

智能车方向控制舵机PWM技术
描述
舵机
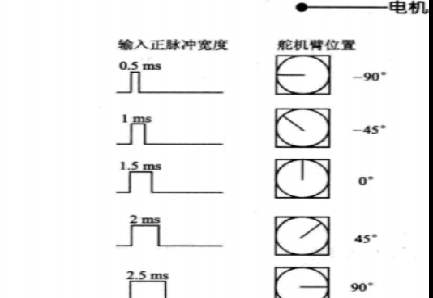
舵机是一种位置(角度)伺服的驱动器,我们可以通过给信号脚不同的占空比来让舵机进行打角进而控制小车方向。
例如C车的S3010舵机,它需要使用周期20ms(50Hz)的PWM驱动,高电平时间和舵机打角的对应关系如下:
PWM技术
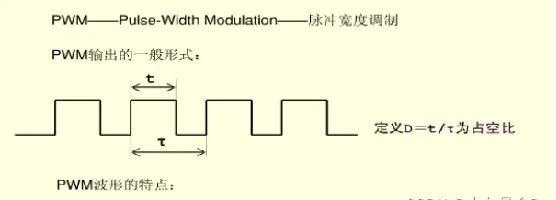
这里补充一下PWM技术,我们常说的PWM可以理解为一组方波,其周期就是两个相邻的上升沿或者两个相邻下降沿的时间,上述舵机使用的就是一个周期为20毫秒的PWM驱动;而占空比就是在一个周期内高电平的时间。
PWM技术简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在测量、通信、工控等方面。
PWM的频率:
是指在1秒钟内,信号从高电平到低电平再回到高电平的次数,也就是说一秒钟PWM有多少个周期,单位Hz。
PWM的周期:
T=1/f,T是周期,f是频率。
如果频率为50Hz ,也就是说一个周期是20ms,那么一秒钟就有 50次PWM周期。
占空比:
是一个脉冲周期内,高电平的时间与整个周期时间的比例,单位是% (0%-100%)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
双舵机模糊控制在智能车控制中的应用介绍2023-09-19 932
-
电磁循迹智能车是由哪些模块组成的2022-01-14 1396
-
请问智能车怎么依靠舵机实现左右转向?2019-06-24 4948
-
基于红外传感技术的STM32智能车2019-02-28 3114
-
基于光电管路径识别的智能车系统设计2018-11-06 2157
-
智能车系统解决方案总体设计2018-10-24 2735
-
智能车舵机控制算法详解2018-05-11 33092
-
飞思卡尔智能车舵机和测速的控制设计与实现pdf资料下载2018-03-16 1138
-
飞思卡尔智能车控制PWM的引脚在哪2017-02-28 5321
-
智能车2013-08-27 4246
-
飞思卡尔智能车制作全过程2012-05-18 40136
-
飞思卡尔智能车的舵机测试程序2011-01-06 2550
-
飞思卡尔智能车舵机和测速的控制设计与实现2010-02-11 1320
全部0条评论

快来发表一下你的评论吧 !
