

使用HAL库进行电机测速滤波
描述
如果将测得的速度值用VOFA+上位机画出来,我们可能会看到这样的曲线
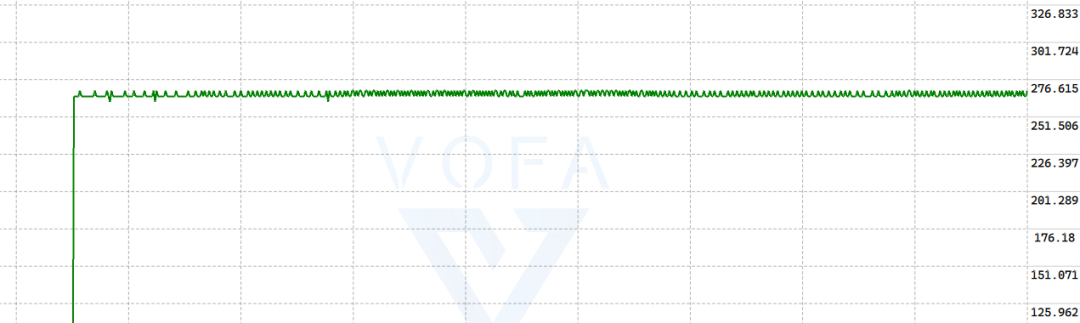
从图中我们可以看到,速度值在目标速度附近来回小幅度震荡,始终不稳定。这是因为编码器测速得到的速度值是离散的,如果电机的速度值刚好卡在两个离散值中间,我们测得的速度值就会在这两个离散值中间来回震荡。如果我们想要解决这个问题,最好先对测速的精度进行分析。
对于M法测速来说,测速的公式如下,其中,k是将速度换算成rpm的比例系数

由于除号后面的都是定值,所以我们只要分析每次采样的脉冲数对速度的影响即可。
我们假设现在测速频率是50Hz,减速比为30,编码器线数为13,那么脉冲数每变化1,速度的变化为

所以我们测得的速度只能是1.923rpm的整数倍。如果想要提高精度,在电机不变的情况下,我们可以使用500线的GMR编码器或者降低测速频率。
在VOFA+中,我们可以测得震荡时波峰和波谷的差值为1.92左右,和我们的计算相符。
为了改善这一现象,我们可以对速度采样值使用平均滤波,即将最近几次的速度采样值存放到数组中,每测得一个新的速度,就将新速度存入数组,将最早测得的速度值从数组中删除,我们使用的速度值是数组中所有速度的平均值。实现代码如下
#define SPEED_RECORD_NUM 20 // 经测试,50Hz个采样值进行滤波的效果比较好
float speed_Record[SPEED_RECORD_NUM]={0};
/*
* 进行速度的平均滤波
* 输入新采样到的速度,存放速度的数组,
* 返回滤波后的速度
*/
float Speed_Low_Filter(float new_Spe,float *speed_Record)
{
float sum = 0.0f;
test_Speed = new_Spe;
for(uint8_t i=SPEED_RECORD_NUM-1;i >0;i--)//将现有数据后移一位
{
speed_Record[i] = speed_Record[i-1];
sum += speed_Record[i-1];
}
speed_Record[0] = new_Spe;//第一位是新的数据
sum += new_Spe;
test_Speed = sum/SPEED_RECORD_NUM;
return sum/SPEED_RECORD_NUM;//返回均值
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//定时器回调函数,用于计算速度
{
if(htim- >Instance==GAP_TIM.Instance)//间隔定时器中断,是时候计算速度了
{
motor1.direct = __HAL_TIM_IS_TIM_COUNTING_DOWN(&ENCODER_TIM);//如果向上计数(正转),返回值为0,否则返回值为1
motor1.totalCount = COUNTERNUM_1 + motor1.overflowNum * RELOADVALUE_1;//一个周期内的总计数值等于目前计数值加上溢出的计数值
if(motor1.lastCount - motor1.totalCount > 19000) // 在计数值溢出时进行防溢出处理
{
motor1.overflowNum++;
motor1.totalCount = COUNTERNUM_1 + motor1.overflowNum * RELOADVALUE_1;//一个周期内的总计数值等于目前计数值加上溢出的计数值
}
else if(motor1.totalCount - motor1.lastCount > 19000) // 在计数值溢出时进行防溢出处理
{
motor1.overflowNum--;
motor1.totalCount = COUNTERNUM_1 + motor1.overflowNum * RELOADVALUE_1;//一个周期内的总计数值等于目前计数值加上溢出的计数值
}
motor1.speed = (float)(motor1.totalCount - motor1.lastCount) / (4 * MOTOR_SPEED_RERATIO * PULSE_PRE_ROUND) * 3000;//算得每秒多少转,除以4是因为4倍频
/*******************在这里添加滤波函数************************/
motor1.speed = Speed_Low_Filter(motor1.speed,speed_Record);
/**********************************************************/
motor1.lastCount = motor1.totalCount; //记录这一次的计数值
}
经过滤波后的速度曲线如下。
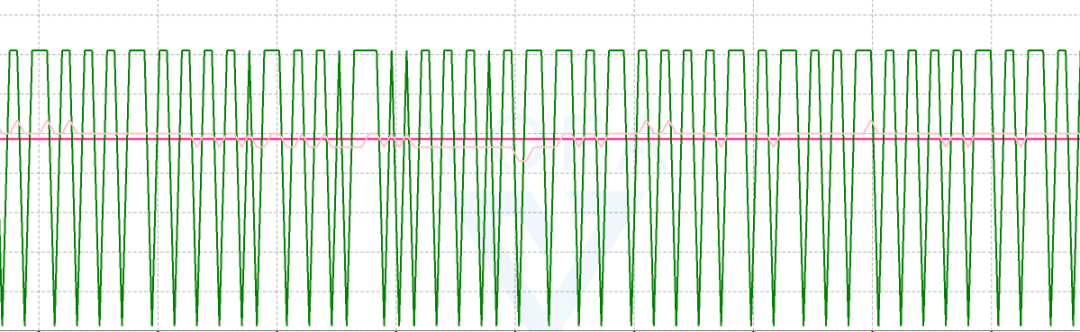
绿线是原始速度,红线是目标速度,粉线是滤波后的速度。可以看到,滤波后的速度值明显要平滑很多,这对我们后期的PID调试是很有利的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
使用STM32 HAL库进行GPIO控制的实例2023-12-21 6875
-
【HAL库每天一例】第113例:单轴25GA370直流电机编码测速(L298N驱动)2016-09-05 8339
-
STM32标准库改为HAL库的程序实现2017-11-22 36432
-
测速发电机的使用范围 测速电机的特点2021-07-20 6623
-
仿标准库,对HAL库的补充代码2021-11-29 1256
-
HAL库结构2021-12-09 858
-
【HAL库】串口通信2021-12-16 847
-
stm32F103 基于HAL库的直流电机驱动(一)2022-01-12 1657
-
【STM32】HAL库 PWM控制电机转速与编码器读取(超详解)2022-01-14 3796
-
stm32 hal库资料分享2022-11-03 2056
-
测速电机是什么?2023-06-14 2012
-
测速电机的分类与测速电机的应用2023-07-19 1780
-
STM32 HAL库的功能和使用方法 STM32 HAL库和标准库的区别2023-08-08 7870
-
STM32 HAL库串口收发是如何使用的?2023-10-26 3386
-
如何快速入门HAL库编程 HAL库与裸机编程的比较2024-12-02 2392
全部0条评论

快来发表一下你的评论吧 !
