

基于图像处理的PCB自动检测系统的设计与研究(一)
PCB设计
描述
摘要:研究一种高、大场景、快速实时的PCB缺陷自动光学检测系统,分别进行了硬件结构和软件系统的设计。该系统主要由二维运动平台、电机控制模块、图像采集模块、图像处理模块、结果分析模块组成。改进的步进电机驱动方式--细分驱动以及改进的图像识别算法保证了系统的准确率,一键式自动检测的设计提高了检测速度。实验结果证明,该系统能快速并准确的检测出PCB上的缺陷,有一定的实用和开发价值。
电子产品的部分--印刷电路板(PCB),是集成各种电子元器件的信息载体,在各个领域得到了广泛的应用,是电子产品中不可缺少的部分。PCB的质量成了电子产品能否长期、正常、可靠的工作的决定因素。随着科技的发展,PCB产品的高密度、高复杂度、高性能发展趋势不断挑战PCB板的质量检测问题。传统PCB缺陷检测方式因接触受限、高成本、低效率等因素,己经逐渐不能满足现代检测需要,因此研究实现一种PCB缺陷的自动检测系统具有很大的学术意义和经济价值。国内外研究的PCB缺陷检测技术中,AOI(Automatic OpticInspection自动光学检测)技术越来越受到重视,其中基于图像处理的检测方法也成为自动光学检测的主流。本文通过图像处理技术研究了一种大视场、高、快速实时的PCB缺陷自动检测系统,设计了硬件结构和软件算法流程。通过改进的电机驱动方式配合一键式自动检测软件的设计,大大提高了系统的检测速度,对结果分析模块的缺陷识别算法的改进提高了检测结果的准确性。

