

什么是内存池
描述
1什么是内存池
1.1池化技术
所谓“池化技术”,就是程序先向系统申请过量的资源,然后自己管理,以备不时之需。之所以要申请过 量的资源,是因为每次申请该资源都有较大的开销,不如提前申请好了,这样使用时就会变得非常快 捷,大大提高程序运行效率。 在计算机中,有很多使用“池”这种技术的地方,除了内存池,还有连接池、线程池、对象池等。以服务 器上的线程池为例,它的主要思想是:先启动若干数量的线程,让它们处于睡眠状态,当接收到客户端 的请求时,唤醒池中某个睡眠的线程,让它来处理客户端的请求,当处理完这个请求,线程又进入睡眠 状态。
1.2内存池
内存池是指程序预先从操作系统申请一块足够大内存,此后,当程序中需要申请内存的时候,不是直接 向操作系统申请,而是直接从内存池中获取;同理,当程序释放内存的时候,并不真正将内存返回给操 作系统,而是返回内存池。当程序退出(或者特定时间)时,内存池才将之前申请的内存真正释放。减少用户层向系统层的内存申请调用,实现高效;
2.开胃菜-设计一个定长内存池
此次设计的定长内存池ObjectPool结构如下:(其单位小内存块的大小为T类型的大小)
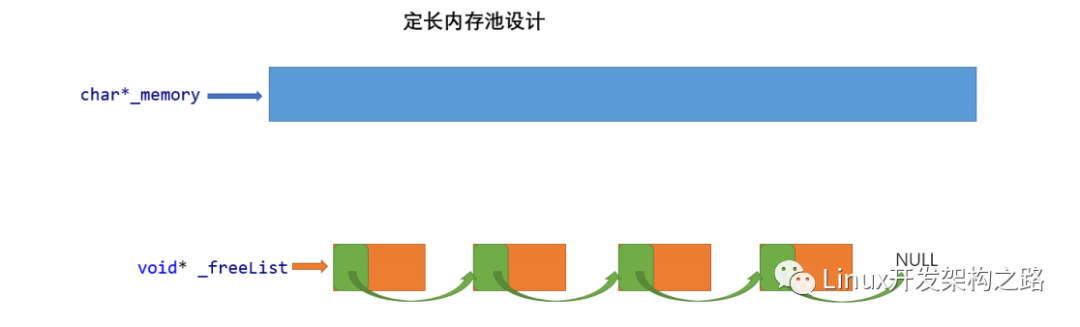
- 需要申请内存时,一次性申请一个大块空间,记录起始位置_memory;
- 需要使用size大小时,将大块内存抽象切割成小块,将起始位置_memory向后移动size大小;
- 释放内存时,将需要释放的空间挂入自由链表_freeList,可供下次申请使用;注意:这个链表不是通过内部指针连接下一个,而是通过前一块空间的前4or8个字节记录后一个小空间的起始地址抽象连接的;
这样做的目的是循环利用预先开辟的一大块空间,减少用户层申请内存时与系统层的交互,提高效率;
代码实现:
ObjectPool.h
#define _CRT_SECURE_NO_WARNINGS 1
#include
using namespace std;
#ifdef _WIN32
#include
#else
// 包Linux相关头文件,增加代码的可移植性;
#endif
// 直接去堆上按页申请空间 摆脱malloc;
inline static void* SystemAlloc(size_t kpage)
{
#ifdef _WIN32
void* ptr = VirtualAlloc(0, kpage << 13, MEM_COMMIT | MEM_RESERVE, PAGE_READWRITE);
#else
// linux下brk mmap等
#endif
if (ptr == nullptr)
throw std::bad_alloc();
return ptr;
}
template
class ObjectPool
{
char* _memory = nullptr; // 指向大块内存的指针
size_t _remainBytes = 0; // 大块内存在切分过程中剩余字节数
void* _freeList = nullptr; // 还回来过程中链接的自由链表的头指针
public:
T* New()
{
T* obj = nullptr;
//如果之前有申请的空间被释放,那就先从free了的空间拿;(内存池技术)
if (_freeList != nullptr)
{
//头删
//注意!*((void**)_freeList)相当访取_freeList前4or8个字节操作(由32位系统->指针4byte and 64位系统->指针8byte决定);
void* next = *((void**)_freeList);
obj = (T*)_freeList;
_freeList = next;
}
else
{
if (_remainBytes < sizeof(T))
{
// 剩余内存不够一个对象大小时,则重新开大块空间
_remainBytes = 128 * 1024;
//_memory = (char*)malloc(_remainBytes);
//使用SystemAlloc直接向堆申请内存,脱离malloc,方便体现malloc和该ObjectPool的差别;
_memory = (char*)SystemAlloc(_remainBytes >> 13);//char*类型内存可以使其+1or-1的单位操作为1字节,方便内存管理;
if (_memory == nullptr)
{
throw std::bad_alloc();
}
}
//防止某个T类还没当前系统下一个指针大小大 那么就装不下后一个的地址了,这里做特殊处理;至少保证一个对象内足够装的下一个指针大小;
int Objsize = sizeof(T) < sizeof(void*) ? sizeof(void*): sizeof(T);
obj = (T*)_memory;
_memory += Objsize;
_remainBytes -= Objsize;
}
// 定位new,内置类型不处理,自定义类型调用其构造函数;
new(obj)T;
return obj;
}
void Delete(T* obj)
{
//内置类型不处理,自定义类型调用其构析构函数;
obj->~T();
//头插(此处不是真正的删除,而是标志为未使用,挂入自由链表)
*(void**)obj = _freeList;
_freeList = obj;
}
};
ObjectPool.cpp测试
#include
#include "ConcurrentAlloc.h"
//用于测试的类型树节点;
struct TreeNode
{
int _val;
TreeNode* _left;
TreeNode* _right;
TreeNode()
:_val(0)
, _left(nullptr)
, _right(nullptr)
{}
};
void TestObjectPool()
{
// 申请释放的轮次
const size_t Rounds = 5;
// 每轮申请释放多少次
const size_t N = 100000;
std::vector v1;
v1.reserve(N);
size_t begin1 = clock();
for (size_t j = 0; j < Rounds; ++j)
{
for (int i = 0; i < N; ++i)
{
v1.push_back(new TreeNode);
}
for (int i = 0; i < N; ++i)
{
delete v1[i];
}
v1.clear();
}
size_t end1 = clock();
std::vector v2;
v2.reserve(N);
ObjectPool TNPool;
size_t begin2 = clock();
for (size_t j = 0; j < Rounds; ++j)
{
for (int i = 0; i < N; ++i)
{
v2.push_back(TNPool.New());
}
for (int i = 0; i < N; ++i)
{
TNPool.Delete(v2[i]);
}
v2.clear();
}
size_t end2 = clock();
cout << "new cost time:" << end1 - begin1 << endl;
cout << "object pool cost time:" << end2 - begin2 << endl;
}
int mian()
{
TestObjectPool();
return 0;
}*>*>
运行结果:
显然,定长内存池的New空间比new(底层封装的是malloc申请空间)更高效

3.TCmalloc(高并发内存池)整体框架介绍:
谷歌开源项目:TCMalloc (google-perftools) 是用于优化C++写的多线程应用,比glibc 2.3的malloc快。这个模块可以用来让MySQL在高并发下内存占用更加稳定。

ThreadCache
thread cache:线程缓存是每个线程独有的,用于小于256KB的内存的分配(设计规定),线程从这里申请内存不需要加锁,每个线程独享一个cache,这也就是这个并发线程池高效的地方。核心结构是FreeList _freeLists[NFREELIST];eg:_freeLists[2]代表该size对应哈希桶中有n个未使用的obj size大小的小内存块,当需要申请时优先从_freeList中拿无人使用的被挂起的obj空间;
CentralCache
central cache:中心缓存是所有线程所共享,thread cache是按需从central cache中获取的对 象。central cache合适的时机回收thread cache中的对象,避免一个线程占用了太多的内存,而 其他线程的内存吃紧,达到内存分配在多个线程中更均衡的按需调度的目的。central cache是存在竞争的,所以从这里取内存对象是需要加锁,首先这里用的是桶锁,其次只有thread cache的 没有内存对象时才会找central cache,所以这里竞争不会很激烈。其核心结构是SpanList _spanLists[NFREELIST];eg:_spanLists[2]代表该size对应链桶中的n个span,每个span下面挂了n个大小为size的obj小内存块;(size大小是指通过测试和计算,将所需内存大小x字节依据某种对齐规则对其为size字节,使span的链式桶结构数量合适,大小统一)
