

深度解析汽车的车载通信技术
通信网络
描述
作者 / 阿宝
一、 汽车EE架构从分布式向域集中变化,推动通信架构升级
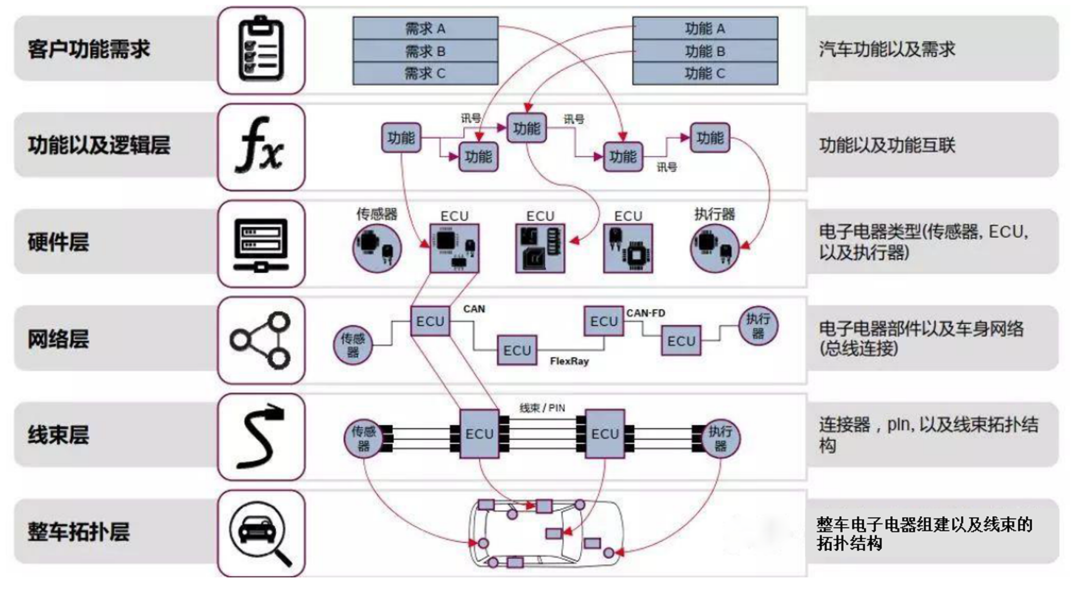
电子电气架构在2007年由德尔福(DELPHI)首先提出E/E架构的概念,具体就是在功能需求、法规和设计要求等特定约束下,把汽车里的传感器、中央处理器、电子电气分配系统、软件硬件通过技术手段整合在一起;通过这种结构,将动力总成、传动系统、信息娱乐系统等信息转化为实际的电源分配的物理布局、信号网络、数据网络、诊断、电源管理等电子电气解决方案。
由分布式 ECU 向域控制/中央集中架构方向发展。从博世对 E/E 架构定义来看, 汽车 E/E 架构的升级路径表现为分布式(模块化→集成化)、 域集中(域控制集中→跨域融合)、 中央集中式(车载电脑→车-云计算)。
即为分布式 ECU(每个功能对应一个 ECU)逐渐模块化、集成向域控制器(一般按照动力域、底盘域、车身域、信息娱乐域和 ADAS 域等),然后部分域开始跨域融合发展(如底盘和动力域功能安全、信息安全相似),并发展整合为中央计算平台(即一个电脑),最后向云计算和车端计算(中央计算平台)发展。其中车端计算主要用于车内部的实时处理,而云计算作为车端计算的补充,为智能汽车提供非实时性(如座舱部分场景可允许微秒级别的延迟)的数据交互和运算处理。
目前我们正处于从过去的分布式EE架构迈向域集中式EE架构的转变过程中,预计到2025年左右就会完成这一转变。从2025年以后,将开启跨域的融合时代,也就是转变为“中央+区域”(Central & Zonal)计算的EE架构时代。
