

力控机器人导纳控制框架
描述
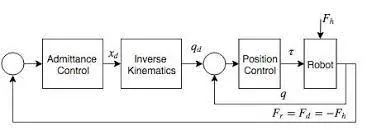
导纳控制框架:
力/力矩传感器:用于测量机器人与环境之间的力和力矩。
导纳控制器:根据传感器测量值和期望的力/力矩指令,生成控制指令以实现期望的导纳互动。
运动控制器:用于控制机器人的关节或末端执行器,以实现所需的运动轨迹。
环境建模与识别:用于对环境进行感知和识别,以帮助机器人适应环境变化。
性能分析:
•导纳响应性能:评估导纳控制器对外部力变化的响应速度和稳定性。
•导纳参数分析:分析导纳控制器中的参数对系统性能的影响,如导纳刚度和导纳阻尼等参数。
•导纳稳定性分析:评估导纳控制系统的稳定性,包括导纳稳定性边界和导纳参数的稳定性范围。
•动态性能分析:分析导纳控制器对不同频率的外部力变化的动态响应性能。
单自由度机械臂导纳控制实现的MATLAB程序:
% 定义导纳控制参数
Md = 5;
Bd = 10;
Kd = 20;
% 定义机械臂质量和初始位置
m = 1;
x = 0;
xdot = 0;
% 定义期望位置和速度
xd = 1;
xdot_d = 0;
% 定义时间步长和仿真时间
dt = 0.01;
T = 5;
% 初始化位置数组
x_arr = zeros(1, T/dt);
% 进行导纳控制仿真
for i = 1:T/dt
% 计算外部力
F_ext = 10 * sin(i*dt);
% 计算期望加速度
xddot_d = (F_ext - Bd*(xdot-xdot_d) - Kd*(x-xd)) / Md;
% 计算控制力
F = m * xddot_d - Bd * xdot - Kd * x;
% 更新位置和速度
xdot = xdot + (F + F_ext) / m * dt;
x = x + xdot * dt;
% 存储位置
x_arr(i) = x;
end
% 绘制位置图像
t = 0:dt:T-dt;
plot(t, x_arr)
title('Position')
仿真结果如下:

通过对力控机器人交互控制框架的性能分析,可以评估和优化系统的稳定性、精度、响应性能和适应性,以实现与外部环境或操作者的高效、安全和可靠的力互动。
阻抗控制与导纳控制框图分别如图(a)与(b)所示:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?2026-04-29 314
-
基于导纳控制的机器人拖动示教原理和实现步骤2023-12-04 8806
-
什么是力控机器人 优点有哪些2023-11-14 2688
-
力控机器人的控制框架和性能评估2023-11-09 1633
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2628
-
机器人是什么?2022-03-31 22326
-
什么是机器人控制系统2021-10-11 3685
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4144
-
先进机器人控制2017-09-19 4621
-
六轴工业机器人控制方式2017-08-09 6185
-
辰汉-如何实现服务机器人的运算与控制2017-06-09 3006
-
什么是工业机器人2015-01-19 6815
全部0条评论

快来发表一下你的评论吧 !