page cache
page cache:页缓存是在central cache缓存上面的一层缓存,存储的内存是以页为单位存储及分 配的,central cache没有内存对象时,从page cache分配出一定数量的page,并切割成定长大小 的小块内存,分配给central cache。当一个span的几个跨度页的对象都回收以后,page cache 会回收central cache满足条件的span对象,并且合并相邻的页,组成更大的页,缓解内存碎片 的问题。Page中的核心结构是SpanList _spanLists[NPAGES];eg:_spanLists[2]代表该链桶含有n个大小为2页(2*8字节)的span;如果从page[1]到page[128]都没有可用span,那么只能从系统堆直接申请一块大空间放进去,再给central thread层用了;
本文TCmalloc整体项目围绕上述三层结构实现,抽取原项目的小部分核心内容学习;这个项目会用到C/C++、数据结构(链表、哈希桶)、操作系统内存管理、单例模式、多线程、互斥锁 等等方面的知识。
4.代码实现:
Common.h
这是一个通用头文件,包含各种所需要的库文件和三层结构需要的对其数和size-申请数量转换的函数;
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using std::cout;
using std::endl;
#ifdef _WIN32
#include
#else
// ...
#endif
static const size_t MAX_BYTES = 256 * 1024;//ThreadCache中允许申请的最大字节;
static const size_t NFREELIST = 208;//通过对齐计算的thread和central中最大哈希桶下表;
static const size_t NPAGES = 129;//最多128页,为了方便映射哈希,从第1页开始计算;
static const size_t PAGE_SHIFT = 13;//一页==8kb==2^13字节大小 所以 p地址>>PAGE_SHIFT ==PAGE_ID 可相当于将某连续地址以2^13字节对齐,并标上页号方便管理;eg:0x00000000~0x2^13这连续的2^13个地址 经过>> 为PAGE_ID==1,后连续的2^13个地址 经过>> 为PAGE_ID==2;
//多系统编程;
#ifdef _WIN64
typedef unsigned long long PAGE_ID;
#elif _WIN32
typedef size_t PAGE_ID;
#else
// linux
#endif
// 直接去堆上按页申请空间
inline static void* SystemAlloc(size_t kpage)
{
#ifdef _WIN32
void* ptr = VirtualAlloc(0, kpage << 13, MEM_COMMIT | MEM_RESERVE, PAGE_READWRITE);
#else
// linux下brk mmap等
#endif
if (ptr == nullptr)
throw std::bad_alloc();
return ptr;
}
inline static void SystemFree(void* ptr)
{
#ifdef _WIN32
VirtualFree(ptr, 0, MEM_RELEASE);
#else
// sbrk unmmap等
#endif
}
//NextObj(obj) 等价于 *(void**)obj,取obj前4or8个字节(存放下一个小空间地址的位置)进行操作,增加语义;
static void*& NextObj(void* obj)
{
return *(void**)obj;
}
// 管理切分好的小对象的自由链表
class FreeList
{
public:
void Push(void* obj)
{
assert(obj);
// 头插
//*(void**)obj = _freeList;
NextObj(obj) = _freeList;
_freeList = obj;
++_size;
}
//从central中申请一批obj大小的内存块,range插入;
void PushRange(void* start, void* end, size_t n)
{
NextObj(end) = _freeList;
_freeList = start;
_size += n;
}
///threadcache还一段list给central cache
void PopRange(void*& start, void*& end, size_t n)//n==list.size
{
assert(n <= _size);
start = _freeList;
end = start;
for (size_t i = 0; i < n - 1; ++i)
{
end = NextObj(end);
}
_freeList = NextObj(end);
NextObj(end) = nullptr;
_size -= n;
}
void* Pop()
{
assert(_freeList);
// 头删
void* obj = _freeList;
_freeList = NextObj(obj);
--_size;
return obj;
}
bool Empty()
{
return _freeList == nullptr;
}
size_t& MaxSize()
{
return _maxSize;
}
size_t Size()
{
return _size;
}
private:
void* _freeList = nullptr;
size_t _maxSize = 1;//慢开始算法--从1启动;
size_t _size = 0;//当前_freeList桶里的obj小空间个数
};
// 计算对象大小的对齐映射规则 方便控制哈希桶用的数量(不要太多) 便于管理obj小内存空间
class SizeClass
{
public:
// 整体控制在最多10%左右的内碎片浪费的对齐规则;
// [1,128] 8byte对齐 freelist[0,16) eg:1~128字节的obj 按照8byte对齐(eg:1~7字节的对象都放入_freeList[0]) 则1~128字节的obj 需要的桶index为0~16即可;
// [128+1,1024] 16byte对齐 freelist[16,72)
// [1024+1,8*1024] 128byte对齐 freelist[72,128)
// [8*1024+1,64*1024] 1024byte对齐 freelist[128,184)
// [64*1024+1,256*1024] 8*1024byte对齐 freelist[184,208)
/*size_t _RoundUp(size_t size, size_t alignNum)
{
size_t alignSize;
if (size % alignNum != 0)
{
alignSize = (size / alignNum + 1)*alignNum;
}
else
{
alignSize = size;
}
return alignSize;
}*/
// 1-8
//位运算提高效率
static inline size_t _RoundUp(size_t bytes, size_t alignNum)
{
return ((bytes + alignNum - 1) & ~(alignNum - 1));
}
//通过size大小计算对其数函数;
static inline size_t RoundUp(size_t size)
{
if (size <= 128)
{
return _RoundUp(size, 8);
}
else if (size <= 1024)
{
return _RoundUp(size, 16);
}
else if (size <= 8*1024)
{
return _RoundUp(size, 128);
}
else if (size <= 64*1024)
{
return _RoundUp(size, 1024);
}
else if (size <= 256 * 1024)
{
return _RoundUp(size, 8*1024);
}
else
{
return _RoundUp(size, 1< }
}
