

Ansys Motion凸轮轴(弹簧)刚柔耦合动力学仿真案例
描述
1
前言
当结构分析涉及弹簧部件时,需要考虑到弹簧在初始状态下可能存在多种张紧状态。在传统的结构有限元仿真分析中,通常使用简化单元(例如弹簧力)来模拟弹簧的行为,并考虑其初始预紧力,或者使用实体弹簧单元,执行从松弛状态到紧张状态的自由变形分析。虽然第一种方法易于建模,但其在分析弹簧的接触力、振动特性以及弹簧与其他组件接触情况方面存在局限性。另一方面,尽管后一种方法提供了更多的分析可能性,但它的建模和分析过程复杂,计算求解时间较长。
针对这类问题,Ansys Motion 作为一款专业的刚柔耦合动力学仿真工具,可以更全面更高效的解决这类问题。Ansys Motion 在大变形,非线性摩擦接触等,刚柔耦合等方面具有非常强的求解能力,同时通过 Motion 节点柔性体的形状更新功能,能够快速而准确地模拟机构的动力学行为,其中包括弹簧单元的动力学响应。这种方法不仅能够提供更精确的弹簧行为分析,还能够综合考虑弹簧与其他机构部件之间的复杂互动,从而实现更全面的结构动力学仿真。
本文主要介绍如何使用Ansys Motion 进行包含弹簧结构的动力学仿真,所使用的版本为Ansys Motion 2023 R1。
2
仿真流程
目前,Ansys Motion 支持两个平台使用,一个是集成在Ansys Workbench平台Wechanical 环境中,另一个是独立版的Motion,分为前处理器motion pre 2023 R1和后处理器motion post 2023 R1,用户可根据习惯选择熟悉版本,本文以Motion 独立版为例进行介绍。
2.1 分析方法
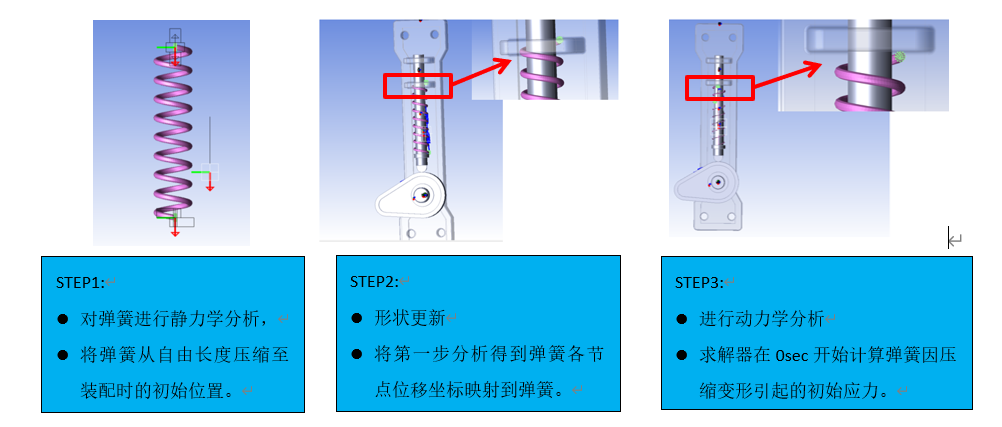
