

无人机飞控系统组成及工作原理
军用/航空电子
描述
无人机最核心的技术集中在总体技术、动力系统和飞控技术三个方面,共同决定了无人机系统的飞行高度、航程、航时、航速、载重等等一些重要的技术指标。在无人机中,飞控系统的作用是控制无人机运行的姿态和高度,决定着无人机飞行时的航迹和路线,它是无人机完成各种任务的关键。一套完整的无人机飞行控制系统由飞行控制计算机、姿态传感器、无线电高度计等组成,其核心是飞行器控制算法。
那么,无人机的飞控系统,又由哪几部分组成呢?
飞行控制系统简称飞控系统,是控制无人机飞行姿态和运动方向的部件,是无人机完成起飞、空中飞行、执行任务、返场回收等整个飞行过程的核心系统,也称为自动驾驶仪,这也是无人机区别于航模的根本原因之一。实际上,无人机的飞控系统就相当于有人机的驾驶员,是无人机执行任务的关键。
一、组成部分
1、飞行控制器
作为无人机飞行运动控制的核心,它要完成飞行器姿态和位置两大类输入参数与输出参数之间的转换,同时还要满足各种外界干扰条件下对操纵指令响应速度以及飞机操纵稳定性等要求的系统集成。
2、姿态传感器
目前常用有惯性导航系统、气压导航系统和激光陀螺仪。为了提高飞机的操纵稳定性,通常采用陀螺和加速度计共同组成复合陀螺结构,保证了飞机姿态跟踪能力及在各种复杂姿态下飞机均能平稳地沿给定轨迹飞行。
3、高度计 高度计主要用于探测和计算无人机所处空中的高精度位置信息,通常采用三轴数字陀螺仪加三轴数字组合方式进行设计。
4、飞行器控制算法软件
飞控系统是一个相当复杂的非线性系统,其中涉及到大量对飞机控制算法优化和提高精度性能有重要影响的变量参数,如姿态角、速度等;还要考虑到外界环境扰动及各种干扰条件下对数据处理过程所产生负面影响。
5、实时控制器系统
无人机要实现精确悬停、定高返航是飞行控制系统功能之一,而这些功能实现都需要基于实时控制器算法软件。实时控制器可分为惯性实时控制器和视觉实时控制器两种,其中视觉RTK一般用于无人机导航任务;惯性实时控制器可应用于固定翼飞机、直升机等。
二、基本功能
1、控制 解决“怎么飞”的问题。根据任务,通过算法计算出控制量,输出给电调,进而控制电机转速,进而实现姿态控制,这是飞控系统要做的首要事情。 2、定位 解决“在哪儿”的问题。充分发挥飞控系统中各种传感器的功能,综合分析判断得到准确的位置和姿态信息。 3、导航 解决“去哪儿”的问题。飞行操控人员或者地面站操控无人机进行飞行,进而实现航迹控制。
三、详细结构分析
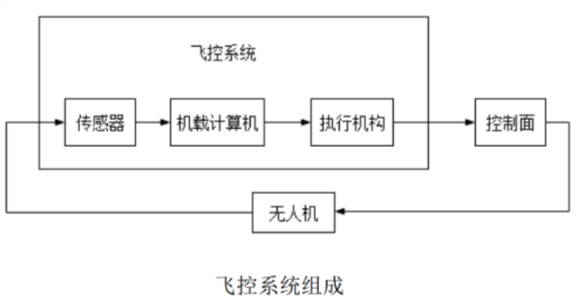
1、传感器

