

智能车的运动控制系统介绍
描述
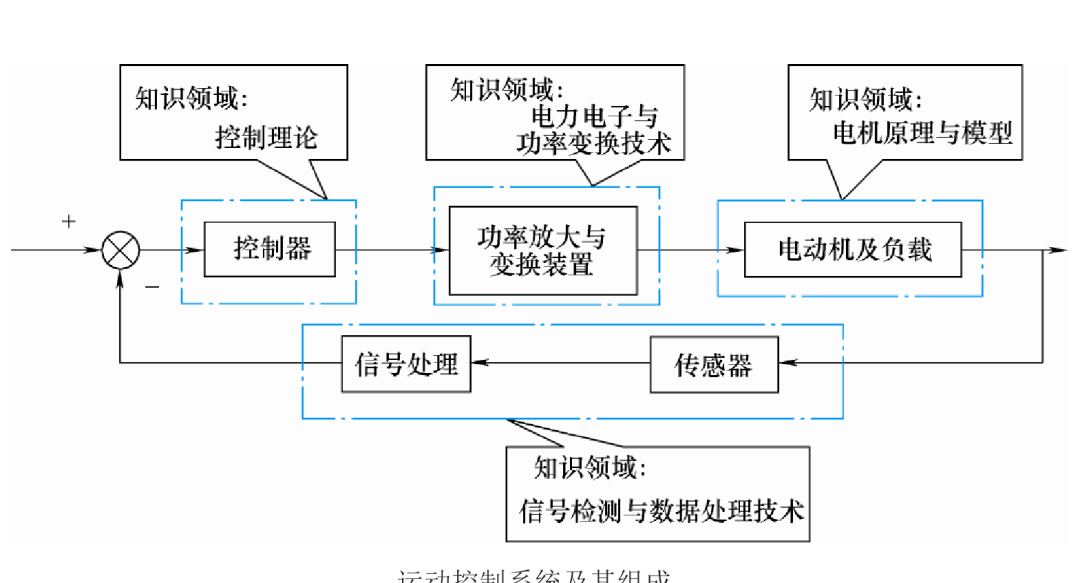
运动控制系统是通过控制电机电压、电流、频率等输入量,来满足工作机械的转矩、速度、位移等机械量,使各种工作机械按照人们期望的要求运行,以满足生产及应用的需要。
运动控制系统由电机、功率变换装置、控制器及相应的传感器构成,其框图及涉及学科领域如下图:
对照运动控制系统的结构框图,可以推断出智能车中的运动控制系统如下:
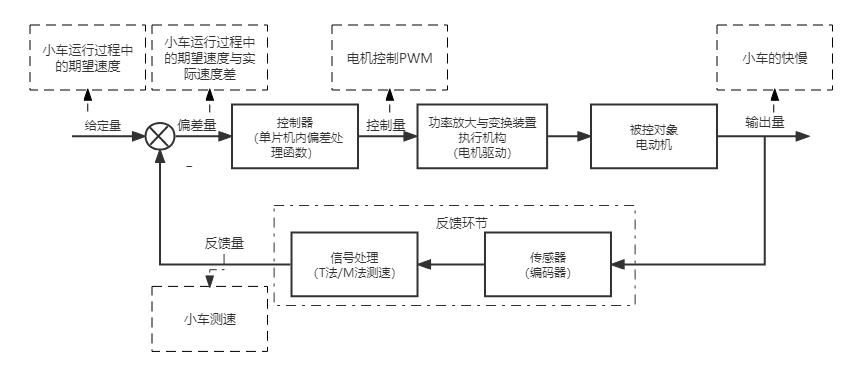
被控对象
电机是门深奥的学问号称自动化专业的天书之最(笔者当初被电机学折磨的有阴影,故有关电机不做分析)。
(此处所提到的电动机都是车模上指定的普通直流电机,不包括十七届中的无刷电机)智能车中的电机都是用于调速系统的拖动电机,而舵机则是用于伺服系统的伺服电动机的一种。
执行机构
功率放大与变换装置在智能车系统之中指的是电机驱动,能够根据主控输出的信号,动态的调节被控对象(直流电机)的驱动电压来控制电机的转速从而达到控制车身速度的作用。
控制器
智能车运动控制的控制器一般采用数字PI控制(关于PI控制器后面会出一篇PID的文章描述),大家姑且先把PI控制器当做一个公式,只用输入误差,输出的就是根据内部算法计算后的结果。这里借用龙邱科技的 代码片。
// An highlighted block
typedef struct
{
float kp; //P
float ki; //I
float kd; //D
float imax; //积分限幅
float out_p; //KP输出
float out_i; //KI输出
float out_d; //KD输出
float out; //pid输出
float integrator; //< 积分值
float last_error; //< 上次误差
float last_derivative;//< 上次误差与上上次误差之差
unsigned long last_t; //< 上次时间
}pid_param_t;
pid_param_t Speed_PID;
Speed_PID.kp = 130;
Speed_PID.ki = 2.5;
Speed_PID.kd = 0.25;
/*************************************************************************
* 函数名称:void Motor_Control(void)
* 功能说明:电机控制
* 参数说明:
* 函数返回:
* 修改时间:
* 备 注:这类设计PID运算的函数一定要放在定时器中断内保持控制周期稳定
*************************************************************************/
void Motor_Control(void)
{
MotorDuty1 = (int)PidIncCtrl(&Speed_PID, Target_Speed - ECPULSE1);
if(MotorDuty1 > 8000)MotorDuty1 = 8000;else if(MotorDuty1 < -8000)MotorDuty1 = -8000;