在此分析中,将弹簧设为柔性体,在Motion中使用节点柔性体对弹簧进行建模,其他部件设为刚体。首先对弹簧进行静力学分析,将弹簧从自由长度移动到装配的初始位置,此时弹簧将受到初始预紧力,然后将位移数据映射到机构分析中的弹簧。利用Ansys Motion 的形状更新功能(update position)生成初始状态。分析流程下图所示。
2.2 预分析-弹簧静力学分析
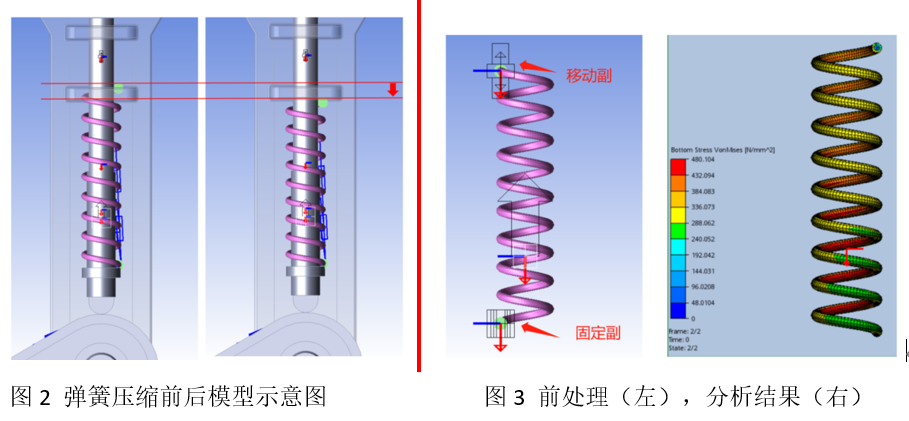
对于弹簧初始的模型,其自由状态长度比装配后的初始状态要长,在预分析时,只对弹簧进行静力学分析,其他部件抑制,将弹簧建模为柔性体,导入有限元模型,然后,在弹簧底部添加固定副,弹簧顶部添加平移副,压缩弹簧,使端部位于该位置上初始装配位置,如下图所示。
Ansys motion支持静力学分析,弹簧静力学分析网格可由Workbench Mechanical生成,并在Ansys motion中导入分析。
2.3 柔性体形状更新
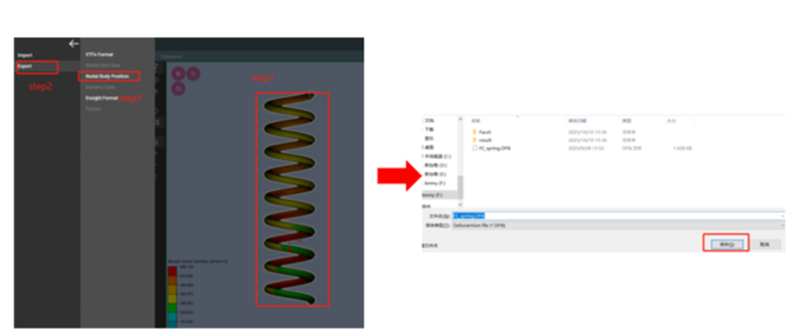
利用Ansys Motion 的形状更新功能,在求解完成后,可以在后处理器motion porst中按照指定时间步输出变形形状的位移到文件中,这里我们进行的是静力学分析,所以只需要输出最后的结果即可。在进行整体分析时,可将此文件检索到FEM模型中,以便在更新初始网格节点位置的情况下进行分析。操作流程如下:
在motion post中选择模型-export-nodal body-保存
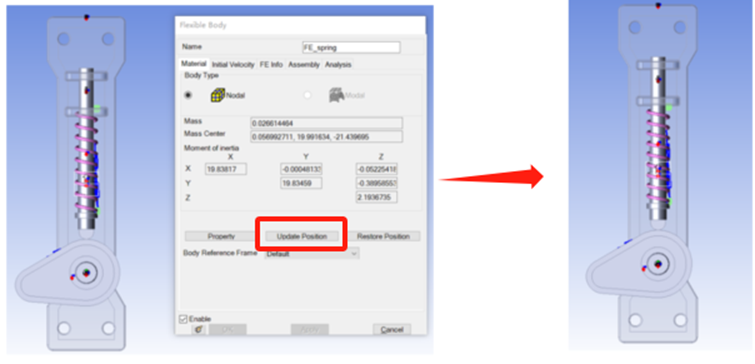
在motion pre中选择弹簧对象属性,使用update position更新形状。
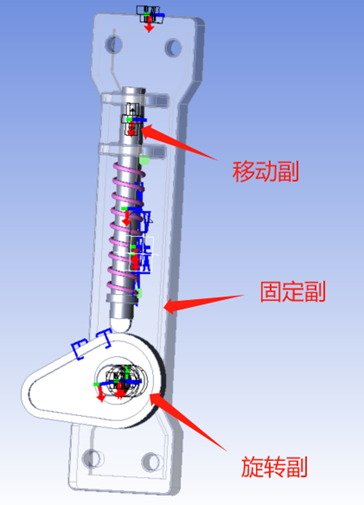
2.4 设置运动副和接触
