

PID临界比例法和一般调节法介绍
描述
临界比例法
内容
在闭环的控制系统里,将调节器置于纯比例作用下,从小到大逐渐调节比例系数,直到系统曲线出现等幅振荡,再根据经验公式计算参数。
调节思路
① 将积分、微分系数置零,比例度取适当值,平衡操作一段时间,使控制系统按纯比例作用的方式投入运行
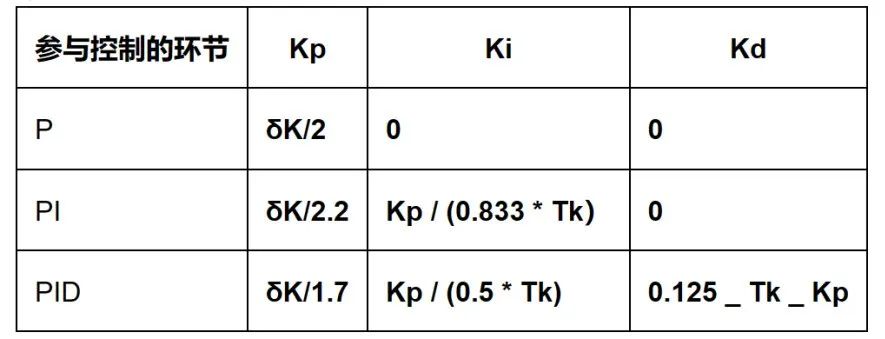
② 慢慢地增大比例系数,细心观察曲线的变化情况。如果控制过程的曲线波动是衰减的,则把比例系数继续增大;如果曲线波动是发散的,则应把比例系数减小,直至曲线波动呈等幅振荡,此时记下临界比例系数 δK 和临界振荡周期 Tk 的值
③ 根据记下的比例系数和周期,采用经验公式,计算调节器的参数
一般调节法
内容
这种方法针对一般的 PID 控制系统所以称之为一般调节法。
调节思路
① 首先将积分、微分系数置零,使系统为纯比例控制。控制对象的值设定为系统允许的最大值的 60%~70%,接着逐渐增大比例系数,直至系统出现振荡;
此时再逐渐减小比例系数,直至系统振荡消失,然后记录此时的比例系数,并设定系统的比例系数为当前值的 60%~70%
② 确定比例系数后,设定一个较小的积分系数,然后逐渐增大积分系数,直至系统出现振荡;此时在逐渐减小积分系数,直至系统振荡消失,然后记录此时的积分系数,并设定系统的积分系数为当前值的 55%~65%
③ 微分系数一般不用设定,为 0 即可。若系统出现小幅度振荡,并且通过 PI 环节无法优化,这可以采用与确定比例、积分系数相同的方法,微分系数取系统不振荡时的 30%左右。
④ 系统空载、带载联调,再对 PID 参数进行微调,直至满足要求
在使用PID时,如果只使用一个参数是没有意义,至少使用两个参数,并且P(比例项)是必须要有的
虽然PID有三个参数,但大多数情况下PID三个参数并不是都使用上的,一般会其中两个来组合使用,比如PI组合用于追求稳定的系统,PD组合用于追求快速响应的系统
当然PID用于即追求稳定又追求快速响应的系统,但是实际上PID参数越多越难调,而且许多情况下两个参数的效果已经足够了,所以我一般根据情况使用前两个。
-
看完这个故事你就明白了PID控制原理2018-11-26 10633
-
labivew PID.VI只用比例调节怎么一点超调都没有2014-05-11 3154
-
PID算法详解2016-03-23 10826
-
求一个可以观察PID曲线的软件2017-12-02 6194
-
干货|最经典的PID参数整定教程2017-12-26 13813
-
经验法整定PID参数的实用口诀2018-01-04 3978
-
PID算法新手感悟与总结2018-07-06 3240
-
智能小车 PID代码分享2018-07-30 9820
-
最简单也最经典:学习一下PID 控制算法2019-09-22 6130
-
电路的一般分析方法2009-07-08 597
-
一般水处理方法及原理2009-11-19 3524
-
关于凑试法来确定PID的参数2011-04-22 1085
-
PID控制算法的详解和PID代码免费下载2019-10-22 1438
-
在线测量法一般有哪些步骤?2022-12-06 1037
-
PID参数整定试凑法介绍2023-11-14 4270
全部0条评论

快来发表一下你的评论吧 !
