{
printf("Can not open file(%s)", keyPath.toUtf8().data());
return;
}
if(ioctl(dateFd, RTC_RD_TIME, &rtc_tm_temp) < 0)
{
printf("Get date failed");
return;
}
ui->yearLineEdit->setText(QString::number(rtc_tm_temp.tm_year + 1900));
ui->monthLineEdit->setText(QString::number(rtc_tm_temp.tm_mon + 1));
ui->dayLineEdit->setText(QString::number(rtc_tm_temp.tm_mday));
}
void rice::dateDeint()
{
}
- 网络调试助手,代码实现:
void rice::netInit()
{
server = new QTcpServer();
socket = new QTcpSocket();
}
void rice::netDeint()
{
}
void rice::netNewClientConnect()
{
socket = server->nextPendingConnection();
connect(socket, &QTcpSocket::readyRead, this, &rice::netNewRcve);
}
void rice::on_netPushButton_clicked()
{
int port = ui->portLineEdit->text().toInt();
if(ui->netPushButton->text() == tr("Open"))
{
if(ui->typeComboBox->currentText() == tr("Server"))
{
connect(server, &QTcpServer::newConnection, this, &rice::netNewClientConnect);
if(!server->listen(QHostAddress::Any, port))
{
printf("Listen failedn");
return;
}
}
else if(ui->typeComboBox->currentText() == tr("Client"))
{
QString ip = ui->ipComboBox->currentText();
socket->abort();
socket->connectToHost(ip, port);
if(!socket->waitForConnected(3000))
{
printf("Connect server failed");
return;
}
connect(socket, &QTcpSocket::readyRead, this, &rice::netNewRcve);
}
ui->netPushButton->setText("Close");
}
else if(ui->netPushButton->text() == tr("Close"))
{
if(ui->typeComboBox->currentText() == tr("Server"))
{
socket->abort();
server->close();
}
else if(ui->typeComboBox->currentText() == tr("Client"))
{
socket->disconnectFromHost();
}
ui->netPushButton->setText("Open");
}
}
void rice::on_sendPushButton_clicked()
{
if(socket->isOpen())
{
socket->write(ui->sendLineEdit->text().toUtf8().data());
}
}