无人机飞控系统常用的传感器包括陀螺仪、加速度计、磁力计、气压计、超声波传感器及GPS模块等,这些传感器构成无人机飞控系统设计的基础。各传感器基本功能如下: 1、惯性测量单元(IMU),包括加速度计、陀螺仪和磁力计,主要得到无人机的姿态信息。常用的有6轴、9轴和10轴三种,6轴IMU包含三轴加速度计和三轴陀螺仪,9轴IMU是包含了三轴加速度计、三轴陀螺仪和三轴磁力计,而10轴IMU则是在9轴IMU基础上加上气压计构成。陀螺仪主要用于记录俯仰、横滚角度;加速度计主要记录加速度,是测量运载体线加速度的仪表;气压计主要用于记录海拔高度。
惯性测量单元(IMU) 2、高度测量单元,包括气压传感器(简称气压计)和超声传感器。气压计测量得到绝对高度信息,而超声传感器测量得到相对高度信息,可实现悬停高度控制或避障。
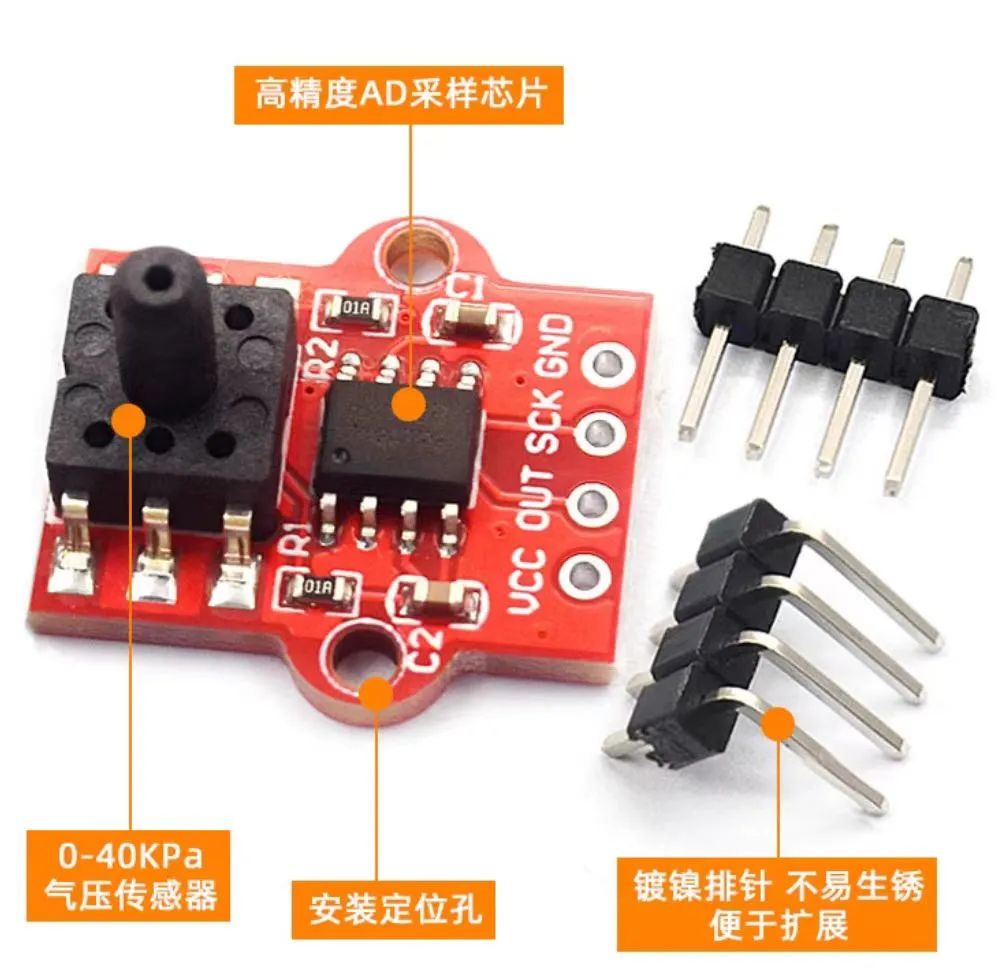
气压传感器

超声传感器 3、全球定位系统(GPS),包含GPS模块和指南针模块,用于精确确定飞行器的方向及经纬度。GPS主要是接收GPS卫星导航位置信息,用于无人机的定位。对于失控保护自动返航,精准定位悬停等功能的实现至关重要。
3、机载计算机 机载计算机是飞控系统的核心部件,是算法计算平台,由硬件和软件组成。 1、硬件,也就是电路板,由主处理控制器(常用的有通用型处理器MPU、微处理器MCU、数字信号处理器DSP及可编程门阵列FPGA)、二次电源(5V、±15V等直流电源)、模拟量输入/输出接口、离散量接口、通信接口(RS232/RS422/RS485、ARINC429和1553B总线)、余度管理(信息交换电路、同步指示电路、通道故障逻辑综合电路及故障切换电路)、加温电路、检测接口等组成。
机载计算机 2、软件,也就是飞控程序,是一种运行于计算机上的嵌入式实时任务软件,不仅要求功能正确、性能好、效率高,而且要求其具有较好的质量保证、可靠性和可维护性。主要模块有硬件接口驱动模块、传感器数据处理模块、飞行控制律模块、导航与制导律模块、飞行任务管理模块、任务设备管理模块、余度管理模块、数据传输和记录模块、自检测模块等。
四、常见的飞控系统及地面站
APM、PIXHAWK飞控,地面站为Mission Planner,飞控、地面站均开源。 NAZA飞控,无地面站,不开源。 N3飞控,无地面站,不开源。 A2飞控,配有大疆地面站,不开源。 A3飞控,配有大疆地面站,不开源。 LINGQUE灵鹊系列飞行控制系统,有地面站,不开源。