/*size_t _Index(size_t bytes, size_t alignNum)
{
if (bytes % alignNum == 0)
{
return bytes / alignNum - 1;
}
else
{
return bytes / alignNum;
}
}*/
//位运算提高效率
static inline size_t _Index(size_t bytes, size_t align_shift)
{
return ((bytes + (1 << align_shift) - 1) >> align_shift) - 1;
}
// 通过size计算index位置即映射到哪一个自由链表桶
static inline size_t Index(size_t bytes)
{
assert(bytes <= MAX_BYTES);
// 每个区间有多少个链
static int group_array[4] = { 16, 56, 56, 56 };
if (bytes <= 128){
return _Index(bytes, 3);//3表示按8byte对其
}
else if (bytes <= 1024){
return _Index(bytes - 128, 4) + group_array[0];//4表示按16byte对其, - 128因为前128个字节按照别的对齐规则的,剩下的这些按照自己的对其数对其最后+前面总共的桶数量即可计算自己的index;
}
else if (bytes <= 8 * 1024){
return _Index(bytes - 1024, 7) + group_array[1] + group_array[0];
}
else if (bytes <= 64 * 1024){
return _Index(bytes - 8 * 1024, 10) + group_array[2] + group_array[1] + group_array[0];
}
else if (bytes <= 256 * 1024){
return _Index(bytes - 64 * 1024, 13) + group_array[3] + group_array[2] + group_array[1] + group_array[0];
}
else{
assert(false);
}
return -1;
}
// 一次thread cache从中心缓存获取多少个,池化技术:当thread cache没有可用obj空间时,会向中心缓存申请一批而不是一个;
static size_t NumMoveSize(size_t size)
{
assert(size > 0);
// [2, 512],一次批量移动多少个对象的(慢启动)上限值
// 小对象一次批量上限高
// 小对象一次批量上限低
int num = MAX_BYTES / size;
if (num < 2)
num = 2;
if (num > 512)
num = 512;
return num;
}
// 计算一次向系统获取几个页;当centralCache对应index无可用span时,向pagecache按页大小申请,之后再把申请的span切割成n个index大小的obj内存块;
// 单个对象 8byte
// ...
// 单个对象 256KB
static size_t NumMovePage(size_t size)
{
size_t num = NumMoveSize(size);
size_t npage = num*size;
npage >>= PAGE_SHIFT;
if (npage == 0)
npage = 1;
return npage;
}
};
// 管理多个连续页大块内存跨度结构
struct Span
{
PAGE_ID _pageId = 0; // 大块内存起始页的页号;将申请的viod*通过>>PAGE_SHIFT(8K),映射成数字方便管理和挂桶;
size_t _n = 0; // 页的数量
Span* _next = nullptr; // 双向链表的结构
Span* _prev = nullptr;
size_t _objSize = 0; // 切好的小对象的大小
size_t _useCount = 0; // 切好小块内存,被分配给thread cache的计数,方便回收span,_useCount==0;
void* _freeList = nullptr; // 切好的小块内存的自由链表
bool _isUse = false; // 是否在被使用,方便合并span,减少内存碎片;
};
// 带头双向循环链表 封装Span节点
class SpanList
{
public:
SpanList()
{
_head = new Span;
_head->_next = _head;
_head->_prev = _head;
}
//Begin()和End()模拟了带头双向循环链表;
Span* Begin()
{
return _head->_next;
}
Span* End()
{
return _head;
}
bool Empty()
{
return _head->_next == _head;
}
void PushFront(Span* span)
{
Insert(Begin(), span);
}
Span* PopFront()
{
Span* front = _head->_next;
Erase(front);
return front;
}
//“双向链表实现一个Insert即可高效复用”
void Insert(Span* pos, Span* newSpan)
{
assert(pos);
assert(newSpan);
Span* prev = pos->_prev;
// prev newspan pos
prev->_next = newSpan;
newSpan->_prev = prev;
newSpan->_next = pos;
pos->_prev = newSpan;
}
void Erase(Span* pos)
{
assert(pos);
assert(pos != _head);
Span* prev = pos->_prev;
Span* next = pos->_next;
prev->_next = next;
next->_prev = prev;
}
private:
Span* _head;
public:
std::mutex _mtx; // 桶锁 可能多个threadcache同时访问central中的同一个index桶,加锁-线程安全
};);
ThreadCache.h
thread cache是哈希桶结构,每个桶是一个按桶位置映射大小的内存块对象的自由链表。每个线程都会 有一个thread cache对象,这样每个线程在这里获取对象和释放对象时是无锁的。

申请内存:
- 当内存申请size<=256KB,先获取到线程本地存储的thread cache对象,计算size映射的哈希桶自 由链表下标i。
- 如果自由链表_freeLists[i]中有对象,则直接Pop一个内存对象返回。
- 如果_freeLists[i]中没有对象时,则批量从central cache中获取一定数量的对象,插入到自由链表 并返回一个对象。
释放内存:
2. 当链表的长度过长,则回收一部分内存对象到central cache。
class ThreadCache
{
public:
// 申请和释放内存对象
void* Allocate(size_t size);
void Deallocate(void* ptr, size_t size);
// 从中心缓存获取对象
void* FetchFromCentralCache(size_t index, size_t size);
// 释放对象时,链表过长时,回收内存回到中心缓存
void ListTooLong(FreeList& list, size_t size);
private:
FreeList _freeLists[NFREELIST];
};
// TLS thread local storage TLS技术,使每个线程里的ThreadCache*独享,互不影响,实现高并发;
static _declspec(thread) ThreadCache* pTLSThreadCache = nullptr;
// 管理切分好的小对象的自由链表
class FreeList
{
public:
void Push(void* obj)
{
assert(obj);
// 头插
//*(void**)obj = _freeList;
NextObj(obj) = _freeList;
_freeList = obj;
++_size;
}
void PushRange(void* start, void* end, size_t n)
{
NextObj(end) = _freeList;
_freeList = start;
