

Simulink中如何创建一个Publisher
描述
创建一个Publisher
配置一个block,并向/location的节点发送一条geometry_msgs/Point类型的消息。
需要做到以下几个步骤:
1.在MATLAB工具条中,选择Home>Simulink来打开Simulink的起始页。
2.在Simulink开始页,单击空白模型创建并打开一个新的Simulink模型。
3.在Simulink工具条中,选择Simulation > Library Browser打开Simulink库浏览器。单击ROS工具箱选项卡(也可以在MATLAB命令窗口中输入roslib)。选择ROS库。
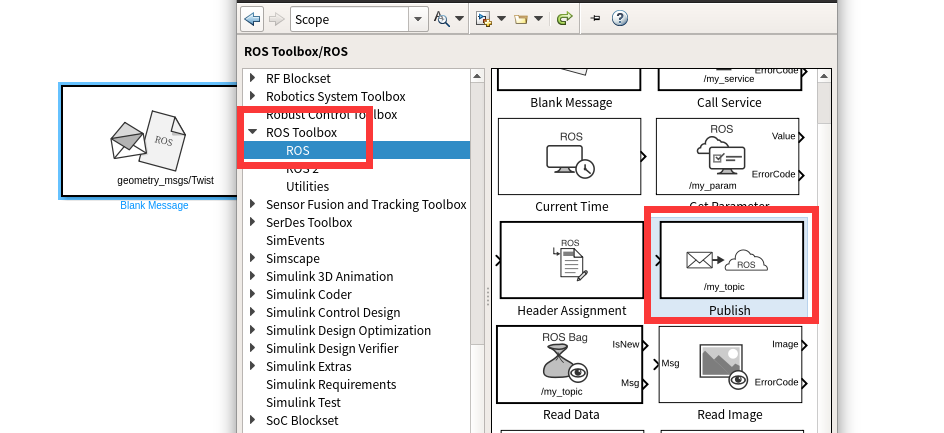
4.将Publish块拖到模型中。双击该块以配置主题和消息类型。
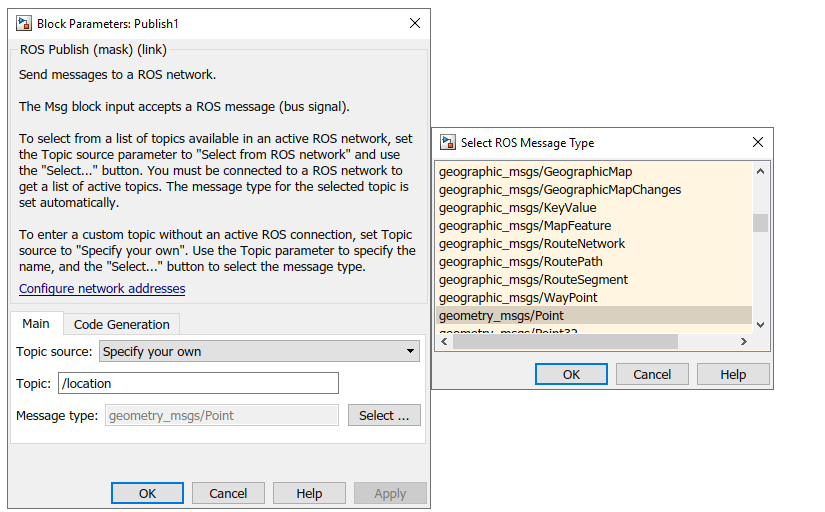
5.为Topic源选择Specify your own,并在Topic中输入/location。
6.单击 Message type后的Select按钮。将出现一个弹出窗口。选择geometry_msgs/Point,单击OK关闭弹出窗口。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Simulink自定义模块开发教程 Simulink 在控制系统中的应用2024-12-12 4115
-
电路仿真软件simulink的工作原理2024-03-29 3718
-
Matlab中创建一个Message方法2023-11-15 1995
-
使用MATLAB Simulink和HDL编码器创建自定义IP--AWB2023-11-13 2694
-
如何在Automation Builder中创建一个新工程2023-03-08 2816
-
如何建立一个simulink模型2021-12-17 1220
-
如何在Simulink中使用Matlab Function创建一个全局变量?2021-11-19 2457
-
通过一个简单的Simulink模型生成代码2021-08-18 1724
-
如何在Simulink中使用Matlab Function创建一个全局变量2021-08-17 1692
-
专家支招:使用MATLAB和Simulink算法创建FPGA原型2013-01-28 17398
-
simulink__matlab教程2010-11-04 1194
-
Simulink建模与仿真教材2009-04-19 905
-
ALLEGRO DESIGN PUBLISHER2008-10-16 1088
-
simulink建模与仿真 下载2008-06-16 2304
全部0条评论

快来发表一下你的评论吧 !