N3飞控依然采用了NAZA系列的IMU与主控一体的结构,主控上提供了丰富的扩展接口,几乎能与DJI目前所有主流的配件配合使用,对LB2、禅思云台、如影MX云台、DJI GO的支持一样不少。N3飞控本身就内置双IMU实现双冗余,在一套IMU传感器异常时可自动切换到备用IMU,可靠性大大增加。同时通过主控上的EXP接口可外接A3升级套件,可组成三IMU、双GPS的冗余系统,可靠性进一步增加,让N3也能轻松满足专业级应用。GNSS-Compass模块,内含GPS/GLONASS双模接收机和指南针。相比以前增加了CAN扩展接口,并增加了一个很小的LED状态指示灯,模块的工作状态一目了然。总体来说,N3不再像以前的NAZA系列给人一种低端的感觉,从工业设计、制造工艺、硬件配置和可拓展性各方面都飞跃了一个很大的台阶。
N3飞控依然与NAZA系列的产品一样采用了主控与IMU一体的结构。以前的NAZA系列,主控的安装方向必须与机头方向一致,这对飞控的安装和走线带来了很大的麻烦。N3的主控可以向前、向左、向右、向后进行安装,这一变化很值得赞赏,对安装和走线带来了很大的方便。 N3飞控在S800机架的大震动下,航线飞行完全没有掉高的现象,看来N3的内部减震的确做得很好,同样的使用情况WKM和A2都会出现不同程度的掉高。N3飞控在GPS模式下,最大倾角设置为35°,以稳定性和精准的操控为主,定点、定高都很给力,不论是慢速精确飞行、还是大机动航线飞行都提供了很满意的稳定性和操控手感。与NAZA V2相比,提升了不只是一点点。
编辑:黄飞
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 4728
-
多旋翼无人机飞控系统的设计资料分享2021-11-11 1305
-
无人机飞控系统的主要功能作用是什么?2021-11-08 5712
-
无人机飞控系统2021-07-21 2840
-
无人机的工作原理2021-01-13 5598
-
山东无人机反制设备保障信息不被泄漏2020-08-12 1115
-
无人机飞控系统的硬件是由哪些部分组成的2019-09-18 21801
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3865
-
无人机中的MCU是如何工作的?2018-10-09 2751
-
无人机系列之飞控系统2018-09-25 6651
-
无人机侦测和反制系统2017-04-05 8675
-
无人机飞控系统的原理、组成及作用详解2017-02-08 61531
-
无人机飞控系统组成及系统软件设计2016-07-08 17999
-
无人机飞手紧缺 看无人机行业发展趋势如何?2016-06-28 4238
全部0条评论

快来发表一下你的评论吧 !
