

LQR横向控制算法的求解
描述
LQR 横向控制算法的求解
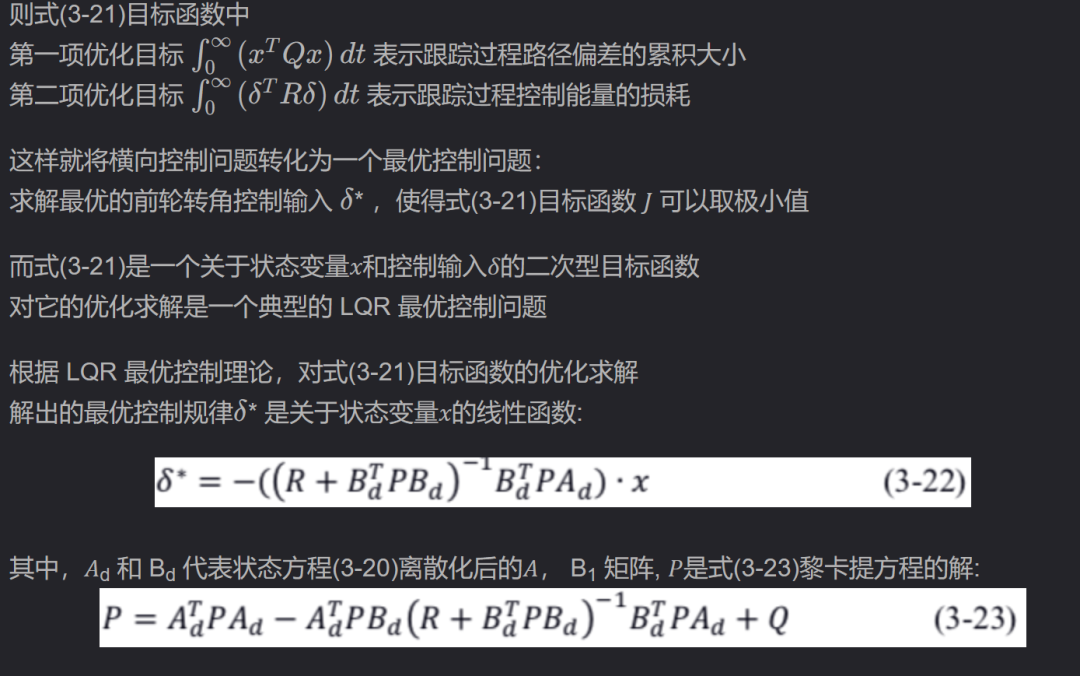
期望的响应特性就是 跟踪偏差能够快速、稳定地趋近于零,并保持平衡,同时前轮转角控制输入又尽可能小,这就是一个典型的多目标优化最优控制问题。
且优化的目标函数可以表示为跟踪过程累计的跟踪偏差与累计的控制输入的加权和。
如式(3-21)所示:

其中, Q为半正定的状态加权矩阵, R为正定的控制加权矩阵,且 Q,R通常取为对角阵
Q矩阵元素变大意味着希望跟踪偏差能够快速趋近于零,R矩阵元素变大意味着希望控制输入能够尽可能小
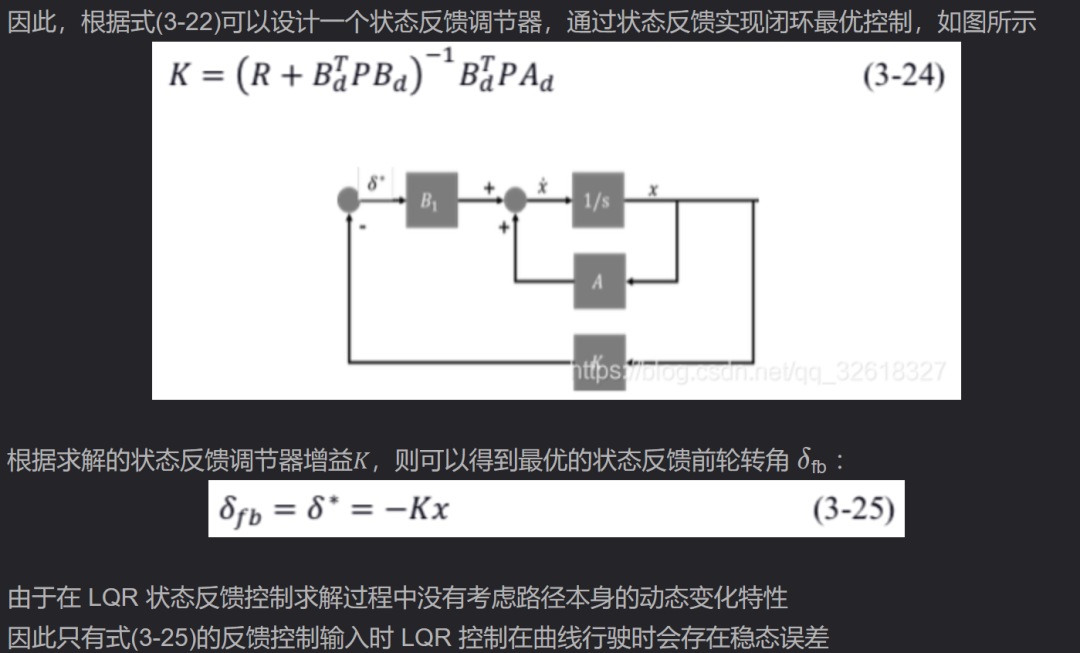
由于在 LQR 状态反馈控制求解过程中没有考虑路径本身的动态变化特性,因此只有式(3-25)的反馈控制输入时 LQR控制在曲线行驶时会存在稳态误差。
稳态误差是系统从一个稳态过渡到新的稳态,或系统受扰动作用又重新平衡后,系统出现的偏差。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于车辆动力学模型的横向控制2023-11-15 2340
-
LQR控制算法之最优控制2023-05-19 6057
-
高速列车多目标约束横向半主动控制算法2021-06-29 937
-
Apollo代码学习—MPC与LQR比较2019-03-22 17418
-
一种多谐振最优伺服控制算法在中频电源设计中应用2018-04-24 1560
-
求解#SMT问题的局部搜索算法2018-01-09 1161
-
一种求解RTVKP问题的精确算法2018-01-03 977
-
基于故障树最小割集求解算法2017-11-21 2299
-
一级倒立摆的LQR控制与遗传算法下的LQR控制算法2015-10-28 940
-
lqr算法小程序2014-07-09 4456
-
基于FPGA的横向LMS算法的实现2010-12-07 1064
-
基于LQR 的直升机最优控制系统的设计Design on a2009-06-06 654
-
一种求解关键路径的新算法2009-04-23 587
全部0条评论

快来发表一下你的评论吧 !