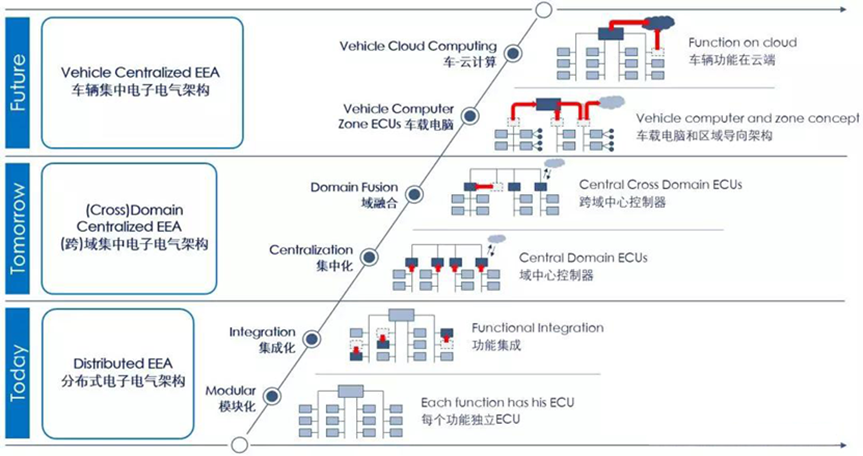
博世对未来汽车电子电气架构发展趋势的观点
1. 当前,车企正在应用的第一类 E/E 架构,采用分布式设计,分为模块化和集成化两个阶段:
模块化阶段:汽车的每个功能拥有独立 ECU, 现在大多数汽车处于该阶段;
集成化阶段:车辆的设计开始进行功能集成,进而带来 ECU 的被集成。
2. 今后,车企将采用第二类 E/E 架构,采用(跨)域集中式设计,分为集中化和域融合两个阶段,如大众由搭载来自200个不同供应商的70个ECU“减少到三台中央车载电脑”来减少整车软件的复杂性:
集中化阶段:指开始出现了域中心控制器;
域融合阶段:对应地开始出现跨域中心控制器。特斯拉 Model 3 正是域融合阶段的代表车型。
3. 未来,E/E 架构将发展为第三类架构,即车辆集中 E/E 架构,分为车载电脑和车-云计算:
车载电脑阶段:采用的是车载电脑和区域导向架构;
车-云计算阶段:车辆功能在云端。
计算集中化后的优势:
硬件架构升级:a.减少内部算力的冗余,避免ECU数量膨胀,减少设计算力总需求;b.传统分布式架构难以实现实时交互,集中式架构可以统一交互,并实现整车功能协同;c.集中式架构后,线束缩短,整车质量减轻。
软件架构升级:a.分布式架构软硬一体,整车企业并没有权限去维护和更新ECU,因此无法通过后续OTA更新解决问题。变成集中式架构后,软硬解耦,可以通过系统升级(OTA)持续地改进车辆功能,软件一定程度上实现了传统4S店的功能,可以持续地为提供车辆交付后的运营和服务;b.整体形成感知层后,采集的数据信息可共用。软硬解耦后,可实现多个应用共用一套硬件装置,有效减少硬件数量。
