

工业相机拆解分析
电子说
1.4w人已加入
描述
之前预言的项目暂停了,为之而做的硬件设备也就暂时没人用了,正好多出来一个工业相机,想着里面到底是什么样子,于是乎突发奇想,拆开来瞅瞅。先介绍一下摄像头本身的性能吧:
| 型号 | MV-GE502GM |
| 传感器 | 1”CMOS |
| 快门类型 | 全局快门 |
| 相机类型 | 黑白 |
| 像元尺寸 | 4.8X4.8μm |
| 有效像素 | 530万 |
| 分辨率@帧率 | 2592X2048@22FPS |
| 1600X1200@57FPS | |
| 640X480@260FPS | |
| 像素位深度 | 10bit |
| 灵敏度 | 7.5V/lux-s550nm |
| GPIO | 6-pin Hirose接头,1路光隔触发输入(可复用为输入GPIO),一路光隔闪关灯输出 (可服用为输出GPIO);可增配2路输入3路输出(双6pin Hirose接头) |
| 采集模式 | 连续性/软触发/硬触发 |
| 最大增益(倍数) | 8 |
| 曝光时间范围(ms) | 0.005~327 |
| 滤光片 | 黑白相机标配双面AR增透片 |
| 帧缓存 | 32M Bytes |
| 用户自定义数据区 | 2K Bytes |
| 视频输出格式 | Bayer8、Bayer12、Mono8、Mono12、Mono16、RGB8、RGB32、RGB48 |
| 视觉标准协议 | 支持GigE Vision协议、GenICam协议 |
| 镜头接口 | 默认C接口,可选C或者CS接口,可提供M12镜头转接接口配件 |
| 数据接口 | RJ45 千兆以太网接口 , 向下兼容100M网络制式 |
| 电源供电 | 9~24V(POE为选配) |
| 功率 | <2.5W |
| 外形尺寸 | 29(mm)X29(mm)X40(mm) |
| 重量 | 小于75g |
| 工作温度 | 0~50度 |
| 工作湿度 | 20~80%(无凝结) |
| 存储温度 | -30~60度 |
| 存储湿度 | 20~95%(无凝结) |
| 操作系统 | WINXP、WIN7/8/10 32&64为系统;Linux和ARM linux驱动、安卓平板驱动(可定制)、MAC OS系统 |
| 驱动程序 | Directshow组件Halcon专用组件Labview专用驱动OCX组件TWAIN组件 |
