

机器人梯形加减速轨迹时间缩放
描述
基于上面的原理,不管是q(t)是何种加减速算法生成,都可以使用上面的时间缩放法进行时间同步,下面以梯形减速为例进行说明,流程如下图所示。
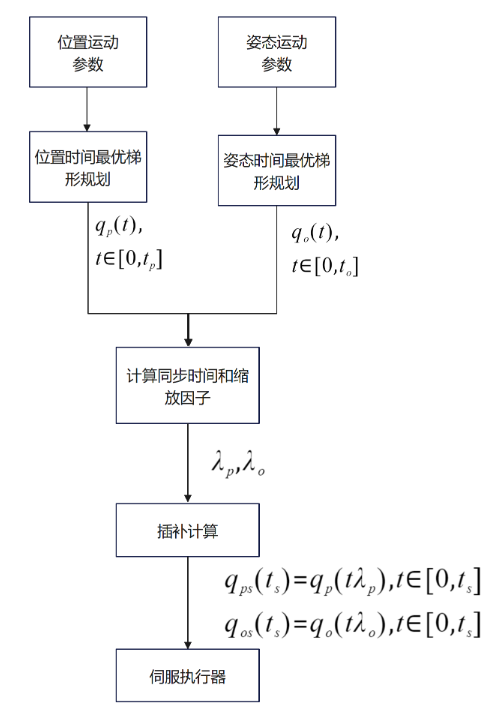

从流程图中可以看出,只需在插补环节对时间较小的轨迹进行时间缩放即可,整个流程计算量很少。
下面给出不同参数下的几个算例,实现代码在本文末尾。
算例1
有匀速段,位置与姿态位移量相差不大。
%位置梯形参数
vs=10;%起步速度
vmax=50;%最大速度
ve=20;%末速度
amax=500;%加速度
dmax=400;%减速度
L=10;%位移
Ts=0.001;%插补周期
%姿态参数
vs=5;
vmax=40;
ve=15;
amax=300;
dmax=200;
L=8;
Ts=0.001;

算例2
位置与姿态位移量相差不大,均没有匀速段。
%位置梯形参数
vs=10;%起步速度
vmax=50;%最大速度
ve=20;%末速度
amax=500;%加速度
dmax=400;%减速度
L=5;%位移
Ts=0.001;%插补周期
%姿态参数
vs=5;
vmax=40;
ve=15;
amax=300;
dmax=200;
L=2;
Ts=0.001;

算例3
位置与姿态位移量相差很大,位移是姿态的10倍,位移有匀速段,姿态没有匀速段。
%位置梯形参数
vs=10;%起步速度
vmax=50;%最大速度
ve=20;%末速度
amax=500;%加速度
dmax=400;%减速度
L=20;%位移
Ts=0.001;%插补周期
%姿态参数
vs=5;
vmax=40;
ve=15;
amax=300;
dmax=200;
L=2;
Ts=0.001;

算例4
位置位移量大于0,姿态位移量为0,同步前姿态运行时间就是0,所以其轨迹就是一个点,在左图中看不到。时间同步后,姿态运行时间是与位置相同,只是速度和加速度始终是0。
%位置梯形参数
vs=10;%起步速度
vmax=50;%最大速度
ve=20;%末速度
amax=500;%加速度
dmax=400;%减速度
L=20;%位移
Ts=0.001;%插补周期
%姿态参数
vs=5;
vmax=40;
ve=15;
amax=300;
dmax=200;
L=0;
Ts=0.001;

算例5
连续两段轨迹,同步前衔接速度是相等没有跳变的。同步后衔接速度发生了跳变,不连续。这是因为两段轨迹的缩放因子λ不相等
导致衔接处速度发生了跳变,这是时间缩放法的缺点,因此,时间缩放法不适用于衔接速度非零的连续轨迹时间同步。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人时间缩放法原理2023-11-10 1584
-
步进电机驱动算法之梯形加减速算法2023-03-17 1415
-
梯形加减速的相关资料推荐2022-01-24 1696
-
梯形加减速算法实现2022-01-11 1985
-
如何去实现一种梯形加减速速度曲线呢2021-12-21 2464
-
加减速控制曲线直线(梯形)2021-09-03 1867
-
F407步进电机梯形加减速算法是如何实现的?2021-07-08 1292
-
加减速算法主要分为哪几种?2021-07-07 1177
-
arduino、单片机控制步进电机,梯形加减速2018-11-08 6998
-
【机器人在线】喷涂机器人轨迹偏差优化的发展现状2017-07-12 3534
-
数控连续区域短轨迹代码加减速处理算法研究2016-05-03 707
全部0条评论

快来发表一下你的评论吧 !