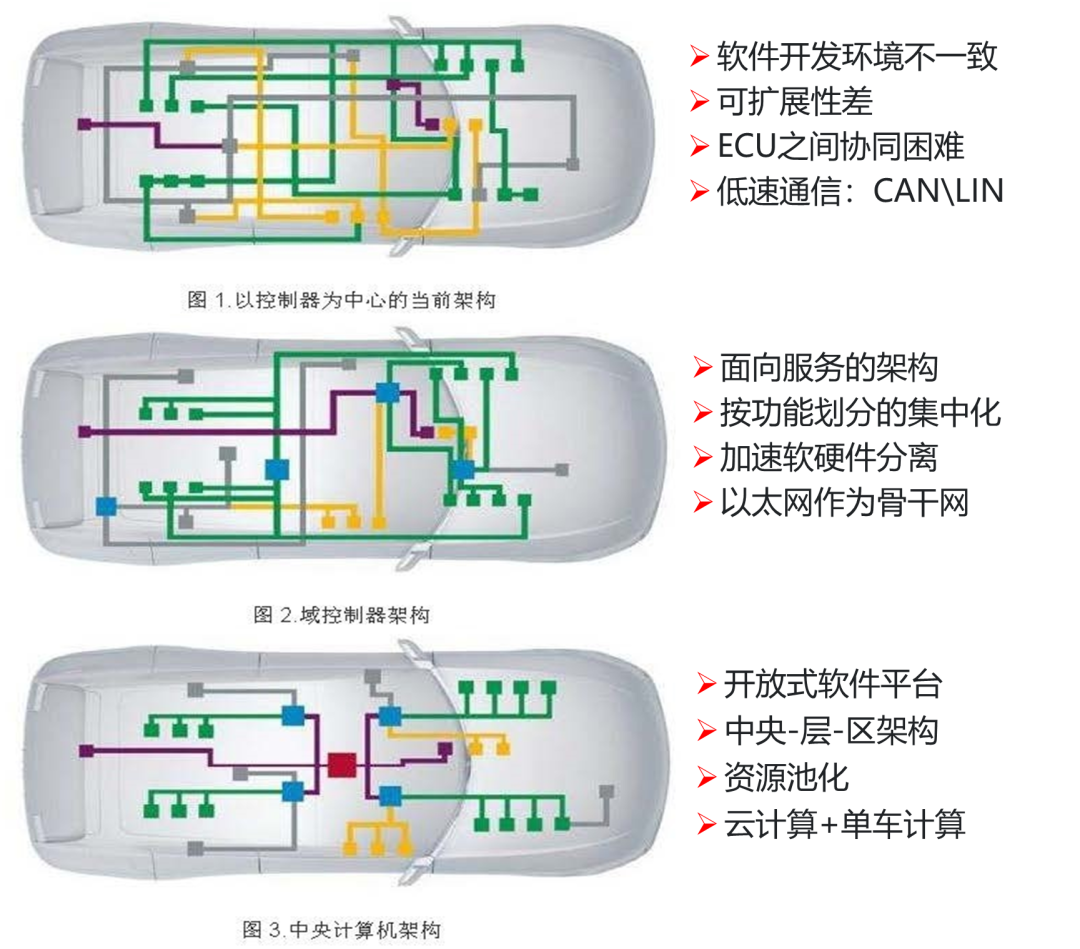
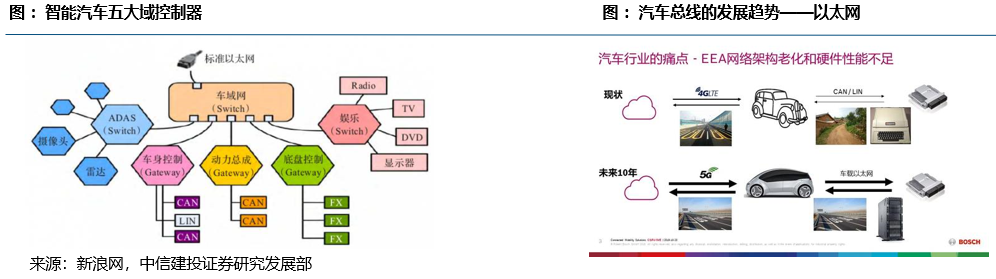
通信架构升级:采用高速以太网取代CAN总线,为未来汽车添加更多车联网、ADAS功能提供支撑。
目前车载总线通信正逐步由“CAN总线为主、其他总线为辅”的分布式架构,向“以太网为主、 CAN及其他总线为辅” 的域集中式架构转变。
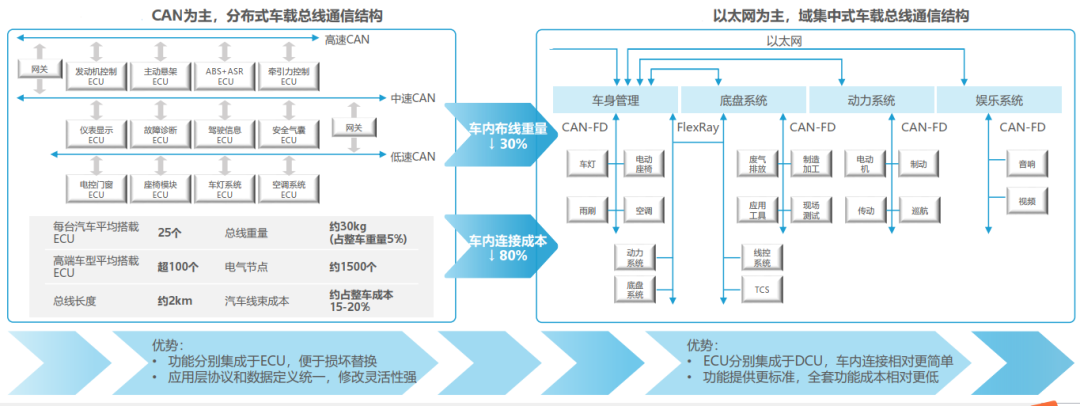
CAN总线为主的分布式总线架构中,功能分别集成,相较原先的点对点通信,功能集成度更高,更便于损坏后的修理与替换,且应用层协议与数据定义统一,修改灵活性强。但分布式架构仍然存在ECU数量多、电气节点多、线束长且重以及随之而来的线束成本高等诸多问题。
以太网为主的域集中式总线架构中,以太网作为汽车骨干网,其余通信分别结合不同通信技术的功能特点使用CAN-FD、 FlexRay等总线技术。当下的车内总线通信基本形态为“多技术共存,网关集中控制”,可以更有效地降低车内线束重量以及相应的连接成本和人力成本,整体设计更有利于标准化上车,同时全套配备的成本相比分布式架构更低。
二、 汽车智能功能及所需车载通信技术
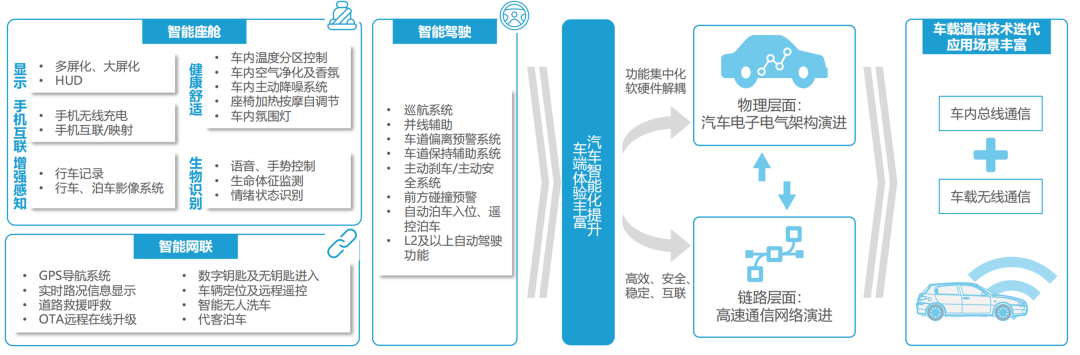
