

基于自行车模型的路径跟踪控制算法
描述
2.1 基于自行车模型的路径跟踪控制算法
2.1.1 纯跟踪控制(Pure Pursuit)算法
纯追踪控制是最早提出的路径跟踪策略之一。由于其易于实现和令人满意的性能,已被证明是车辆控制不可或缺的工具。
在DARPA挑战赛中,有多个团队采用了纯追踪的控制算法[3]。
从自行车模型出发,纯跟踪算法以车后轴为切点, 车辆纵向车身为切线, 通过控制前轮转角,使车辆可以沿着一条经过目标路点(goal
point)的圆弧行驶,如图2-1所示。
通过正弦定理求出曲率、偏转角与车轴之间的关系:
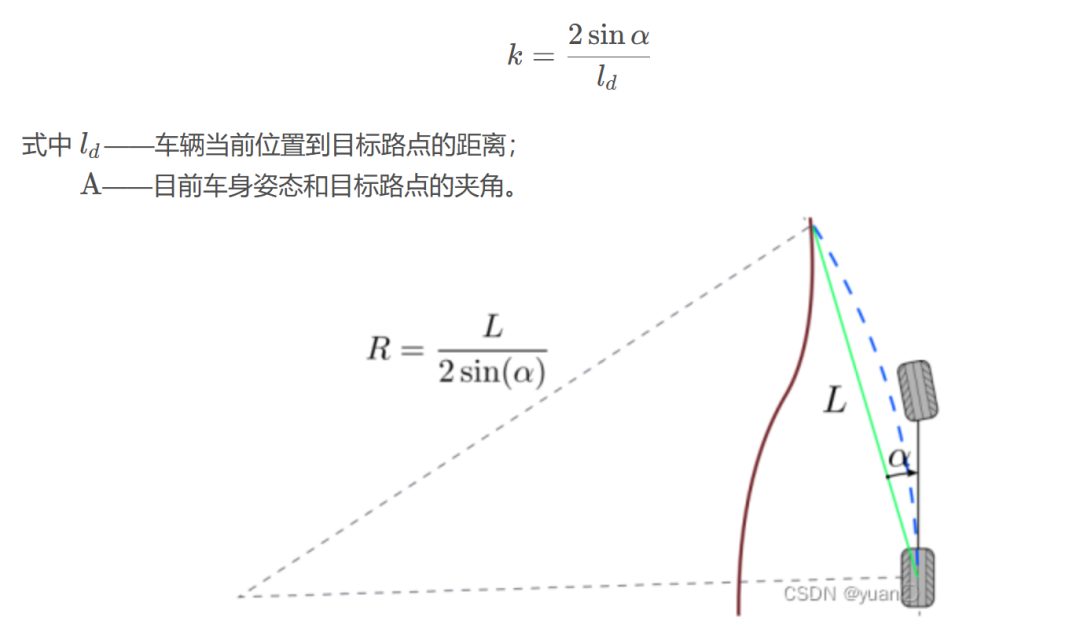
图2-1 纯追踪控制示意图


通常来说,会使用最大、最小前视距离来约束前视距离,越大的前视距离意味着轨迹的追踪越平滑,小的前视距离会使得追踪更加精确(当然也会带来控制的震荡),如图2-2
所示。
驾驶员在实际驾驶过程中会观察车辆前方一定距离范围内的道路信息,以获得一定的预见性,提前对车辆进行调整,从而取得良好的控制效果。
在路径跟踪过程中,前视距离与车速的大小有直接的关系。当车速较高时,需要较大的前视距离;当车速较低时,较小的前视距离可以达到很好的跟踪精度。

图2-2 前视距离对控制的影响
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自行车平衡DIY:自行车平衡控制原理2023-06-25 2622
-
使用粒子光子跟踪自行车运动2022-11-03 910
-
如何为自行车制作车速表/跟踪器2022-10-28 1417
-
电动自行车充电桩介绍2022-08-11 2007
-
如何打造自动驾驶「自行车」的呢2021-08-26 2376
-
纯追踪算法自行车模型2021-08-17 1255
-
电动自行车在线防盗装置2019-01-20 5480
-
DIY:《极品飞车》——自行车控制器2017-01-12 1023
-
电动自行车控制器的技术原理解析2010-12-15 3911
-
APPLICATIONS电动自行车2010-08-04 961
-
电动自行车解决方案2010-03-22 1265
-
电动自行车控制器电路原理分析2009-12-24 15422
-
电动自行车电池系统介绍2009-12-01 1478
-
电动自行车脉冲调速装置电路图2009-07-29 2437
全部0条评论

快来发表一下你的评论吧 !