| 编程语言包 | C/C++/C#/VB6/VB.NET/Delphi/BCB/Python/Java |
| 其他功能 | 支持任意尺寸的ROI自定义分辨率、对比度和伽玛调节、饱和度调节、白平衡校正、 黑电平校正、自定义死点坐标校正、ISP图像处理加速、3D降噪、自定LUT表、帧率调节、自定义相机名称等 |
外观看一下





小编手里的相机是配套镜头的所以看上去比较长,实际工业相机本体的尺寸还是比较小的为29(mm)X29(mm)X40(mm) (不含镜头底座和后壳接口)。MV-GE502GM通体黑色,外壳是金属材质,喷漆处理,U形壳件通过黑色螺丝相互固定。尾部是通信接口,一个千兆以太网的RJ45接口,另外一个是GPIO输入输出接口。
拆开外壳




遇到一个小尴尬的事情,小编把所有螺丝都拆掉后仍然无法把外壳取下来,找了一圈,终于在合格标下面找到了最后一颗螺丝的藏身之处,把其拧下来,就可以拆掉金属外壳。
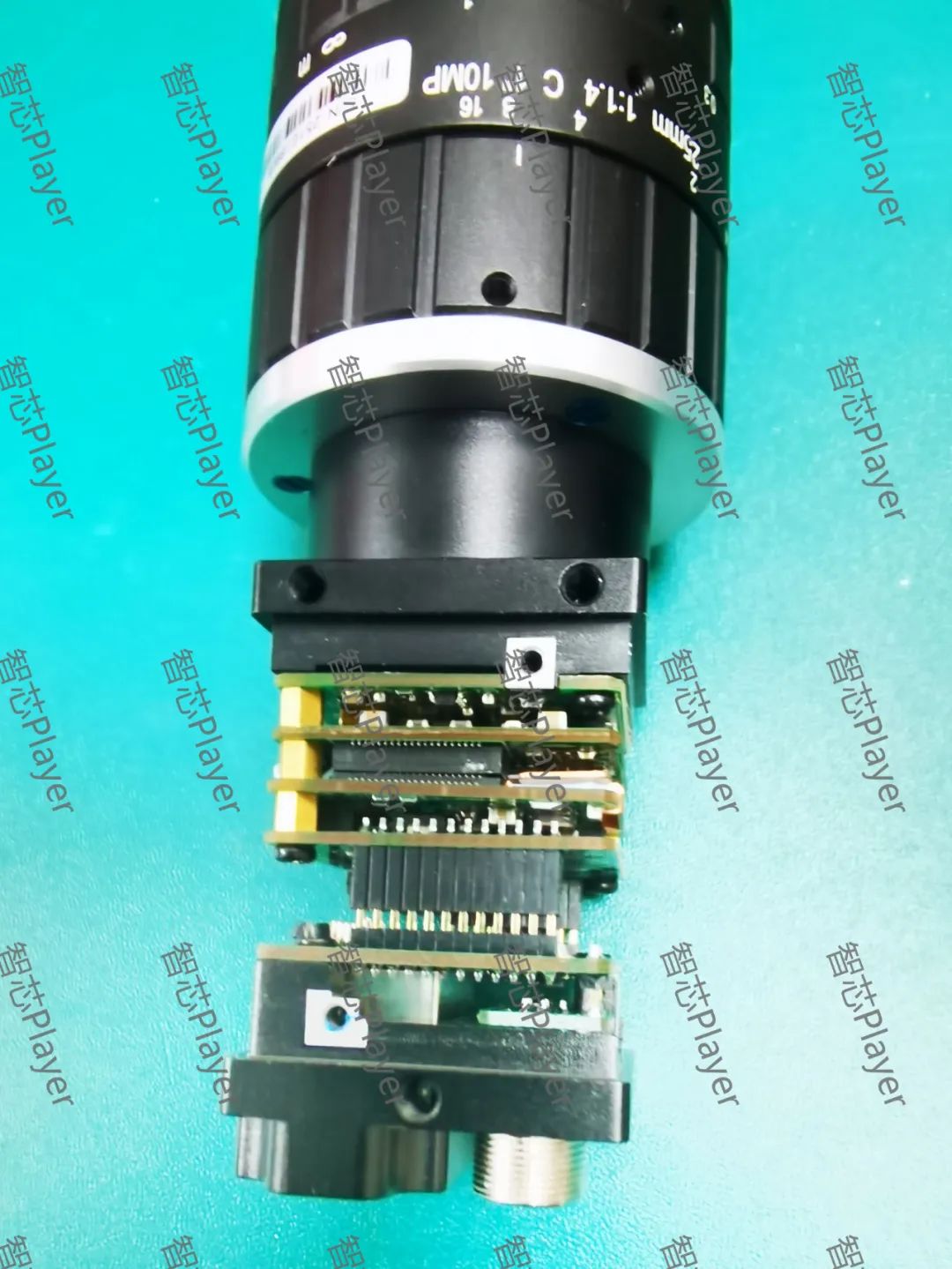