_size += n;
}
void PopRange(void*& start, void*& end, size_t n)
{
assert(n >= _size);
start = _freeList;
end = start;
for (size_t i = 0; i < n - 1; ++i)
{
end = NextObj(end);
}
_freeList = NextObj(end);
NextObj(end) = nullptr;
_size -= n;
}
void* Pop()
{
assert(_freeList);
// 头删
void* obj = _freeList;
_freeList = NextObj(obj);
--_size;
return obj;
}
bool Empty()
{
return _freeList == nullptr;
}
size_t& MaxSize()
{
return _maxSize;
}
size_t Size()
{
return _size;
}
private:
void* _freeList = nullptr;
size_t _maxSize = 1;
size_t _size = 0;
};
ThreadCache.cpp
#include "CentralCache.h"
//从thradcache 从 central中要内存
void* ThreadCache::FetchFromCentralCache(size_t index, size_t size)
{
// 慢开始反馈调节算法
// 1、最开始不会一次向central cache一次批量要太多,因为要太多了可能用不完
// 2、如果你不要这个size大小内存需求,那么batchNum就会不断增长,直到上限
// 3、size越大,一次向central cache要的batchNum就越小
// 4、size越小,一次向central cache要的batchNum就越大
size_t batchNum = min(_freeLists[index].MaxSize(), SizeClass::NumMoveSize(size));
if (_freeLists[index].MaxSize() == batchNum)
{
_freeLists[index].MaxSize() += 1;
}
//输出型参数 将batchNum个obj小空间从centralcache中带出来;
void* start = nullptr;
void* end = nullptr;
size_t actualNum = CentralCache::GetInstance()->FetchRangeObj(start, end, batchNum, size);
assert(actualNum > 0);
if (actualNum == 1)//就申请到一个obj空间 直接返回给申请的人用
{
assert(start == end);
return start;
}
else//申请了多个obj空间 只返回第一个 则 剩下的插入_freeList留着后面备用;
{
_freeLists[index].PushRange(NextObj(start), end, actualNum-1);
return start;
}
}
//多线程申请
void* ThreadCache::Allocate(size_t size)
{
assert(size <= MAX_BYTES);
size_t alignSize = SizeClass::RoundUp(size);//计算对齐数 相当于需要obj的size
size_t index = SizeClass::Index(size);//计算哈希桶index
if (!_freeLists[index].Empty())//还有剩余直接pop拿走一个
{
return _freeLists[index].Pop();
}
else
{
return FetchFromCentralCache(index, alignSize);//没了 从central中要
}
}
//多线程释放
void ThreadCache::Deallocate(void* ptr, size_t size)
{
assert(ptr);
assert(size <= MAX_BYTES);
// 找对映射的自由链表桶,对象插入进入
size_t index = SizeClass::Index(size);
_freeLists[index].Push(ptr);
//释放完了检查下freelist里的obj,看看需不需要回收到centralcache
// 设定:当链表长度大于一次批量申请的内存时就开始还一段list给central cache
if (_freeLists[index].Size() >= _freeLists[index].MaxSize())
{
ListTooLong(_freeLists[index], size);
}
}
//一段list给central cache
void ThreadCache::ListTooLong(FreeList& list, size_t size)
{
//输出型参数;
void* start = nullptr;
void* end = nullptr;
//先从_freeList中弹出
list.PopRange(start, end, list.MaxSize());
//再收回到central中对应index的Span链表中
CentralCache::GetInstance()->ReleaseListToSpans(start, size);
}
CentralCache.h
central cache也是一个哈希桶结构,他的哈希桶的映射关系跟thread cache是一样的。不同的是他的每 个哈希桶位置挂是SpanList链表结构,不过每个映射桶下面的span中的大内存块被按映射关系切成了一 个个小内存块对象挂在span的自由链表中。

申请内存:
1.当thread cache中没有内存时,就会批量向central cache申请一些内存对象,这里的批量获取对 象的数量使用了类似网络tcp协议拥塞控制的慢开始算法;central cache也有一个哈希映射的 spanlist,spanlist中挂着span,从span中取出对象给thread cache,这个过程是需要加锁的,不 过这里使用的是一个桶锁,尽可能提高效率。
2.central cache映射的spanlist中所有span的都没有内存以后,则需要向page cache申请一个新的 span对象,拿到span以后将span管理的内存按大小切好作为自由链表链接到一起。然后从span 中取对象给thread cache。
3.central cache的中挂的span中use_count记录分配了多少个对象出去,分配一个对象给thread cache,就++use_count。
释放内存:
1.当thread_cache过长或者线程销毁,则会将内存释放回central cache中的,释放回来时-- use_count。当use_count减到0时则表示所有对象都回到了span,则将span释放回page cache, page cache中会对前后相邻的空闲页进行合并。
#include "Common.h"
// 单例模式(饿汉模式)全局就一个CentralCache;
class CentralCache
{
public:
static CentralCache* GetInstance()
{
return &_sInst;
}
// 获取一个非空的span
Span* GetOneSpan(SpanList& list, size_t byte_size);
// 从中心缓存获取一定数量的对象给thread cache
size_t FetchRangeObj(void*& start, void*& end, size_t batchNum, size_t size);
// 将一定数量的obj释放到span跨度
void ReleaseListToSpans(void* start, size_t byte_size);
private:
SpanList _spanLists[NFREELIST];
private:
CentralCache()
{}
CentralCache(const CentralCache&) = delete;
static CentralCache _sInst;
};
CentralCache.cpp
//#include "PageCache.h"
CentralCache CentralCache::_sInst;
// 获取一个非空的span
Span* CentralCache::GetOneSpan(SpanList& list, size_t size)//参数list是某一个确定的index桶
{
// 查看当前的spanlist中是否有还有未分配对象的span
