

智能车方向控制典型环节分析
描述
方向控制
典型环节对应

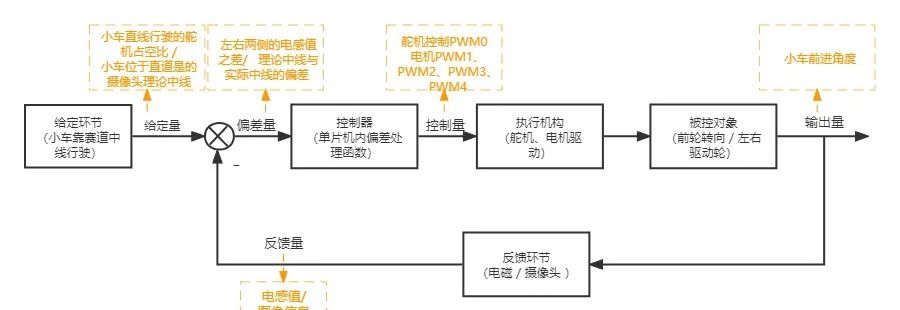
由于车模结构的不同,小车方向控制的各环节会有所区别,例如L车、B车的执行结构只有舵机;F车、E车的执行机构只有驱动轮;
而C车的执行机构既有舵机又有驱动轮。这里以C车为例,各自动控制系统环节与小车实际对应关系如下图所示:
典型环节分析
给定环节与给定量
给定环节可以理解为电磁模块和摄像头模块,给定量可以理解为小车位于直道行驶是的舵机控制占空比值或者摄像头的理论中线值。
比较环节与偏差量
比较环节在智能车系统中可以理解为单片机的偏差计算函数,偏差量就是该函数计算出的误差值。下面是电磁偏差计算代码片。
// 此代码一般放在定时其中断,保证偏差计算的时序稳定
//电感采集获取赛道信息,三电感 000 000 000 //
L=adc_once(ADC_P00, ADC_10BIT);//左电感值
M=adc_once(ADC_P01, ADC_10BIT);//中间电感值
R=adc_once(ADC_P05, ADC_10BIT);//右电感值
My_Direction.NowError=50*(R-L)/(L+M+R);//**差比和**计算偏差
//My_Direction.NowError就是偏差量
而摄像头的偏差量主要是通过计算前瞻的数值与理想中值的差值或者计算曲率来获取,这个部分打算后面专门出一篇描述摄像头的文章,在此不做详细描述。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
智能车浅谈——电机控制篇2023-05-05 665
-
电磁智能车原理2022-12-13 6250
-
智能车制作相关资料分享2022-01-17 1497
-
树莓派智能车AlphaBot系列教程2017-05-15 9112
-
PID的智能车控制算法研究2016-07-18 10027
-
labview智能车参考程序(fuzzy 控制)2016-02-05 14875
-
基于labview的智能车控制系统2015-04-26 5931
-
多功能智能车2013-10-20 6
-
触屏寻迹智能车使用“安芯一号”SLH89F51622013-10-15 2422
-
智能车设计基础2012-10-21 4796
-
智能车2012-08-31 2699
-
智能车电磁检测控制技术研究2011-03-18 1037
-
基于虚拟仪器技术的智能车仿真系统2011-03-07 4895
全部0条评论

快来发表一下你的评论吧 !