1.系统结构
PCB缺陷自动检测系统主要由运动控制模块、图像采集模块、图像处理模块、结果分析模块组成。系统工作过程如下:上位机控制步进电机运动,步进电机带动二维平台运动,将CCD摄像机传输到待检测PCB上方,对PCB进行大场景图像采集,采集的图像经过图像采集卡送到上位机,上位机软件对采集的图像进行拼接、图像预处理,对处理的图像进行准确定位并校准,通过图像分割、图像形态学处理等,进行模板匹配、图像识别,得出缺陷检测结果。系统设计包括硬件设计和软件设计,系统软硬件相互协调工作构成一个整体。
2.系统硬件设计
PCB缺陷自动检测系统的硬件设计主要包括二维运动平台、电机运动控制板、电机驱动板、CCD摄像机、图像采集卡、PC等。
2.1 CCD摄像机和图像采集卡
CCD摄像机的主要特性参数包括摄像机制式、光敏面尺寸、像素尺寸、分辨率、电子快门速度、同步系统的方式、照度、灵敏度、信噪比等。其中摄像机制式和是否在线检测决定了图像采集卡的采样频率,光敏面尺寸、像素尺寸、分辨率以及成像透镜系统的放大率的平衡选择取决于测量范围和测量。考虑到以上各个因素以及系统要求,在实验中采用的是广州视安公司的枪式摄像机,该摄像机的特点是数字面阵CCD逐行扫描,提供AV复合视频接口和标准镜头接口,提供VC的SDK软件开发包,方便设计软件处理模块。
图像采集卡,又称视频捕捉卡,是视频卡的一种类型。图像采集卡完成的主要功能是把摄像机的连续模拟视频信号转换成为离散的数字量。其基本原理:从摄像机输出的各种制式的视频输出信号,经过输入选择模块处理后,形成能被图像采集卡识别的视频信号。模拟视频信号经过转换后,存储在卡上的帧缓存存储器内,由计算机CPU通过计算机总线控制具体的图像传递,终存储在计算机的内存或硬盘,用于图像处理。本设计采用的图像采集卡型号是: NV7004-N,将CCD摄像机模拟信号转化为数字信号传输到上位机实时显示,并能完成图像的抓拍功能。
2.2 电机运动控制器及精密二维运动平台
PCB缺陷自动检测系统的运动控制器为自行设计的MCU控制板,芯片为ATMEL公司生产的单片机AT89S52,控制板通过RS-232串行通信接口与上位机进行通信。通过操作人机交互界面对控制板发送命令,控制板输出控制信号以及各种频率的方波信号到步进电机驱动板,以控制步进电机的转速、方向以及移动距离。
二维运动平台由两个日本SUS Corp公司生产的精密运动导轨搭建,运动导轨为滚珠丝杆型,非常精密,误差很小。步进电机与运动导轨相连,从而带动导轨的运动。步进电机为日本TAMAGAWA公司生产的两相四线制混合式步进电机,该型号步进电机运行稳定、噪声小。
2.3 电机驱动
步进电机的驱动实际上就是通过控制步进电机的各相励磁绕组的电流,使步进电机的内部磁场合成方向发生变化,从而使步进电机转动起来。各相励磁绕组的电流产生的合成磁场矢量的幅值决定了步进电机旋转转矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。
这里介绍步进电机两个重要概念:齿距角θz和步距角θn.步进电机齿距角是指步进电机运行时两相邻稳定磁场之间的夹角。
步距角是指对应一个脉冲信号,步进电机转子转过的角度位移量。步距角不仅与电机的齿数有关,还和电机的运行拍数有关。步进电机的齿距角θz和步距角θn可表示为:
步进电机的细分是基于步进电机的各相绕组理想对称和距角特性严格正旋的基础上,通过控制电动机各相绕组中电流的大小和比例,使步距角减小到原来的几分之一至几百分之一,从而提高步进电机的分辨率。以两相步进电机为例,若电机的齿数为50,运行拍数是单四拍方式时,则步距角为θ=360度(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步0.八拍和四拍方式相比,步距角θn减小了一倍,实现了步距角的二细分。
在拍数一定的情况下,齿数越多,步距角就越小,但由于受制作工艺的限制齿数不能做得很多,因此步进电机的步距角就不可能很小。改变步进电机的拍数也可以改变步距角,拍数是指完成一个磁场周期性变化所需脉冲数或导电状态,或指电机转过一个齿距角所需脉冲数。当步进电机的相数确定时,拍数也就确定。通过增加步进电机的齿数和相数来减小步距角,步距角减小的度数非常有限,很难满足生产的要求。
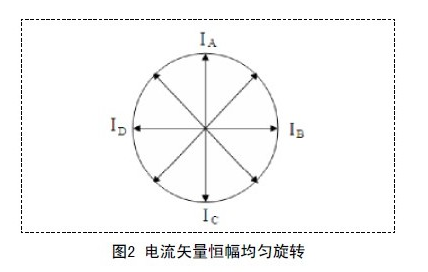
步进电机细分驱动常用的方法是电流矢量恒幅均匀旋转法。电流矢量恒幅均匀旋转法能够使细分后的步距角均匀,输出力矩恒定。具体方法是使m相绕组分别通以相位差为2π/m而幅值大小相等的正弦电流,则电流合成矢量或磁场矢量就会在空间上作旋转运动,且合成矢量的幅值保持不变。如给四相混合式步进电机的四相绕组分别通以相位相差π/2,幅值相等的正弦波电流,则合成的电流矢量如图所示。
为了尽可能得到圆形的合成磁场,使步距角变化均匀,各相绕组电流参考信号采用阶梯状正弦波形较为理想。以四相步进电机8细分为例,在每一相中插入7个稳定的中间状态,细分后各相电流是以1/4的步距上升或下降,则原来一步所转过的角度将由8步完成,即可实现步距角的8细分。
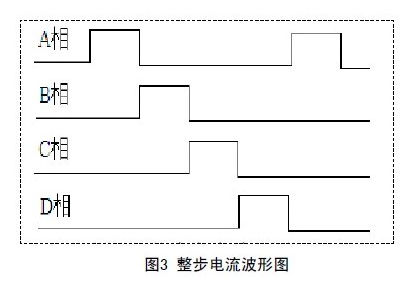
细分数越多,电流变化越小,从而大大减少了电机的振荡和噪音。采用阶梯状正弦波对电流进行细分时,阶梯越多(即细分数越多),波形就越接近正弦波,通入的阶梯电流就越小,步距角也就越小。从而大大减少了步进电机运行时的丢步率,降低了步进电机运行时的噪音和颤动,也使步进电机运行更加稳定,更易于控制。
-
基于图像处理的PCB自动检测系统的设计与研究(二)2023-11-15 1456
-
水箱溢流自动检测系统2022-11-17 761
-
基于图像的织物疵点自动检测技术2022-08-17 2619
-
基于LABVIEW的光学透镜多参数自动检测系统2021-06-22 1182
-
基于图像处理的PCB自动检测系统的设计与研究(第一部分)2018-09-13 2295
-
燃气表阀门参数自动检测系统研究_余盛锋2017-01-16 902
-
基于USB和LabVIEW的ECU自动检测系统的设计2016-03-23 1177
-
基于PXI和SCXI板卡系统的空调自动检测和故障诊断2010-07-02 1808
-
一种人体体温自动检测监护系统的设计研究2009-11-28 57610
-
用于表面裂纹自动检测的图像识别算法2009-07-18 1187
-
雷达故障自动检测系统2009-07-15 767
-
导弹发射机构自动检测装置的研究与设计2009-05-19 1157
-
自然图像中的对象自动检测和提取2009-04-01 642
全部0条评论

快来发表一下你的评论吧 !