Span* it = list.Begin();
while (it != list.End())
{
if (it->_freeList != nullptr)
{
return it;//这里不需要改it的span中的属性,因为等最后分给threadcache了obj以后 才算其中的内存被分出去了 里面的usecount等才需要改;
}
else
{
it = it->_next;
}
}
// 走到这里说没有空闲span了,只能找page cache要
// 先把central cache的桶锁解掉,这样如果其他线程释放内存对象回来,不会阻塞(你要从page申请了 不能别的线程在这个桶释放)
list._mtx.unlock();
PageCache::GetInstance()->_pageMtx.lock();//整个pagecache结构可能会从index1~index129挨个操作每个桶 因此需要上大锁;
Span* span = PageCache::GetInstance()->NewSpan(SizeClass::NumMovePage(size));
span->_isUse = true;//分跟central的span标记已使用因为马上就要切分给obj用了
span->_objSize = size;//每个span挂的固定小内存块obj大小size
PageCache::GetInstance()->_pageMtx.unlock();
// 对获取span进行切分,不需要加锁,因为这会其他线程访问不到这个span
// 计算span的大块内存的起始地址和大块内存的大小(字节数)
char* start = (char*)(span->_pageId << PAGE_SHIFT);//这里的_pageId是从底层按页申请内存的时候地址转换来的,现在需要用地址就转换回去;
size_t bytes = span->_n << PAGE_SHIFT;
char* end = start + bytes;
// 把大块内存切成自由链表链接起来
// 1、先切一块下来去做头,方便尾插(尾插原因,切出来一般是连续的,那么尾插给到span上挂小obj也是连续,提高内存命中率)
span->_freeList = start;
start += size;
void* tail = span->_freeList;
int i = 1;
while (start < end)
{
++i;
NextObj(tail) = start;
tail = NextObj(tail); // tail = start;
start += size;
}
NextObj(tail) = nullptr;
// 切好span以后,需要把span挂到桶里面去的时候,再加锁
list._mtx.lock();
list.PushFront(span);
return span;
}
// 从中心缓存获取一定数量的对象给thread cache
size_t CentralCache::FetchRangeObj(void*& start, void*& end, size_t batchNum, size_t size)
{
size_t index = SizeClass::Index(size);
_spanLists[index]._mtx.lock();//上桶锁
Span* span = GetOneSpan(_spanLists[index],size);
assert(span);
assert(span->_freeList);
// 从span中获取batchNum个对象
// 如果不够batchNum个,有多少拿多少
start = span->_freeList;
end = start;
int n = 1;//n为实际拿到的数量,start直接给了所以起始值为1;
for (int i = 0; i < batchNum - 1; i++)
{
if (NextObj(end) == nullptr) break;
end = NextObj(end);
++n;
}
//span被切出去给obj使用了 span的一些属性得改变了;
span->_useCount += n;
span->_freeList = NextObj(end);
NextObj(end) = nullptr;
_spanLists[index]._mtx.unlock();
return n;
}
void CentralCache::ReleaseListToSpans(void* start, size_t size)
{
size_t index = SizeClass::Index(size);
_spanLists[index]._mtx.lock();
while (start)
{
void* next = NextObj(start);
Span* span = PageCache::GetInstance()->MapObjectToSpan(start);
//小obj头插入span中的_freeList
NextObj(start) = span->_freeList;
span->_freeList = start;
span->_useCount--;
// 说明span的切分出去的所有小块内存都回来了
// 这个span就可以再回收给page cache,pagecache可以再尝试去做前后页的合并
if (span->_useCount == 0)
{
_spanLists[index].Erase(span);
span->_freeList = nullptr;
span->_next = nullptr;
span->_prev = nullptr;
// 释放span给page cache时,使用page cache的锁就可以了
// 这时把桶锁解掉 不影响其他线程对该index的central操作;
_spanLists[index]._mtx.unlock();
PageCache::GetInstance()->_pageMtx.lock();
PageCache::GetInstance()->ReleaseSpanToPageCache(span);//还给page和page是否需要合并其中的span减少内存碎片都在这函数里
PageCache::GetInstance()->_pageMtx.unlock();
_spanLists[index]._mtx.lock();
}
start = next;
}
_spanLists[index]._mtx.unlock();
}
PageMap.h
使用自己定义的PageMap哈希直接映射,避免stl的线程安全,提高效率;
#include"Common.h"
// Single-level array
template
class TCMalloc_PageMap1 {
private:
static const int LENGTH = 1 << BITS;
void** array_;
public:
typedef uintptr_t Number;
//explicit TCMalloc_PageMap1(void* (*allocator)(size_t)) {
explicit TCMalloc_PageMap1() {
//array_ = reinterpret_cast((*allocator)(sizeof(void*) << BITS));
size_t size = sizeof(void*) << BITS;
size_t alignSize = SizeClass::_RoundUp(size, 1 << PAGE_SHIFT);
array_ = (void**)SystemAlloc(alignSize >> PAGE_SHIFT);
memset(array_, 0, sizeof(void*) << BITS);
}
// Return the current value for KEY. Returns NULL if not yet set,
// or if k is out of range.
void* get(Number k) const {
if ((k >> BITS) > 0) {
return NULL;
}
return array_[k];
}
// REQUIRES "k" is in range "[0,2^BITS-1]".
// REQUIRES "k" has been ensured before.
//
// Sets the value 'v' for key 'k'.
void set(Number k, void* v) {
array_[k] = v;
}
};
// Two-level radix tree
template
class TCMalloc_PageMap2 {
private:
// Put 32 entries in the root and (2^BITS)/32 entries in each leaf.