随着汽车智能化程度提升,智能座舱、智能网联、智能驾驶等方面功能体验日益丰富,用户体验与技术迭代相互牵引,推动智能电动汽车在物理层面和链路层面发生进一步的技术演进。物理层面,汽车电子电气架构不断向更轻量化方向发展,以适应汽车软硬件解耦及功能按域集中的发展趋势;链路层面,高速通信网络向着更高效、更安全、更稳定、互联设备更多的方向演进,为车端应用发展提供更可靠的技术支撑。
随着物理层面与链路层面的技术整体提升,智能电动汽车所需的车载通信技术也进一步迭代,车内总线通信与车载无线通信均有提升,智能电动汽车成为万物互联新的接入点,也成为移动的数据库。
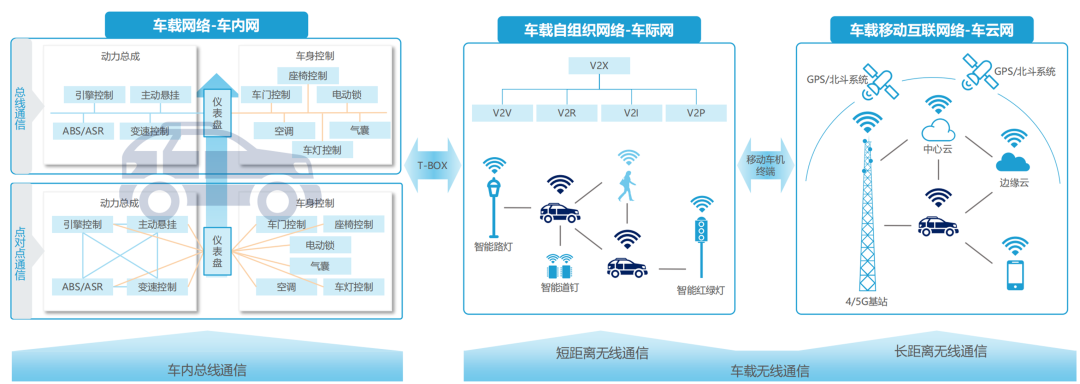
车载通信技术以有线和无线可以划分为车内总线通信和车载无线通信两部分,其中:
车内总线通信:以汽车线束为载体,以不同形式、不同速率连接车内各域控制器、网关、MCU,构成车载网络,即车内网。
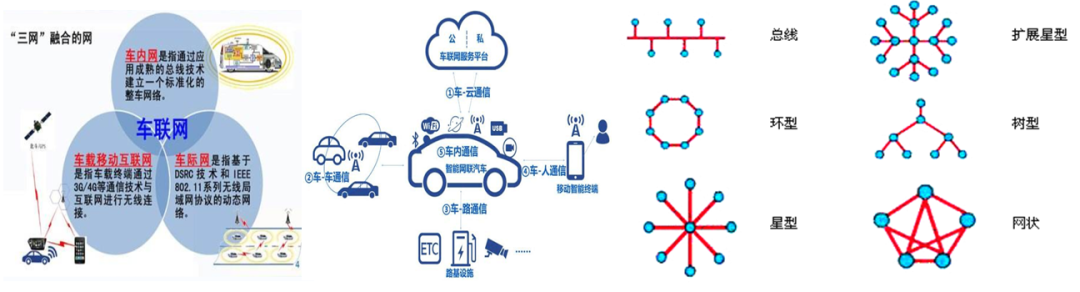
车载无线通信:可按照通信距离划分为短距离无线通信与长距离无线通信。其中,短距离无线通信传输距离一般不超过一公里,具有低成本、低功耗、对等通信等特征,以不同形式实现遥控、互联、识别等功能,最终实现车机与路端、交通弱势参与方之间的互联,形成车载自组织网络,即车际网。长距离无线通信技术由移动通信技术、微波通信技术和卫星通信技术组成,目前移动通信技术以4G为主,逐步向5G发展,车机与信号基站、云服务、移动设备终端以及卫星定位系统共同构成车载移动互联网络,即车云网。
汽车车载网络的拓扑结构常规为总线、星形、环形三种。
2.1 车载总线通信技术