if(Speed_PID.out > 8000)Speed_PID.out = 8000;else if(Speed_PID.out < -8000)Speed_PID.out = -8000;
Motor1Ctrl(MotorDuty1);
// 电机闭环控制
}
/*************************************************************************
* 函数名称:float constrain_float(float amt, float low, float high)
* 功能说明:pid增量式控制器输出
* 参数说明:
* @param pid pid参数
* @param error pid输入误差
* 函数返回:PID输出结果 注意输出结果已经包涵了上次结果
* 修改时间:2020年4月1日
* 备 注:
*************************************************************************/
float PidIncCtrl(pid_param_t * pid, float error)
{
pid- >out_p = pid- >kp * (error - pid- >last_error);
pid- >out_i = pid- >ki * error;
pid- >out_d = pid- >kd * ((error - pid- >last_error) - pid- >last_derivative);
pid- >last_derivative = error - pid- >last_error;
pid- >last_error = error;
pid- >out += pid- >out_p + pid- >out_i + pid- >out_d;
return pid- >out;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
智能车浅谈——电机控制篇2023-05-05 697
-
基于机器视觉的智能车系统2022-10-12 2970
-
怎样去设计一种基于HC-SR04模块的智能车库控制系统2021-10-18 1996
-
基于NRF24L01的智能车控制系统设计2021-08-23 736
-
怎么实现基于9S12DG128的智能车控制系统设计?2021-05-18 1656
-
基于单片机和射频收发芯片实现智能车控制系统的设计2019-07-30 3771
-
如何设计一个具有路径记忆功能的智能车控制系统的资料概述2018-12-07 1584
-
智能车系统解决方案总体设计2018-10-24 2736
-
基于摄像头的智能车控制系统设计_高正中2017-01-12 882
-
智能车控制系统电路2015-11-03 620
-
菜鸟一枚 0基础做毕设 基于labview的智能车控制系统的设计2015-04-26 5492
-
基于电磁传感器路径识别的智能车控制系统2013-03-29 10315
-
飞思卡尔智能车控制系统设计2011-07-06 1231
-
智能车速度控制系统设计与实现2009-11-23 3772
全部0条评论

快来发表一下你的评论吧 !