static const int ROOT_BITS = 5;
static const int ROOT_LENGTH = 1 << ROOT_BITS;
static const int LEAF_BITS = BITS - ROOT_BITS;
static const int LEAF_LENGTH = 1 << LEAF_BITS;
// Leaf node
struct Leaf {
void* values[LEAF_LENGTH];
};
Leaf* root_[ROOT_LENGTH]; // Pointers to 32 child nodes
void* (*allocator_)(size_t); // Memory allocator
public:
typedef uintptr_t Number;
//explicit TCMalloc_PageMap2(void* (*allocator)(size_t)) {
explicit TCMalloc_PageMap2() {
//allocator_ = allocator;
memset(root_, 0, sizeof(root_));
PreallocateMoreMemory();
}
void* get(Number k) const {
const Number i1 = k >> LEAF_BITS;
const Number i2 = k & (LEAF_LENGTH - 1);
if ((k >> BITS) > 0 || root_[i1] == NULL) {
return NULL;
}
return root_[i1]->values[i2];
}
void set(Number k, void* v) {
const Number i1 = k >> LEAF_BITS;
const Number i2 = k & (LEAF_LENGTH - 1);
ASSERT(i1 < ROOT_LENGTH);
root_[i1]->values[i2] = v;
}
bool Ensure(Number start, size_t n) {
for (Number key = start; key <= start + n - 1;) {
const Number i1 = key >> LEAF_BITS;
// Check for overflow
if (i1 >= ROOT_LENGTH)
return false;
// Make 2nd level node if necessary
if (root_[i1] == NULL) {
//Leaf* leaf = reinterpret_cast((*allocator_)(sizeof(Leaf)));
//if (leaf == NULL) return false;
static ObjectPool leafPool;
Leaf* leaf = (Leaf*)leafPool.New();
memset(leaf, 0, sizeof(*leaf));
root_[i1] = leaf;
}
// Advance key past whatever is covered by this leaf node
key = ((key >> LEAF_BITS) + 1) << LEAF_BITS;
}
return true;
}
void PreallocateMoreMemory() {
// Allocate enough to keep track of all possible pages
Ensure(0, 1 << BITS);
}
};
// Three-level radix tree
template
class TCMalloc_PageMap3 {
private:
// How many bits should we consume at each interior level
static const int INTERIOR_BITS = (BITS + 2) / 3; // Round-up
static const int INTERIOR_LENGTH = 1 << INTERIOR_BITS;
// How many bits should we consume at leaf level
static const int LEAF_BITS = BITS - 2 * INTERIOR_BITS;
static const int LEAF_LENGTH = 1 << LEAF_BITS;
// Interior node
struct Node {
Node* ptrs[INTERIOR_LENGTH];
};
// Leaf node
struct Leaf {
void* values[LEAF_LENGTH];
};
Node* root_; // Root of radix tree
void* (*allocator_)(size_t); // Memory allocator
Node* NewNode() {
Node* result = reinterpret_cast((*allocator_)(sizeof(Node)));
if (result != NULL) {
memset(result, 0, sizeof(*result));
}
return result;
}
public:
typedef uintptr_t Number;
explicit TCMalloc_PageMap3(void* (*allocator)(size_t)) {
allocator_ = allocator;
root_ = NewNode();
}
void* get(Number k) const {
const Number i1 = k >> (LEAF_BITS + INTERIOR_BITS);
const Number i2 = (k >> LEAF_BITS) & (INTERIOR_LENGTH - 1);
const Number i3 = k & (LEAF_LENGTH - 1);
if ((k >> BITS) > 0 ||
root_->ptrs[i1] == NULL || root_->ptrs[i1]->ptrs[i2] == NULL) {
return NULL;
}
return reinterpret_cast(root_->ptrs[i1]->ptrs[i2])->values[i3];
}
void set(Number k, void* v) {
ASSERT(k >> BITS == 0);
const Number i1 = k >> (LEAF_BITS + INTERIOR_BITS);
const Number i2 = (k >> LEAF_BITS) & (INTERIOR_LENGTH - 1);
const Number i3 = k & (LEAF_LENGTH - 1);
reinterpret_cast(root_->ptrs[i1]->ptrs[i2])->values[i3] = v;
}
bool Ensure(Number start, size_t n) {
for (Number key = start; key <= start + n - 1;) {
const Number i1 = key >> (LEAF_BITS + INTERIOR_BITS);
const Number i2 = (key >> LEAF_BITS) & (INTERIOR_LENGTH - 1);
// Check for overflow
if (i1 >= INTERIOR_LENGTH || i2 >= INTERIOR_LENGTH)
return false;
// Make 2nd level node if necessary
if (root_->ptrs[i1] == NULL) {
Node* n = NewNode();
if (n == NULL) return false;
root_->ptrs[i1] = n;
}
// Make leaf node if necessary
if (root_->ptrs[i1]->ptrs[i2] == NULL) {
Leaf* leaf = reinterpret_cast((*allocator_)(sizeof(Leaf)));
if (leaf == NULL) return false;
memset(leaf, 0, sizeof(*leaf));
root_->ptrs[i1]->ptrs[i2] = reinterpret_cast(leaf);
}
// Advance key past whatever is covered by this leaf node
key = ((key >> LEAF_BITS) + 1) << LEAF_BITS;
}
return true;
}
void PreallocateMoreMemory() {
}
};*>*>*>*>*>*>**>
PageCache.h

申请内存:
- 当central cache向page cache申请内存时,page cache先检查对应位置有没有span,如果没有 则向更大页寻找一个span,如果找到则分裂成两个。比如:申请的是4页page,4页page后面没 有挂span,则向后面寻找更大的span,假设在10页page位置找到一个span,则将10页page span分裂为一个4页page span和一个6页page span。
- 如果找到_spanList[128]都没有合适的span,则向系统使用mmap、brk或者是VirtualAlloc等方式 申请128页page span挂在自由链表中,再重复1中的过程。 3
- 需要注意的是central cache和page cache 的核心结构都是spanlist的哈希桶,但是他们是有本质 区别的,central cache中哈希桶,是按跟thread cache一样的大小对齐关系映射的,他的spanlist 中挂的span中的内存都被按映射关系切好链接成小块内存的自由链表。而page cache 中的 spanlist则是按下标桶号映射的,也就是说第i号桶中挂的span都是i页内存。
释放内存:
如果central cache释放回一个span,则依次寻找span的前后page id的没有在使用的空闲span ,看是否可以合并,如果合并继续向前寻找。这样就可以将切小的内存合并收缩成大的span,减少内存碎片。
#include "Common.h"
#include "ObjectPool.h"
#include "PageMap.h"
class PageCache
{
public:
static PageCache* GetInstance()
{
return &_sInst;
}
// 获取从对象到span的映射