void rice::netNewRcve()
{
ui->recvTextEdit->append(socket->readAll());
}
void rice::on_typeComboBox_currentIndexChanged(const QString &arg1)
{
if(arg1 == tr("Server"))
{
ui->ipComboBox->setEditable(false);
}
else
{
ui->ipComboBox->setEditable(true);
}
}
Qt应用验证
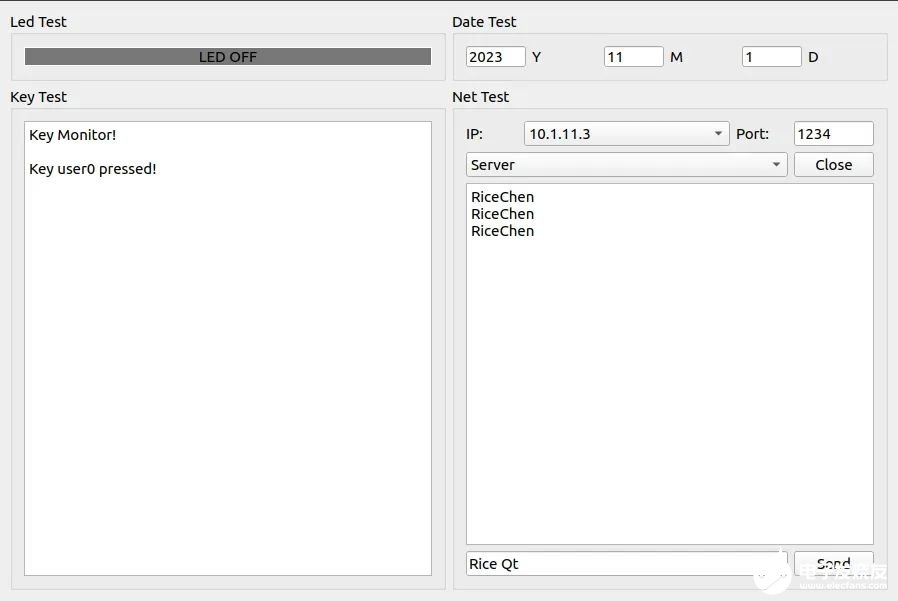
- 板载LED灯控制验证,当点击开关LED按钮时,LED灯会根据状态亮灭:
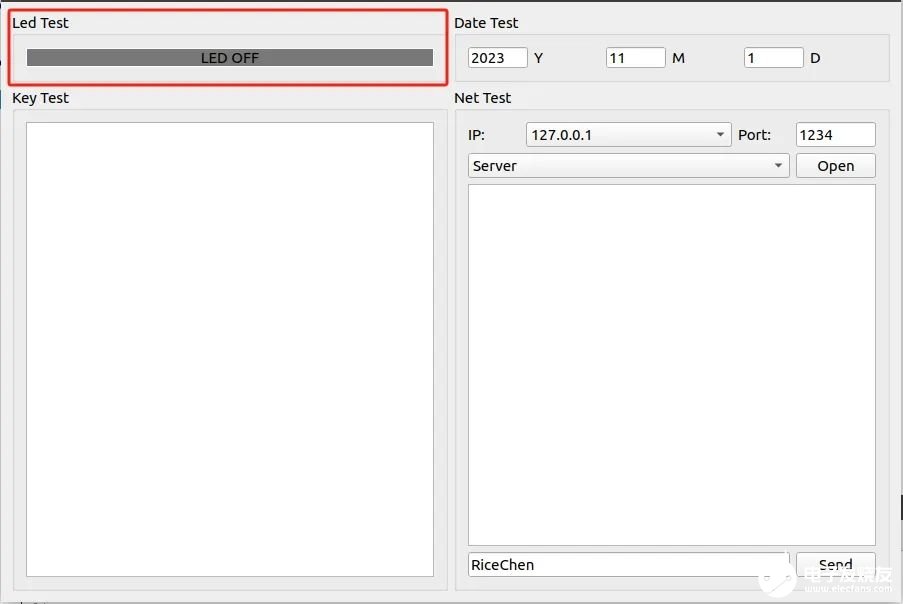
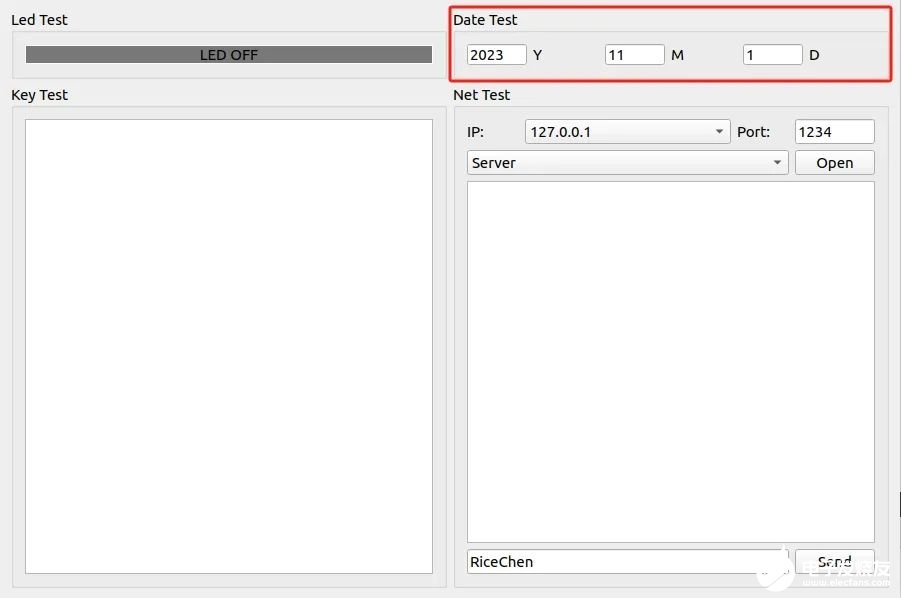
- 当应用运行起来时,会获取RTC时间,并显示:
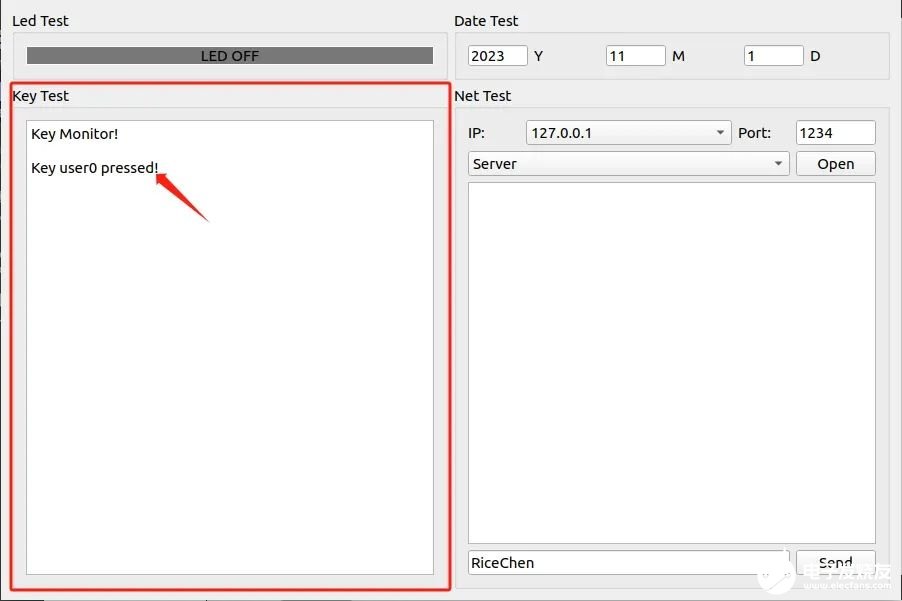
- 当板载按键按下时,窗口会显示按键按下:
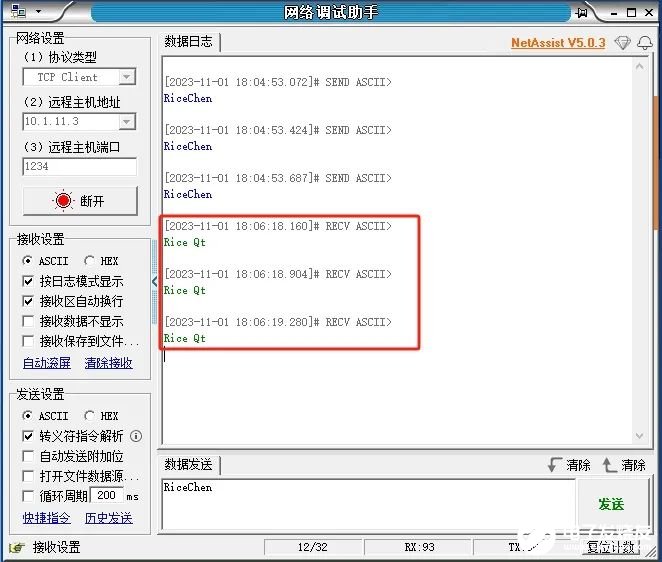
- 网络调试助手支持TCP客户端和TCP服务器两种类型,下面演示服务器验证。开发板上设置板子的IP,和端口号,然后通过PC上网络调试助手连接上板子,并克实现数据的收发:
- 客户端往服务器发送数据
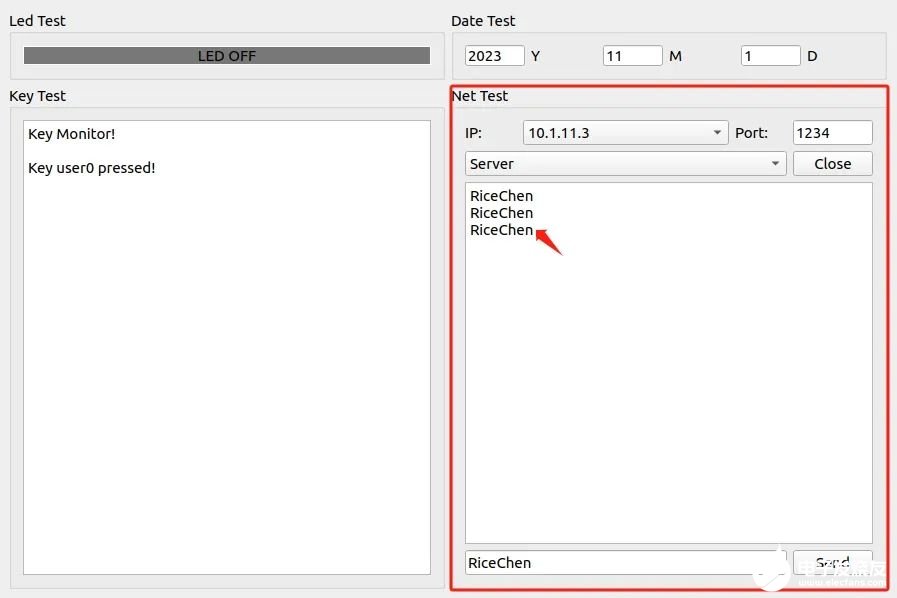
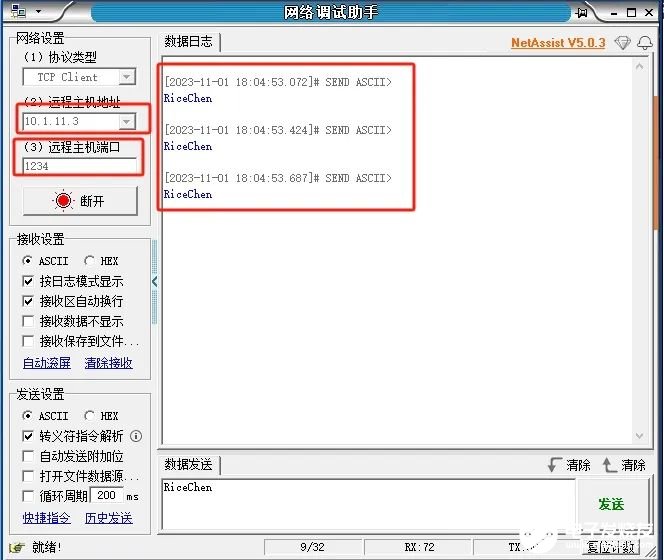
- 服务器往客户端发送数据

关于创龙科技
创龙科技(Tronlong)始创于2013年,是国内领先的嵌入式产品平台提供商,业务主要涵盖工业核心板、工业评估板、工业单板机、项目服务,总部位于广州科学城,下设独立运营的教仪事业部,在北京、天津、上海、南京、深圳、西安、成都等地设有业务及技术服务中心。