可以看到内部是一个塔式的结构,也可以说是叠层的结构。每一个板子都通过接插件连接到下一块板子,把本来在一张PCB上的电路功能,因为结构的需求,分到5块小的PCB上,这设计也可以算是比较巧妙的了。PCB之间除了接插件之外还通过铜螺柱相互固定以此增加机械强度。
产品内部拆解
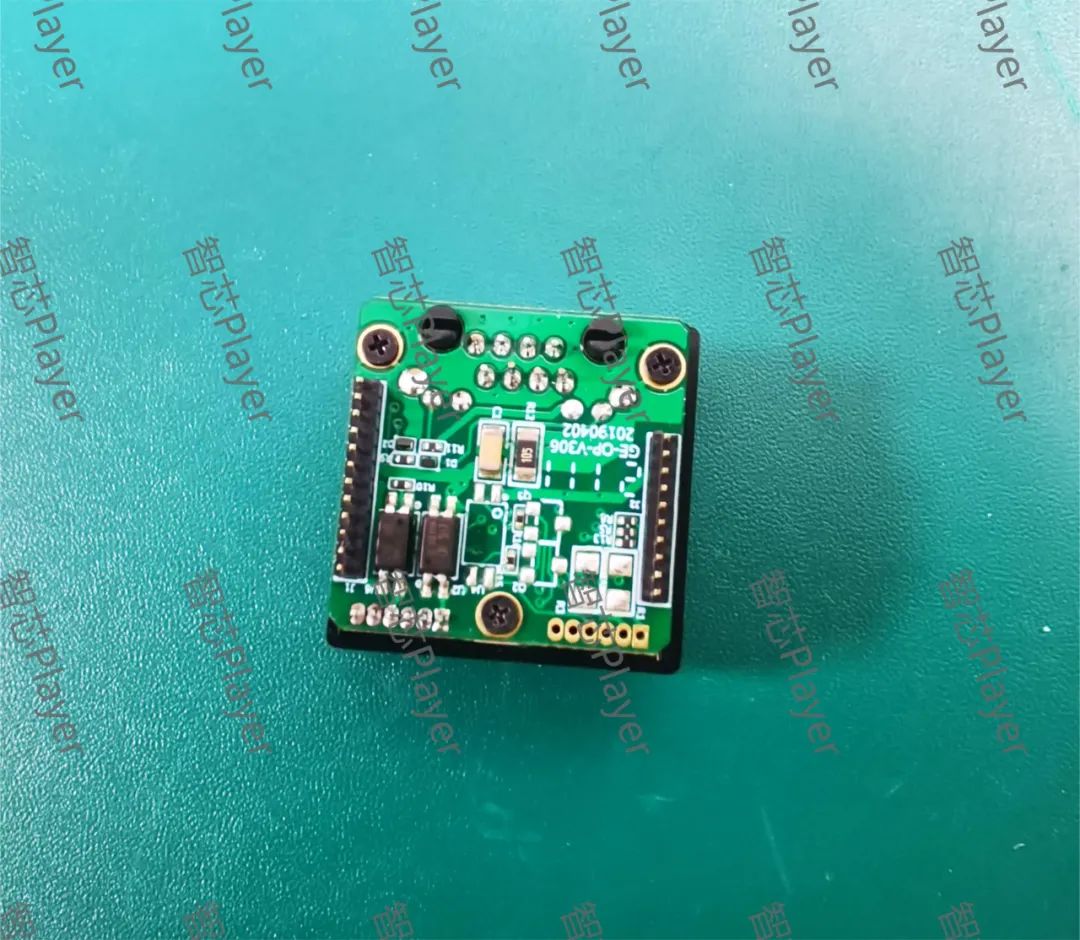




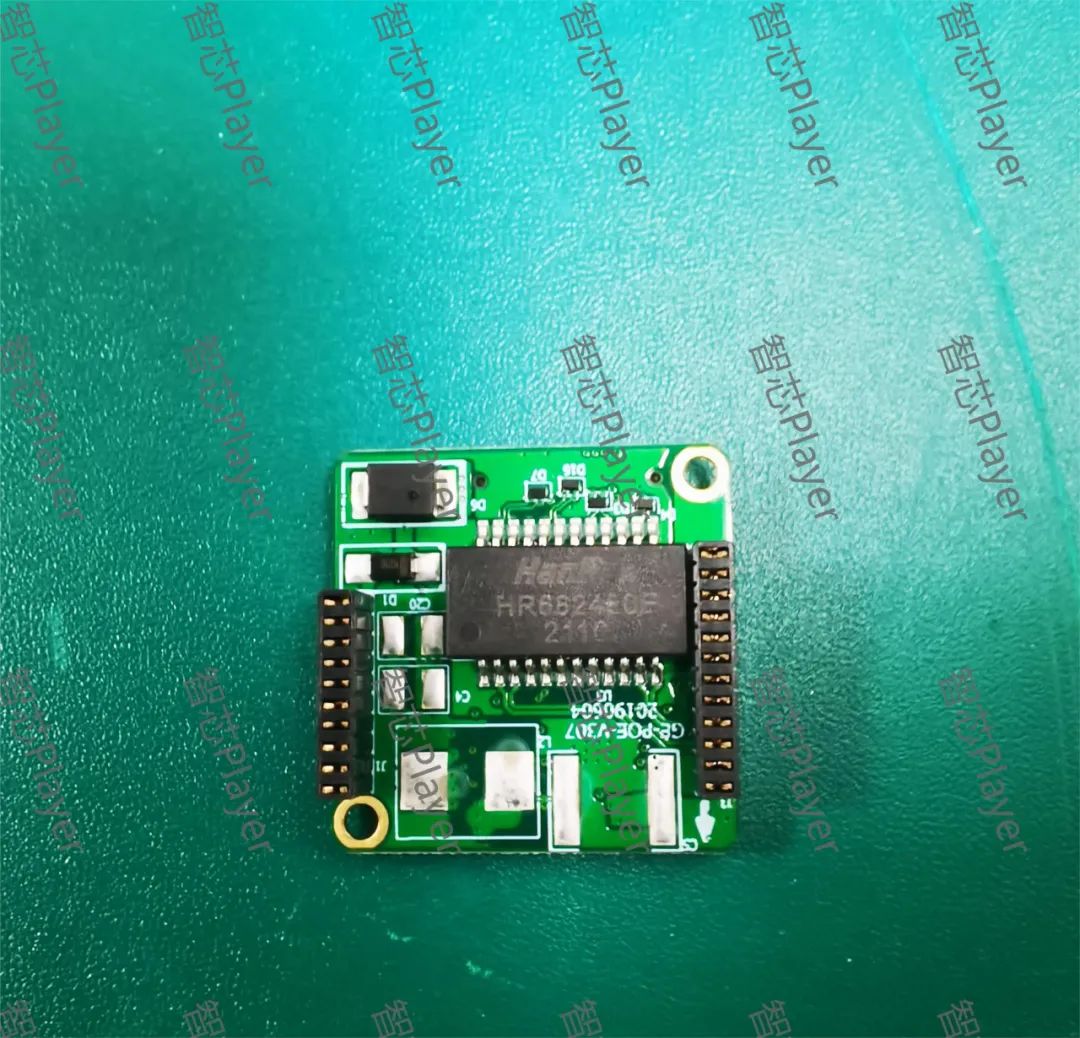





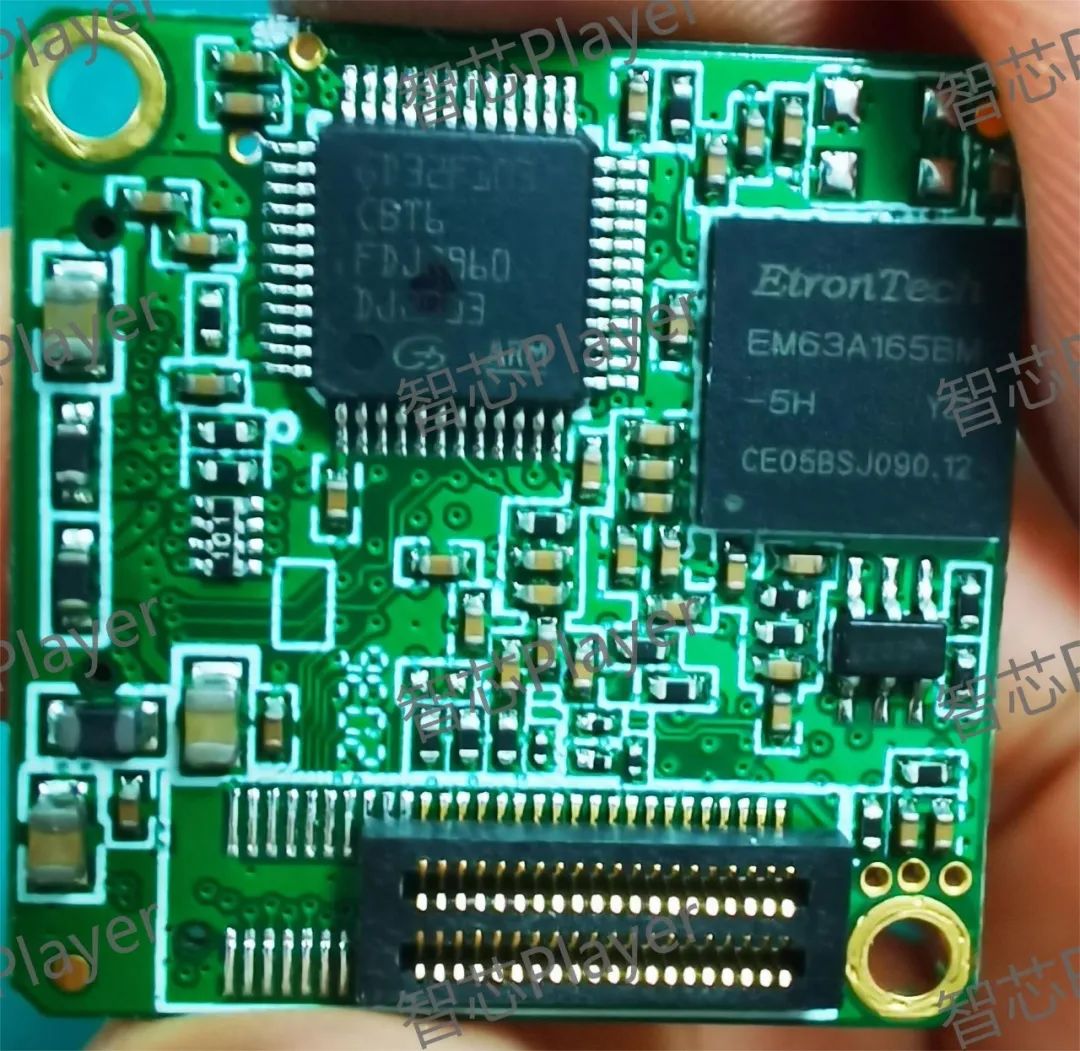



这个工业相机是麻雀虽小五脏俱全,从主控到FPGA,存储芯片,CMOS传感器,散热铜牌。小编根据丝印搜索了一下,以太网变压器芯片:HR682480,MCU:GD32F103CBT6,存储芯片:EM63A165BM-5H,FPGA:Cyclone@IV EP4CE22F17C8N。
拆解完毕


作为一个合格的拆解人员,螺丝螺帽必须一个不落的收起来,并且一个不落的安装回去。最后给各位奉上全家福图片一张,至此拆解完毕。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【操作教程】CXP接口采集卡搭配线扫工业相机外触发教程# 工业相机志强视觉科技 2026-05-14
-
工业相机的作用及未来发展2025-05-21 1407
-
深视智能高速相机观测水滴滴落过程#高速相机 #高清高速相机 #高速工业相机 #工业相机 #机器视觉 #传感器深视智能科技 2024-11-12
-
Ladybug 360°成像 全景公寓#工业相机志强视觉科技 2023-11-13
-
工业相机选型教程2# 工业相机# 工业相机选型#志强视觉科技 2023-09-22
-
回收AVT工业相机,basler工业相机,sony工业相机2021-10-19 653
-
【求购】基恩士工业相机/康耐视工业相机/CCD工业相机等等工业镜头2020-07-10 1130
-
如何选择合适的工业相机,工业相机的优势2020-06-19 2972
-
工业相机和普通相机的区别2020-06-09 7109
-
工业相机的基本原理是什么?发展如何?2019-09-11 12667
-
小蚁运动相机高清拆解图集2018-10-29 23397
-
富士AV205相机—拆解照片2017-05-08 3978
全部0条评论

快来发表一下你的评论吧 !
