

基于车辆运动学模型的控制方法
描述
车辆运动学模型
基于车辆运动学模型的控制方法主要考虑了车辆的运动学约束对车辆控制的影响。
平时见到的汽车属于 阿克曼转向,通常可以简化为两轮的自行车模型
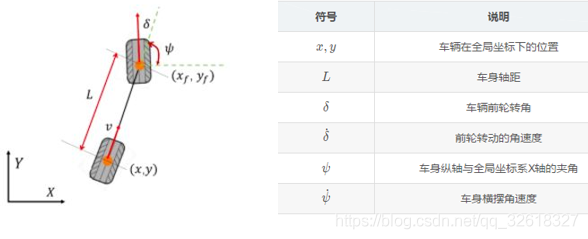
其假设车辆的前后轮均为刚体,只能沿着车轮滚动的方向前进,无侧向滑动
由上述假设可得自行车模型的运动微分方程如下式:


纯跟踪控制算法
纯跟踪控制算法(Pure Pursuit)是一种典型的横向控制方法,最早由 R. Wallace 在1985年提出,该方法对外界的鲁棒性较好。
该算法的思想:
基于当前车辆 后轮中心 位置,在参考路径上向 l lld (自定义)的距离匹配一个预瞄点,假设车辆后轮中心点可以按照一定的转弯半径
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人运动学中的非完整约束与运动模型推导2024-01-18 5167
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 4020
-
基于车辆动力学模型的横向控制2023-11-15 2366
-
开源七轴myArm协作机械臂正逆运动学技术讲解2023-11-06 3531
-
自动驾驶车辆控制(车辆运动学模型)2023-06-07 980
-
机械臂运动学模型的知识点汇总,绝对实用2022-01-20 2045
-
浅析麦克纳姆轮的运动学和运动控制2021-08-30 1875
-
MATLAB中的运动学机械臂算法2019-09-11 12268
-
橡胶衬套刚度对悬架运动学的影响_李林华2017-03-15 1312
-
机器人运动学(精品教程)2016-12-12 1033
-
第一章 质点运动学2016-05-11 730
-
工业机器人运动学-1数学基础2016-02-25 1367
-
基于回转变换张量的6R机器人运动学研究2009-12-18 626
-
基于FPGA和模糊控制的模型车运动学仿真2009-09-11 628
全部0条评论

快来发表一下你的评论吧 !