创龙科技10多年来一直专注于ARM、FPGA、DSP异构多核技术开发,坚持“国产 + 进口”双引擎产品战略,是全志、瑞芯微金牌合作伙伴,以及TI、NXP、Xilinx、紫光同创中国官方合作伙伴,为实时系统、现场总线、物联网、人工智能等技术提供应用平台,产品广泛应用于工业自动化、能源电力、仪器仪表、医疗、通信、安防等行业。

-
【正点原子】全志T113-i开发板资料震撼来袭!异核开发、工控设计方案!2025-03-13 2419
-
哇!5.2秒进入应用界面!Linux快速启动方案分享,基于全志T113-i国产平台2025-01-23 8161
-
基于全志T113-i的系统快速启动显示Qt界面、LVGL界面案例2024-11-27 3138
-
哇!0.8秒启动!Linux快速启动方案分享,全志T113-i国产平台!2024-08-22 1671
-
G2D图像处理硬件调用和测试-基于米尔-全志T113-i开发板2024-04-12 3274
-
【米尔-全志T113-i开发板试用】米尔-全志T113-i开发板与modbus设备的连接和操作2024-03-21 4280
-
飞凌嵌入式T113-i开发板的调屏方法2024-01-29 2509
-
飞凌 OK113i-C 全志T113-i开发板初体验2023-12-14 3694
-
Qt应用开发--国产工业开发板全志T113-i的部署教程2023-11-30 2086
-
如何把LVGL移植到T113-i国产工业开发板2023-11-14 2079
-
LVGL案例分享--手把手教你移植到T113-i国产工业开发板2023-11-08 3412
-
多核异构工业开发板:创龙科技T113-i2023-10-24 3666
-
上新!米尔发布纯国产入门级核心板全志T113-i方案2023-09-22 2569
-
100%国产物料认证,米尔入门级国产核心板全志T113-i方案2023-09-21 2737
全部0条评论

快来发表一下你的评论吧 !