运动副定义了每个零件之间的平移,固定和旋转关节(如下图所示)。对于凸轮旋转,我们定义了强制旋转,而不是扭矩,以便在定义的旋转接头上旋转一次。
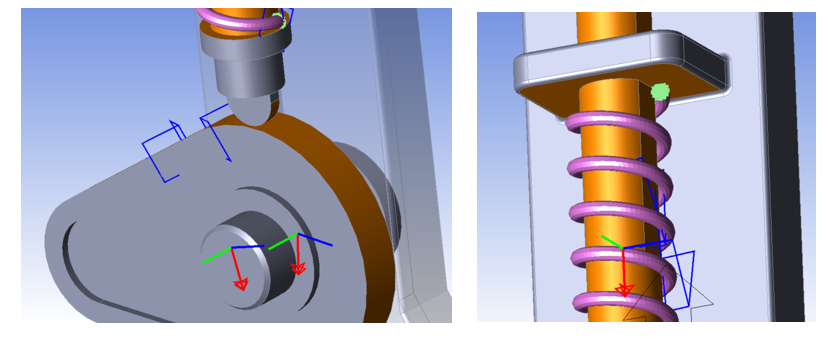
2.5 接触设置
这里共有四个接触对,凸轮-移动杆,弹簧与底座,弹簧与移动杆,如下图所示:
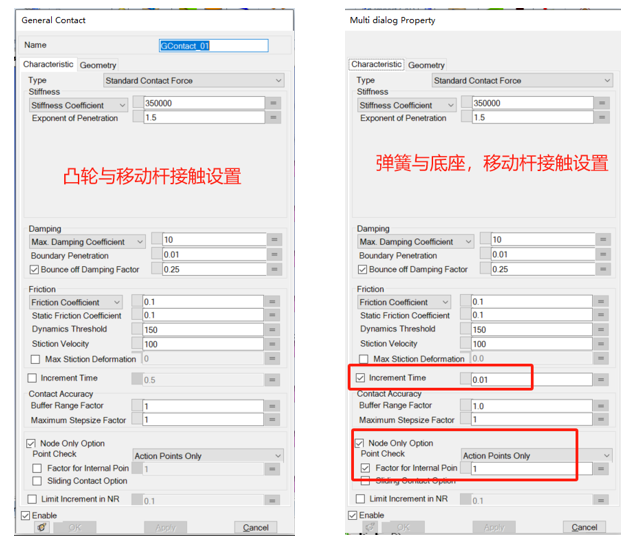
接触属性设置
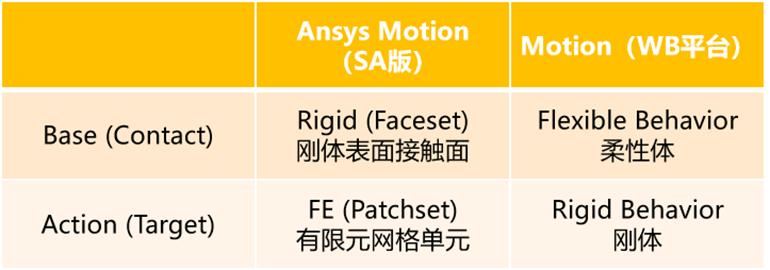
Mechanical环境中的contact对应的独立版中的Base,Target对应Action ;
2.6 结果后处理
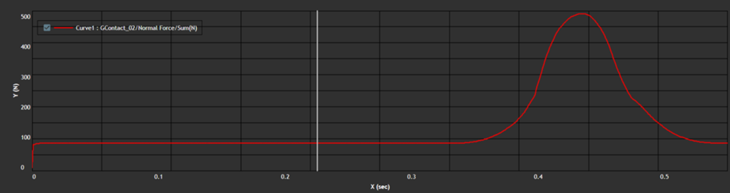
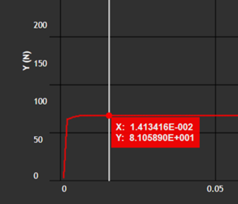
求解完成后,会自动打开motion post后处理器,下图为后处理器输出的凸轮弹簧机构动力学仿真动画,以及接触力时程曲线图
下图显示了弹簧和移动杆之间的法向接触力时程曲线图,图中形状更新后初始位置(点a)和弹簧释放压缩位移达到平衡状态(点b),通过形状更新功能,motion求解器在求解时会自动计算压缩变形所产生的预应力。点a的接触力0[N],因为它是在形状更新后初始结果,即柔性体弹簧节点的位移被强制移动到预分析中获得的位移位置。相反,点b释放了初始压缩的弹簧,因此可以看到弹簧的恢复产生了81[N]的预紧力。
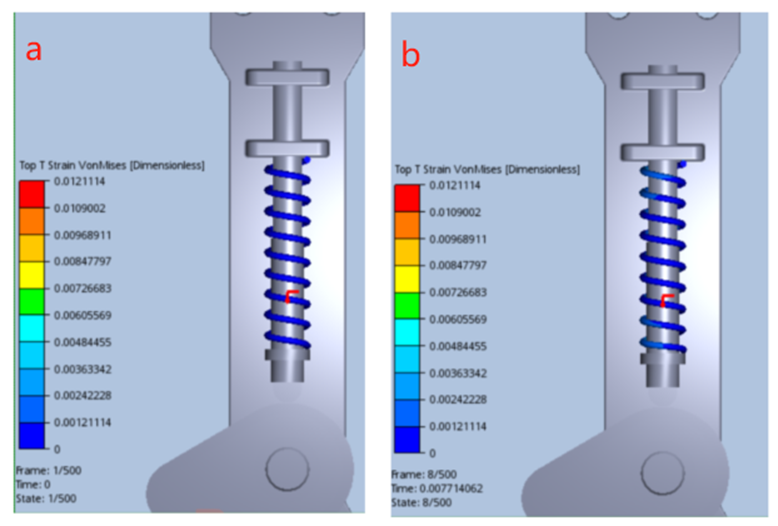
初始位置和平衡状态位置结果
在motion post 后处理器中,可以输出各部件的动力学响应结果,柔性体可以输出应力,应变,变形量等结果。在此模型中,可以查看弹簧端点接触的接触状态,接触力,摩擦力,接触穿透值等。下图为输出的部分结果