车载总线通信的演进基于汽车电动化程度的提高,连接范围由基本控制系统到主要控制系统,再到如今各电子控制系统间的连接。目前智能电动汽车上搭载了多个ECU,分别控制不同功能模块,各模块与总线直接或组合后间接连接。
总线通信技术包括CAN、 CAN-FD、 LIN、 MOST、 FlexRay、车载以太网等。不同通信技术在速率、成本、扩展性、抗干扰性等方面各有所长,从而综合应用于不同车身应用中。CAN总线目前用于空调、显示、故障诊断等领域,将向更多骨干网络延伸。LIN总线多用于灯光、座椅等传输相对稳定且速率要求不高的位置中。车载以太网以轻质量、高速率、强兼容性等优势,目前应用于摄像头、激光雷达等关键部件的连接,受限于价格,中高端车型将首先实现车载以太网的大规模上车应用。
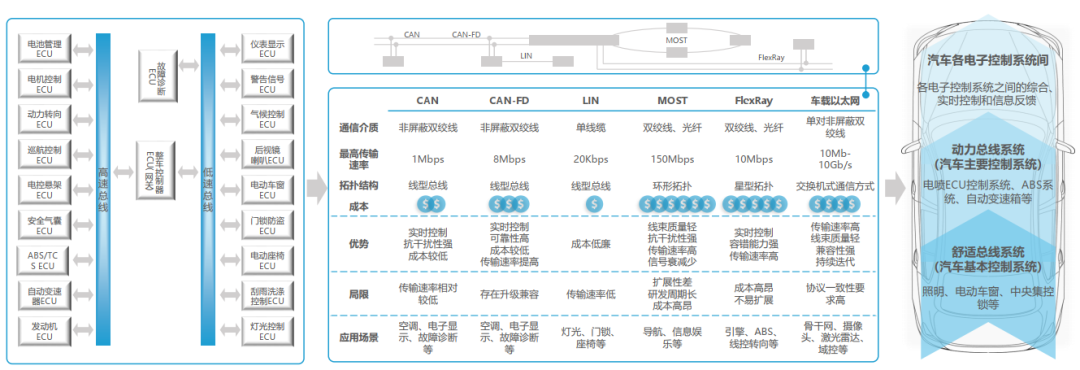
车载总线通信基本架构、技术对比及演进历程
2.2 车载无线通信技术
车载无线通信技术中, 短距离无线通信传输速率更快,多用于车内设备与车身附近场域的数据传输和连接,如车身定位、解闭锁等;实际应用范围多有交叉, Tier1和主机厂也更多倾向于适度冗余配置,以保证更稳定的体验。长距离无线通信一般指移动通信网络,以4/5G为代表,主要提供通信、导航等功能,服务智驾智舱功能。
不同的通信技术所覆盖的范围与能力稍有交叉,在实际车端应用中也并非“井水不犯河水”,比如车端T-BOX配备有多种通信能力,用户感知到的车身功能体验实际上是多种通信能力共同配合完成的结果。亿欧智库认为,当前仍处于“技术引领需求”的阶段,新技术的出现并不会一蹴而就地取代传统技术,而是在多种技术共存的同时,由新技术激发出更具创造性的功能体验。
