

滑模控制是什么 优缺点有哪些
描述
- 滑模控制目的
对于滑模控制而言,我觉得我们先要明白其目的再来学习。
一开始我们对滑动控制的定义是:滑动模式是先使用受控系统产生两个以上的子系统,然后再刻意加入一些切换条件产生滑动模式,以达成控制目标的一种技术。
滑模控制(sliding mode control, SMC)也叫变结构控制,其本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。
这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。
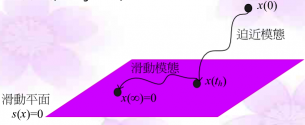
例如滑动模式控制中存在滑动曲面s=0,一开始时,系统会在有限时间内到达滑动曲面,之后就会沿着滑动曲面移动。
在滑动模式的理论叙述中,系统会约束在滑动曲面上,因此只需将系统视为在滑动曲面上滑动。
不过实际系统的实现是用高频切换来让系统近似在滑动曲面上滑动,高频切换的控制信号让系统在很邻近滑动曲面的范围内切跳(chatter),而且其频率是不固定的。
虽然整体系统是非线性的,不过下图中,当系统到达滑动曲面后,理想(没有切跳)系统会限制在s=0的滑动曲面上,滑动曲面是线性时不变系统,在原点处指数稳定。
- 滑模控制优缺点
2.1 滑模控制的优点:
滑动模态可以设计且与对象参数和扰动无关,具有快速响应、对参数变化和扰动不灵敏( 鲁棒性)、无须系统在线辨识、物理实现简单。
2.2 滑模控制的缺点:
当状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,从而产生抖振——滑模控制实际应用中的主要障碍。
国内外主要通过改进滑模趋近律达到减弱抖振的目的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器视觉控制的优缺点有哪些2024-07-04 2340
-
基于滑模控制的新型Boost正弦波逆变器2023-03-07 660
-
无刷电机和有刷电机的优缺点2022-01-27 69240
-
什么是OFDM?有什么优缺点?2021-10-09 12540
-
智能滑模变结构控制2021-09-30 1018
-
FPGA有哪些优缺点?2021-09-18 1962
-
小米mix4优缺点有哪些2021-08-11 18540
-
无人机有什么优缺点2020-01-29 84876
-
感应电机组合滑模位置控制2018-03-12 1052
-
滑模控制问题求教2016-08-21 7344
-
基于滤波器的机器人滑模控制及仿真2009-10-06 678
-
一种基于滑模控制的正弦波逆变器2009-07-15 1602
-
半主动悬架的滑模变结构控制2009-04-17 1144
-
适应滑模变结构的永磁同步电机控制介绍2009-04-03 642
全部0条评论

快来发表一下你的评论吧 !
