

位置控制和力控制的差异在哪里
描述
六维力传感器是机器人力控解决方案中应用最广泛的传感器之一,其性能更好,成本也相对较高。通过使用六维力传感器,URe系列机器人可以更好地感知其操作环境,从而进行更精确的操作,提高生产效率和质量。
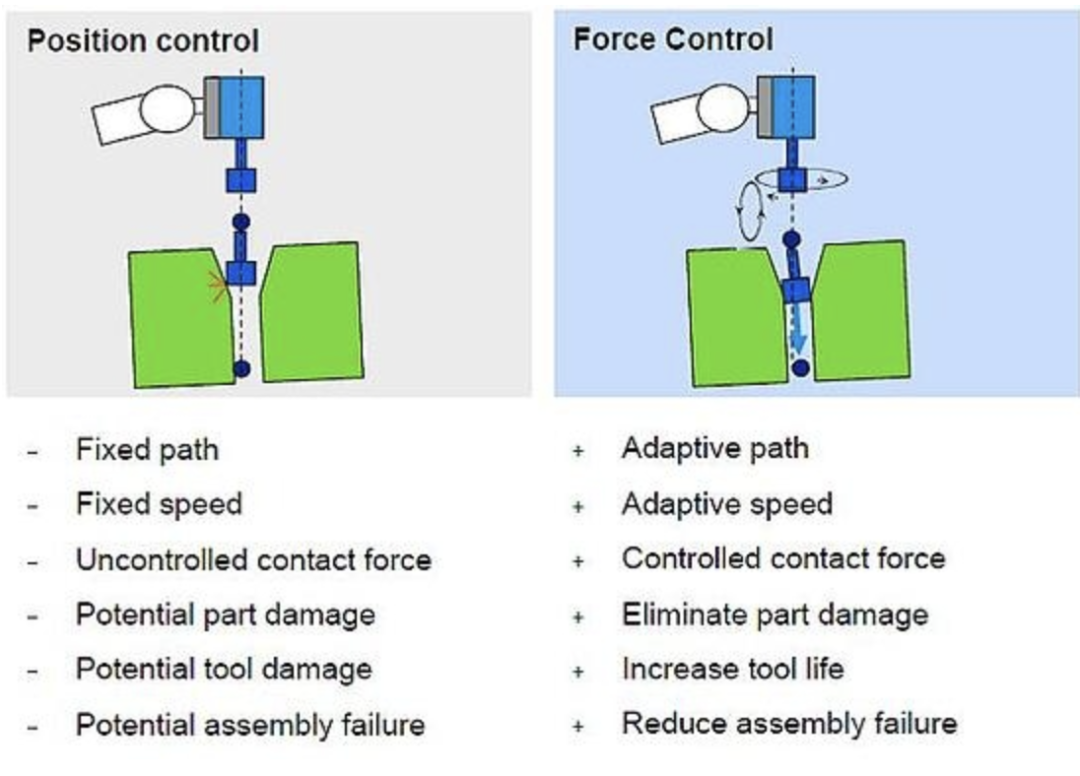
机器人位置控制和力控制的主要区别在于它们各自的主要控制目标和应用场景。
位置控制主要关注的是机器人末端执行器的位置和姿态。在位置控制模式下,机器人会严格按照预先设定的位置轨迹进行运动。
这种控制方式主要用于那些对精度和稳定性要求较高的任务,例如焊接、装配等。在位置控制中,如果机器人遇到阻碍,如遇到墙壁或其他物体,机器人的力量控制会启动,以避免对机器人和环境造成损害。
力控制的主要目标是控制机器人与环境之间的作用力。在力控制模式下,当机器人遇到阻碍时,它会智能地调整预设位置轨迹,从而消除内力。
这种方法更注重的是机器人与环境之间的交互,而不仅仅是机器人的运动轨迹。
位置控制和力控制在以下方面存在差异:
- 控制目标:位置控制的目标是使机器人的末端执行器达到预设的位置和姿态,而力控制的目标是使机器人与环境之间的作用力在可接受的范围内。
- 应用场景:位置控制适用于对精度和稳定性要求较高的任务,如焊接、装配等。力控制则更适用于人机协作、康复训练和柔顺生产等领域。
3.安全性:在位置控制中,如果机器人遇到阻碍,机器人的力量控制会启动,以避免对机器人和环境造成损害。而在力控制中,机器人会智能地调整预设位置轨迹,从而消除内力,安全性更高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STMHAL库的USB每次插拔时识别位置在哪里?2025-03-07 510
-
请问蜂鸣器的这两种下拉的具体差异在哪里?2019-06-12 1029
-
NANDFLASH烧写的位置在哪里?2020-03-26 1168
-
serdes图书馆的位置在哪里2020-05-20 1181
-
三相系统不同测量连接之间的差异在哪里?2021-05-10 2019
-
一千元与一万元电视差异到底在哪里2019-08-20 4539
-
微控制器的主要应用在哪里2020-10-14 10953
-
什么是机器人的力控制?有力控制后还需要位置控制吗2020-12-26 1623
-
雷达信号有什么特点?和通信信号的差异在哪里呢?2021-03-04 15790
-
RTK和GPS定位的区别在哪里?2021-05-08 3094
-
网线有无屏蔽层的差异在哪里2022-12-27 2963
-
远程工具在哪里打开?使用教程2023-05-15 2816
-
PLC和运动控制器的比较,在哪些要求下选用运动控制器?2023-08-08 2594
-
贴片电容与贴片电阻的本质差异在哪里?2024-08-27 1770
-
闭环控制系统的位置反馈元件应装在哪里2024-09-12 2826
全部0条评论

快来发表一下你的评论吧 !