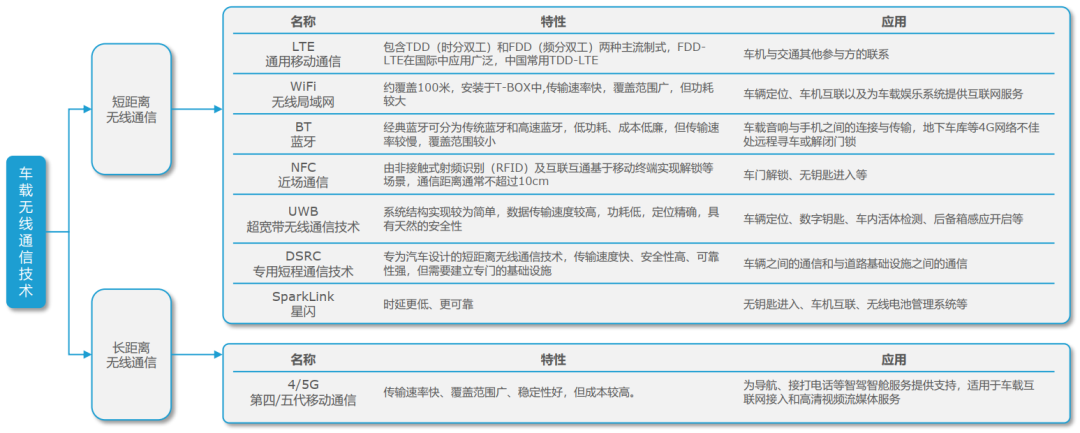
车载无线通信技术特征及应用
三、车载通信发展趋势
车载通信技术基于技术特征、参与方的不同,具有不同的发展路径。未来三年,主流车载通信技术将分别趋向于个性化、标准化不同方向发展,整体由技术硬件向服务平台发展,以一套硬件支撑更多服务体验。
车载以太网将在以太网芯片、线束等发展下趋向于形成更加标准化的车载通信架构;星闪技术以华为牵头的星闪联盟为始,集聚行业力量,未来有望量产上车后助力更多信息交互功能实现;C-V2X同样需要各方协同、行业联盟共同推进,随着高阶辅助驾驶等功能的演进, C-V2X有望形成智能驾驶标配功能,联合道路、城市形成更高层级的智慧交通;UWB目前仍处于发展爬坡期,基于高复用性,未来车端功能丰富、技术成本下降后有望更大范围搭载,支撑车内及车外近场通信更多服务。
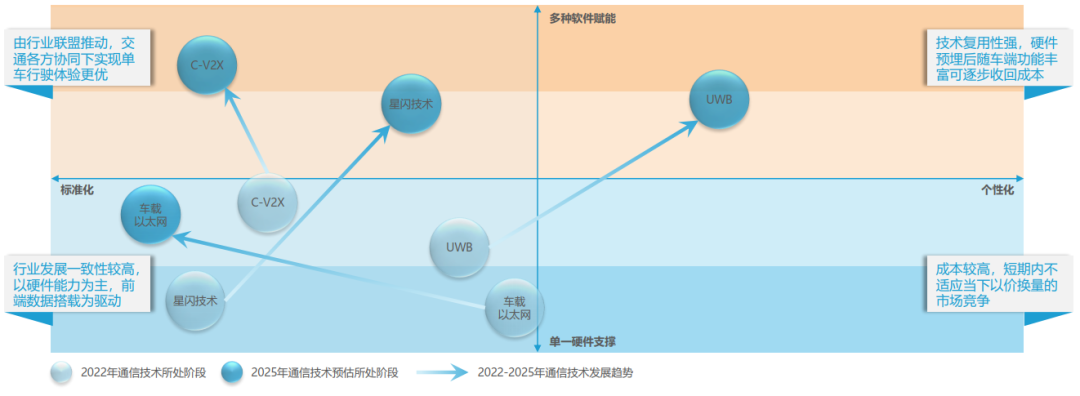
2025年主流车载通信技术发展趋势
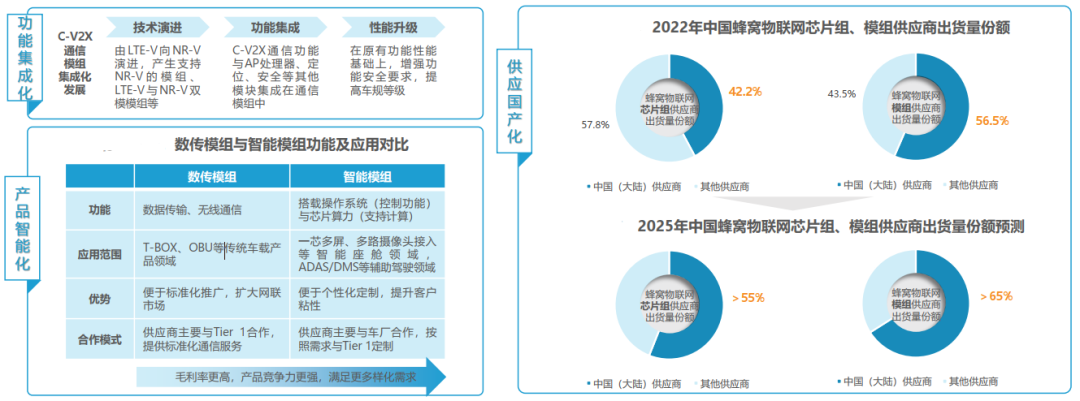
车载通信产业既是智能电动汽车整体发展的支柱性产业,又是连接车身内外各环节的纽带性产业,亿欧智库认为,未来车载通信产业将向功能集成化、 产品智能化、 供应国产化的趋势发展。
