

化学燃料为微型机器人提供超强动力!
描述
近年来,随着科技的飞速发展,机器人技术在各个行业中得到广泛应用。机器人不仅在生产制造领域发挥着巨大作用,还在医疗保健、航空航天、军事防务等领域展现出了强大的潜力。而与此同时,微型机器人也逐渐成为科技产业中备受瞩目的一环。
在自然界中,我们常常可以看到,昆虫的力量和耐力与其娇小的身躯不相称,以蚂蚁为例,它可以携带10—50倍于自身重量的东西。然而,昆虫大小的微型机器人却很难如昆虫般灵活有力,这是因为微型机器人的动力传输和动力转换问题还尚未得到解决。日前,美国康奈尔大学研究人员将柔性微致动器与高能量密度化学燃料相结合,制造出一种昆虫大小的燃料驱动四足机器人。该项目由康奈尔大学工程学院机械和航空航天工程副教授Robert Shepherd负责。
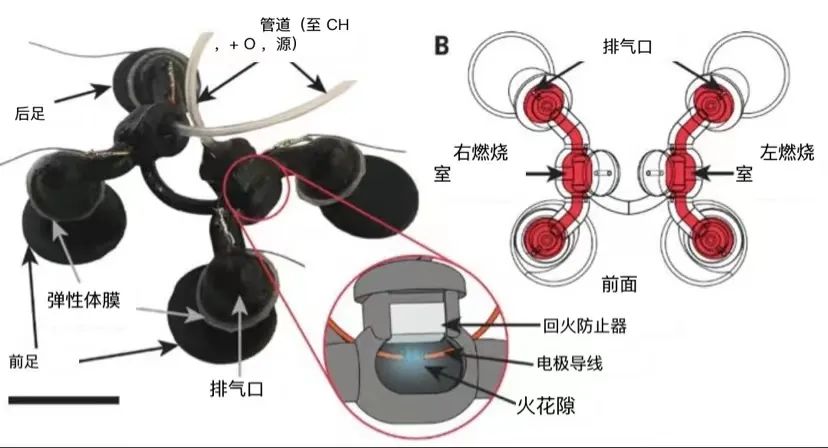
该四足机器人大小只有2.54厘米长,重约325毫克,由阻燃树脂3D打印而成,它们的身体包含一对独立的燃烧室,通向四个作为脚的致动器。每个致动器都是一个中空的圆柱体,底部覆盖着一块硅胶,就像鼓皮一样。这些执行器能达到9.5牛的力,而类似大小的电动驱动的机器人只能达到0.2牛。
机器人使用机外电子设备在燃烧室中产生火花,以点燃预混合的甲烷和氧气。由此产生的燃烧反应使驱动器上的鼓皮膨胀,机器人弹到空中。只需要一点燃料和一些高频火花,机器人就能在地面上飞驰而过。多一点燃料,少一点火花,机器人就会减速跳跃。当燃料完全打开,给机器人一个大的火花,它会在空中跳跃高约60厘米,大约是它身体长度的20倍。
机器人微致动器的工作频率大于100赫兹,实现140%的位移,并展示了22倍于其自重的有效载荷。通过转动旋钮和改变燃料输入,操作员可以调整火花的速度和频率,或进行实时燃料供给,触发响应的动态范围。
罗伯特教授指出,由化学燃料提供动力运动的微型机器人目前还无法实现规模生产。研究人员计划将更多的执行器串联成并行阵列,这样它们就可以在宏观尺度上产生非常精细和非常有力的关节。研究人员还计划讲体外连接气体燃料转变为机器人自身携带燃料装置和电子设备,实现创造一个不受束缚的机器人。
-
面向狭窄腔道医疗作业的微型机器人2024-01-19 827
-
基于微流控和浸渍密封技术的微型机器人2023-01-03 1571
-
微型机器人由哪些部分组成2021-09-10 1648
-
爬壁微型机器人的新型建造方法2021-03-29 2300
-
选择微型机器人电机需要考虑什么?2021-01-22 2208
-
微型机器人关节使用超声波电机的优势2020-11-02 2691
-
详谈仿白细胞微型机器人的应用2020-08-06 1123
-
制造HAMR早期版本和其他微型机器人弹出式制造流程2020-06-17 2582
-
微型机器人会给我们的生活带来什么影响2019-10-29 3860
-
微型机器人可以给我们带来什么好处2019-10-24 9386
-
预测2026年微型机器人市场将达20亿美元2019-07-29 1336
-
穿肠过肚微型机器人:未来医疗的神奇法宝2015-06-03 3298
-
血管微型机器人无损伤内驱动方法2009-09-08 668
-
血管微型机器人无损伤体内驱动方法2009-06-28 2266
全部0条评论

快来发表一下你的评论吧 !
