

mpc控制是什么 mpc介绍
描述
MPC控制
模型预测控制(Model predictive control,MPC)从上世纪70年代问世以来,已经从最初在工业过程中应用的启发式控制算法发展成为一个具有丰富理论和实践内容的新的学科分支。
预测控制针对的是有优化需求的控制问题,30多年来预测控制在复杂工业过程中所取得的成功,已充分显现出其处理复杂约束优化控制问题的巨大潜力。
MPC控制是一种实时的闭环优化控制方法,该算法的优点主要是反复在线进行,能够不断获取当前最优控制量,且可以通过建立目标函数来满足车辆执行机构、侧滑和动力学等多约束条件。
但其跟踪性能对预测模型的精度很敏感,且由于非线性模型预测控制对计算性能的高要求,使其不适合高速驾驶环境。
目前许多研究者都将非线性车辆模型进行了线性化处理,但其只能保证控制器在车辆和轮胎的线性区域的跟踪精度。
MPC控制器也叫做滚动时域控制器,该控制器考虑控制系统的非线性动力学模型并预测未来一段时间内系统的输出行为,通过求解带约束的最优控制问题,使得系统在未来一段时间内的跟踪误差最小,这种方法鲁棒性较强。
模型预测控制算法具备预测模型、滚动优化和反馈校正基本特征。传统的研究方法往往忽略或者简化了运动学约束以及动力学约束,而这类约束对于控制性能有着显著影响。
模型预测控制方法能够通过优化目标函数显式地将车辆运动学和动力学约束纳入考虑。
使用MPC的滚动优化和反馈校正特性,能够有效降低甚至消除闭环系统时滯问题所带来的影响,并能够结合规划所给出的未来轨迹信息对运动控制进行优化,提升控制性能。
Wang Weiran等人设计了一种基于拉盖尔函数的自适应预测控制方法。
该方法包括两部分:一是用于精确跟踪轨迹的自适应MPC模块;另一种是拉盖尔函数模块,用于显著减少计算。
在自适应MPC模块中,引入递归最小二乘算法对系统的模型参数进行识别,以提高系统的精度和鲁棒性。然而,当AUV在复杂的环境中工作时,这种方法可能会导致计算量的大量增加。
因此,在拉盖尔函数中,引入控制器输入变量的重构来降低目标函数的矩阵阶。结果表明,该方法在计算量较少的AUV跟踪轨迹时,在动态、抗干扰和鲁棒性等方面都具有良好的性能。
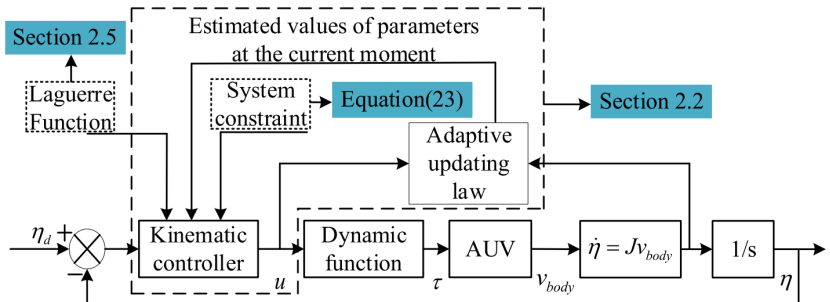
图2-6 自适应MPC方框图
Paden对纯追踪算法、前轮反馈控制、后轮反馈控制、基于Lyapunov函数的控制、输出反馈线性化控制以及MOC控制从稳定性、时间复杂度、使用模型以及假设使用前提作出了总结,如表2-2所示。
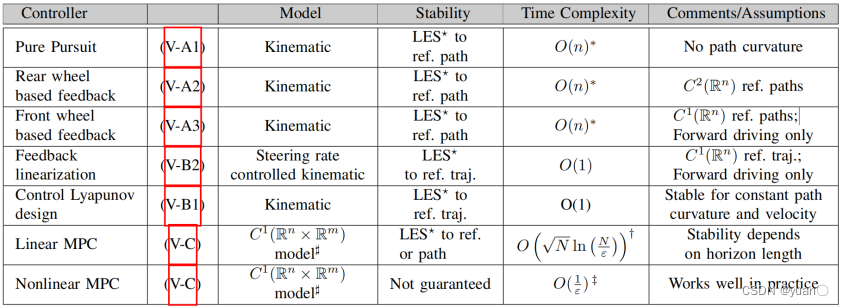
表2-2 多种控制器的总结 Legend* : 局部指数稳定性(local exponential stability ,LES)
-
MPC5534微控制器:技术解析与应用指南2026-04-10 350
-
mpc535/mpc536产品简介2017-09-19 1043
-
mpc003 mpc004 mpc006 mpc004s运动控制2016-03-15 1474
-
基于MPC8280多通道控制器驱动的研究2011-09-16 2367
-
MPC506,MPC507,pdf(Single-Ended2010-08-22 986
-
MPC2810运动控制器用户手册2009-08-01 1262
-
MPC875/MPC870,pdf,datasheet2009-05-29 1170
-
MPC8240与MPC106的性能比较2009-04-01 826
-
MPC508A/MPC508A/MPC509A pdf da2008-12-18 1350
全部0条评论

快来发表一下你的评论吧 !