以车载通信产业的关键实现部件——通信模组为例, C-V2X通信模组经历技术演进、功能集成、性能升级,迭代出更加多元的产品形态。传统数传模组将进一步向智能模组演进,在车端功能进化、量产成本降低的推动下,智能网联将在标准化推广与个性化定制间双线波动发展,进而衍生出更多产业合作形态。依托中国市场的成本优势、工程师红利以及巨大的市场潜力, 中国蜂窝物联网芯片组及模组供应商正强势崛起,逐步占据更大的全球市场份额。
编辑:黄飞
-
车载以太网技术的深度解析与核心应用2025-09-03 6628
-
I2C通信设计深度解析2012-08-12 11535
-
六大汽车安全技术全解析2012-08-20 7702
-
连接车载应用与系统,深度解析汽车接口技术2014-08-07 5210
-
车载显示技术方案专题2014-09-15 3004
-
车载显示技术及其应用方案~2014-12-15 7130
-
汽车车载天线整车测试方案2017-01-13 5916
-
浅析车载应急通信技术2019-07-10 4597
-
如何利用车载以太网实现以太网与汽车的深度拥抱?2019-09-11 6264
-
介绍车载通信技术的现状与今后发展动向2021-05-14 2038
-
汽车电子技术的新应用——车载移动通信电话系统的实现2009-09-04 610
-
深度解读智能汽车车载传感器标定技术2023-06-02 3994
-
车载网关通信能力解析——SV900-5G车载网关推荐2023-10-20 1806
-
一文读懂 | 新能源汽车车载电源深度解析2024-05-16 6828
-
解锁未来汽车电子技术:软件定义车辆与区域架构深度解析2025-04-27 1802
全部0条评论

快来发表一下你的评论吧 !