Span* MapObjectToSpan(void* obj);
// 释放空闲span回到Pagecache,并合并相邻的span
void ReleaseSpanToPageCache(Span* span);
// 获取一个K页的span
Span* NewSpan(size_t k);
std::mutex _pageMtx;
private:
SpanList _spanLists[NPAGES];
ObjectPool _spanPool;//这里用上了之前编写的ObjectPool定长内存池 用来New(span)脱离malloc
//std::unordered_map _idSpanMap;
//std::map _idSpanMap;
TCMalloc_PageMap1<32 - PAGE_SHIFT> _idSpanMap;
PageCache()
{}
PageCache(const PageCache&) = delete;
static PageCache _sInst;
};,>,>
PageCache.cpp
PageCache PageCache::_sInst;
// 获取一个K页的span
Span* PageCache::NewSpan(size_t k)
{
assert(k > 0);
// 大于128 page的直接向堆申请
if (k > NPAGES - 1)
{
void* ptr = SystemAlloc(k);
//Span* span = new Span;
Span* span = _spanPool.New();
span->_pageId = (PAGE_ID)ptr >> PAGE_SHIFT;
span->_n = k;
//_idSpanMap[span->_pageId] = span;
_idSpanMap.set(span->_pageId, span);
return span;
}
// 先检查第k个桶里面有没有span
if (!_spanLists[k].Empty())
{
Span* kSpan = _spanLists[k].PopFront();
// 建立id和span的映射,方便central cache回收小块内存时,查找对应的span
for (PAGE_ID i = 0; i < kSpan->_n; ++i)
{
//_idSpanMap[kSpan->_pageId + i] = kSpan;
_idSpanMap.set(kSpan->_pageId + i, kSpan);
}
return kSpan;
}
// 检查一下后面的桶里面有没有span,如果有可以把他它进行切分
for (size_t i = k + 1; i < NPAGES; ++i)
{
if (!_spanLists[i].Empty())
{
Span* nSpan = _spanLists[i].PopFront();//nSpan代表切割以后剩下的span,他还是未使用的,还在pagecache中是连续的,所以映射首尾即可
//Span* kSpan = new Span;
Span* kSpan = _spanPool.New();//kSpan代表从某个大内存n+k Span中切出来的kSpan,他要给到central之后进行obj切割,进而往thread给;
// 在nSpan的头部切一个k页下来
// k页span返回
// nSpan再挂到对应映射的位置
kSpan->_pageId = nSpan->_pageId;
kSpan->_n = k;
nSpan->_pageId += k;
nSpan->_n -= k;
_spanLists[nSpan->_n].PushFront(nSpan);
// 存储nSpan的首尾页号跟nSpan映射,方便page cache回收内存时进行的合并查找
//_idSpanMap[nSpan->_pageId] = nSpan;
//_idSpanMap[nSpan->_pageId + nSpan->_n - 1] = nSpan;
_idSpanMap.set(nSpan->_pageId, nSpan);
_idSpanMap.set(nSpan->_pageId + nSpan->_n - 1, nSpan);
// 建立id和kSpan的映射,方便central cache回收小块内存时,查找对应的span
for (PAGE_ID i = 0; i < kSpan->_n; ++i)
{
//_idSpanMap[kSpan->_pageId + i] = kSpan;
_idSpanMap.set(kSpan->_pageId + i, kSpan);
}
return kSpan;
}
}
// 走到这个位置就说明后面没有大页的span了
// 这时就去找堆要一个128页的span
//Span* bigSpan = new Span;
Span* bigSpan = _spanPool.New();
void* ptr = SystemAlloc(NPAGES - 1);
bigSpan->_pageId = (PAGE_ID)ptr >> PAGE_SHIFT;
bigSpan->_n = NPAGES - 1;
_spanLists[bigSpan->_n].PushFront(bigSpan);
return NewSpan(k);
}
//将一个obj小内存块它对应的Span*找到(通过转换成page_id再map出Span*)
Span* PageCache::MapObjectToSpan(void* obj)
{
PAGE_ID id = ((PAGE_ID)obj >> PAGE_SHIFT);
/*std::unique_lock lock(_pageMtx);
auto ret = _idSpanMap.find(id);
if (ret != _idSpanMap.end())
{
return ret->second;
}
else
{
assert(false);
return nullptr;
}*/
auto ret = (Span*)_idSpanMap.get(id);
assert(ret != nullptr);
return ret;
}
//从central向page归还span大块内存(这个Span的 usecount==0了即分出去的小obj都还回来了),归还Span并尝试合并!
void PageCache::ReleaseSpanToPageCache(Span* span)
{
// 大于128 page的直接还给堆
if (span->_n > NPAGES - 1)
{
void* ptr = (void*)(span->_pageId << PAGE_SHIFT);
SystemFree(ptr);
//delete span;
_spanPool.Delete(span);
return;
}
// 对span前后的页,尝试进行合并,缓解内存碎片问题
while (1)
{
PAGE_ID prevId = span->_pageId - 1;
// 前面的页号没有,不合并了
auto ret = (Span*)_idSpanMap.get(prevId);
if (ret == nullptr)
{
break;
}
// 前面相邻页的span在使用,不合并了
Span* prevSpan = ret;
if (prevSpan->_isUse == true)
{
break;
}
// 合并出超过128页的span没办法管理,不合并了
if (prevSpan->_n + span->_n > NPAGES - 1)
{
break;
}
span->_pageId = prevSpan->_pageId;
span->_n += prevSpan->_n;
_spanLists[prevSpan->_n].Erase(prevSpan);
//delete prevSpan;
_spanPool.Delete(prevSpan);
}
// 向后合并
while (1)
{
PAGE_ID nextId = span->_pageId + span->_n;
/*auto ret = _idSpanMap.find(nextId);
if (ret == _idSpanMap.end())
{
break;
}*/
auto ret = (Span*)_idSpanMap.get(nextId);
if (ret == nullptr)
{
break;
}
Span* nextSpan = ret;
if (nextSpan->_isUse == true)
{
break;
}
if (nextSpan->_n + span->_n > NPAGES - 1)
{
break;
}
span->_n += nextSpan->_n;
_spanLists[nextSpan->_n].Erase(nextSpan);
//delete nextSpan;
_spanPool.Delete(nextSpan);
}
//合并的大内存块 插回Pagecache中 设置为未使用(未分到central中)状态;
_spanLists[span->_n].PushFront(span);
span->_isUse = false;
//_idSpanMap[span->_pageId] = span;
//_idSpanMap[span->_pageId+span->_n-1] = span;
//记录前后页号方便下次合并;
_idSpanMap.set(span->_pageId, span);
_idSpanMap.set(span->_pageId + span->_n - 1, span);
}
ConcurrentAlloc.h
#include "Common.h"
#include "ThreadCache.h"
#include "PageCache.h"
#include "ObjectPool.h"
//tcmallo
static void* ConcurrentAlloc(size_t size)
{
//一次申请内存大于thread最大的256kb,则直接向page层按页直接申请,不需要经过Thread层;
if (size > MAX_BYTES)
{
size_t alignSize = SizeClass::RoundUp(size);
size_t kpage = alignSize >> PAGE_SHIFT;
PageCache::GetInstance()->_pageMtx.lock();
Span* span = PageCache::GetInstance()->NewSpan(kpage);
span->_objSize = size;//这个span就是为了_objsize单位内存而申请的
PageCache::GetInstance()->_pageMtx.unlock();