下图用标记箭头表示了与弹簧接触的法向接触力。根据弹簧的变形,还可以检查弹簧两端以及杆侧面与弹簧之间的接触(下图中的放大部分)的接触状态。也可以用图形显示每个时间点结果。
弹簧变形结果和接触面法向接触力
3
总结
Ansys Motion 作为一款专业的多体动力学仿真分析软件,在处理刚柔耦合问题,结构大变形,高度非线性接触等方面拥有强大的实力,motion采用隐式积分算法,提供不同类型的刚柔耦合接触模型,相比同类多体分析软件,求解更容易收敛。若您对Ansys Motion 以及多体动力学仿真分析感兴趣,欢迎来参加莎益博的培训课程,并与我们联系。
-
Adams多体动力学仿真解决方案全面解析2025-04-17 8213
-
凸轮轴位置传感器故障诊断 如何选择凸轮轴位置传感器2024-12-05 2981
-
凸轮轴位置传感器的作用 凸轮轴位置传感器坏了有什么影响2024-01-31 11194
-
发动机凸轮轴转速传感器故障问题讲解2020-09-08 3303
-
凸轮轴传感器坏了会有什么现象_凸轮轴传感器故障排除2020-06-02 12878
-
凸轮轴传感器坏了有什么现象_凸轮轴传感器的故障诊断与排除2020-05-31 5961
-
什么是凸轮轴位置传感器它的作用是什么2019-12-25 8040
-
关于汽车凸轮轴制造的分析和介绍2019-10-23 3735
-
凸轮轴位置传感器检测_凸轮轴位置传感器作用2019-09-30 11776
-
曲轴/凸轮轴位置传感器检测2018-10-31 1881
-
什么是顶置凸轮轴(OHC)2010-03-12 1181
-
基于多体系统动力学的空气悬架大客车平顺性试验仿真研究2009-12-02 4154
全部0条评论

快来发表一下你的评论吧 !