void* ptr = (void*)(span->_pageId << PAGE_SHIFT);
return ptr;
}
else
{
// 通过TLS 每个线程无锁的获取自己的专属的ThreadCache对象
if (pTLSThreadCache == nullptr)
{
static ObjectPool tcPool;//只需要一个tcpool,用于调用New,所以设置成静态;
//pTLSThreadCache = new ThreadCache;
pTLSThreadCache = tcPool.New();
}
return pTLSThreadCache->Allocate(size);
}
}
//tcfree
static void ConcurrentFree(void* ptr)
{
Span* span = PageCache::GetInstance()->MapObjectToSpan(ptr);
size_t size = span->_objSize;
if (size > MAX_BYTES)//证明这个Span直接是按页从page申请的_objsize>MAX_SIZE,没经过thread,那么直接ReleaseSpanToPageCache
{
PageCache::GetInstance()->_pageMtx.lock();
PageCache::GetInstance()->ReleaseSpanToPageCache(span);
PageCache::GetInstance()->_pageMtx.unlock();
}
else
{
assert(pTLSThreadCache);
pTLSThreadCache->Deallocate(ptr, size);
}
}
5.测试文件:
Test.cpp
// ntimes 一轮申请和释放内存的次数
// rounds 轮次
void BenchmarkMalloc(size_t ntimes, size_t nworks, size_t rounds)
{
std::vector vthread(nworks);
std::atomic malloc_costtime = 0;
std::atomic free_costtime = 0;
for (size_t k = 0; k < nworks; ++k)
{
vthread[k] = std::thread([&, k]() {
std::vector v;
v.reserve(ntimes);
for (size_t j = 0; j < rounds; ++j)
{
size_t begin1 = clock();
for (size_t i = 0; i < ntimes; i++)
{
//v.push_back(malloc(16));
v.push_back(malloc((16 + i) % 8192 + 1));
}
size_t end1 = clock();
size_t begin2 = clock();
for (size_t i = 0; i < ntimes; i++)
{
free(v[i]);
}
size_t end2 = clock();
v.clear();
malloc_costtime += (end1 - begin1);
free_costtime += (end2 - begin2);
}
});
}
for (auto& t : vthread)
{
t.join();
}
printf("%u个线程并发执行%u轮次,每轮次malloc %u次: 花费:%u msn",
nworks, rounds, ntimes, malloc_costtime.load());
printf("%u个线程并发执行%u轮次,每轮次free %u次: 花费:%u msn",
nworks, rounds, ntimes, free_costtime.load());
printf("%u个线程并发malloc&free %u次,总计花费:%u msn",
nworks, nworks*rounds*ntimes, malloc_costtime.load() + free_costtime.load());
}
// 单轮次申请释放次数 线程数 轮次
void BenchmarkConcurrentMalloc(size_t ntimes, size_t nworks, size_t rounds)
{
std::vector vthread(nworks);
std::atomic malloc_costtime = 0;
std::atomic free_costtime = 0;
for (size_t k = 0; k < nworks; ++k)
{
vthread[k] = std::thread([&]() {
std::vector v;
v.reserve(ntimes);
for (size_t j = 0; j < rounds; ++j)
{
size_t begin1 = clock();
for (size_t i = 0; i < ntimes; i++)
{
//v.push_back(ConcurrentAlloc(16));
v.push_back(ConcurrentAlloc((16 + i) % 8192 + 1));
}
size_t end1 = clock();
size_t begin2 = clock();
for (size_t i = 0; i < ntimes; i++)
{
ConcurrentFree(v[i]);
}
size_t end2 = clock();
v.clear();
malloc_costtime += (end1 - begin1);
free_costtime += (end2 - begin2);
}
});
}
for (auto& t : vthread)
{
t.join();
}
printf("%u个线程并发执行%u轮次,每轮次concurrent alloc %u次: 花费:%u msn",
nworks, rounds, ntimes, malloc_costtime.load());
printf("%u个线程并发执行%u轮次,每轮次concurrent dealloc %u次: 花费:%u msn",
nworks, rounds, ntimes, free_costtime.load());
printf("%u个线程并发concurrent alloc&dealloc %u次,总计花费:%u msn",
nworks, nworks*rounds*ntimes.load(), malloc_costtime + free_costtime.load());
}
int main()
{
size_t n = 10000;
cout << "==========================================================" << endl;
BenchmarkConcurrentMalloc(n, 4, 10);
cout << endl << endl;
BenchmarkMalloc(n, 4, 10);
cout << "==========================================================" << endl;
return 0;
}*>*>
malloc与tcmallo测试对比结果

总结
在整体框架编写完毕后,进行测试对比并不能体现tcmalloc比malloc效率高,如下图;但是在tcmalloc进行 map(Span*,PAGE_ID),这个映射采用基数树的优化后效率大大提高,超过了malloc。

不高效存在性能瓶颈的原因

根据测试,map的find越慢,会导致其lock()越慢,因此map中的find占了整体的15%,加锁解锁的过程占据了程序运行的20%times,这就是未优化的性能瓶颈;优化前Span*和page_id的映射使用stl标准库中的unorder_map,是非线程安全的,需要加锁保证线程安全; 优化了后使用PAGE_MAP 设计原理是直接开满page_id所有范围的空间,采取直接映射;这样即便是多线程也不需要加锁;
不加锁的原因
1.两个线程对map中不同的位置读写:因为两个线程在对基数树map一个读,一个写的时候,相应空间早都开好了,不会改变结构,因此读写互不影响,一个在自己的地方读,一个在自己的地方写,而STL容器中map红黑树写入会旋转,unorder_map哈希写入也涉及增容,结构有可能会改变,因此两个位置的读写有可能互相影响导致线程不安全;
2.两个线程对map中相同的位置写:因为写只会在NewSpan和ReleaseSpanToPageCache中,一个是central没有span了从pagecache申请,一个是central 把没使用的usecount==0的span大块内存还给paghecache,因为page只有有span和无span两种状态这两个函数不可能在两个线程中同时执行
3.两个线程对map中相同的位置读:因为读只会在ConcurrentFree和ReleaseListToSpans中,对于同一个位置index,肯定是先ConcurrentFree(void*obj),之后objfree到一定的量(_freeLists[index].Size() >= _freeLists[index].MaxSize(慢开始的maxsize))时,再调用ReleaseListToSpans将freelist[index]从threadcache还给centralcache的,也不会两个线程同时发生;
- stl的map中的find会依次遍历O(n),而直接映射的时间效率是O(1),相当于以部分空间换取时间的一种举措;
优化了stl中map.find()慢的问题同时不需要加锁了,两个主要问题在牺牲点空间的情况下完美解决,因此性能瓶颈得到优化,tcmalloc高效与malloc。
-
C语言内存池使用2025-12-11 121
-
nginx内存池源码设计2023-11-13 1396
-
如何实现一个高性能内存池2023-11-10 1489
-
高并发内存池项目实现2023-11-09 1713
-
删除静态内存池是用rt_mp_detach还是rt_mp_delete2022-11-22 706
-
RT-Thread内存管理之内存池实现分析2022-10-17 2608
-
C++内存池的设计与实现2022-09-23 1542
-
详解内存池技术的原理与实现2022-05-20 5673
-
关于RT-Thread内存管理的内存池简析2022-04-06 3633
-
内存池的概念和实现原理概述2021-12-17 1638
-
【每日一练】第十六节:内存池的使用2021-09-08 7605
-
Linux 内存池源码浅析2019-04-02 618
全部0条评论

快来发表一下你的评论吧 !
