

将成“标配”?自动驾驶域控制器深度解析
电子说
描述
随着电车的普及,ECU(电子控制单元)数量不断递增,目前市面上一辆汽车平均约采用25个ECU,而一些豪华高端车型已突破100个,在愈发复杂的线路中,如何保证数据处理和网络安全的最优化成为难题。博世、大陆等Tier 1企业认为,以域为单位的DCU (域控制器)集成化架构是最佳解决方案。
 自动驾驶系统架构
自动驾驶系统架构博世经典的五域分类将整车分为动力域、底盘域、座舱域/智能信息域、自动驾驶域和车身域。域控制器是汽车电子结构未来发展的趋势,其量产价格更低,且可以用更少的器件完成更多的功能。随着智能驾驶的到来,其所涉及的感知、控制、决策系统复杂性更高,与车身其它系统的信息交互、控制也越来越多。各方都希望其能变成一个模块化的、可移植性的、便于管理的汽车子系统。此时,专门定位于自动驾驶的域控制器系统就应运而生。
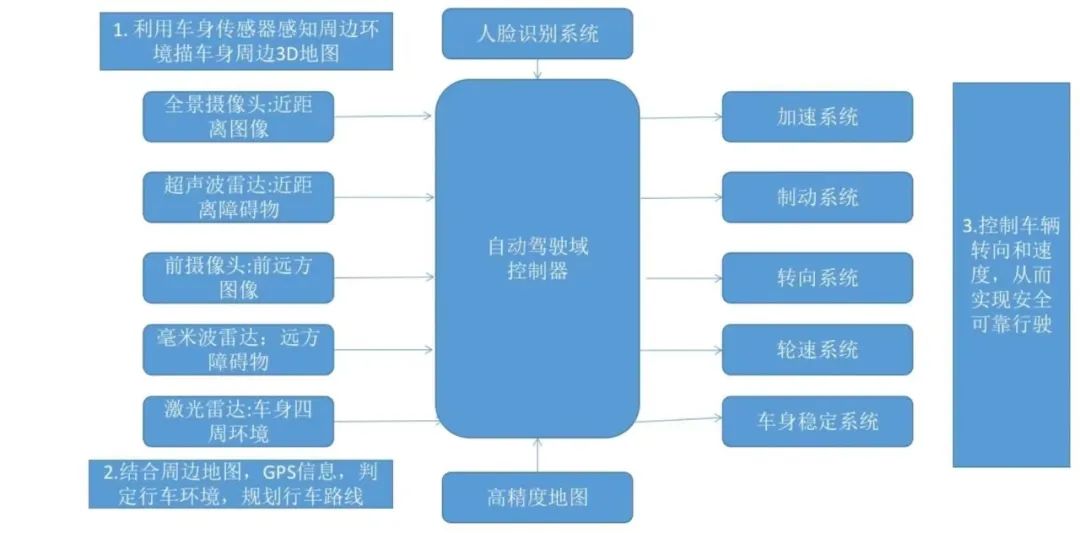
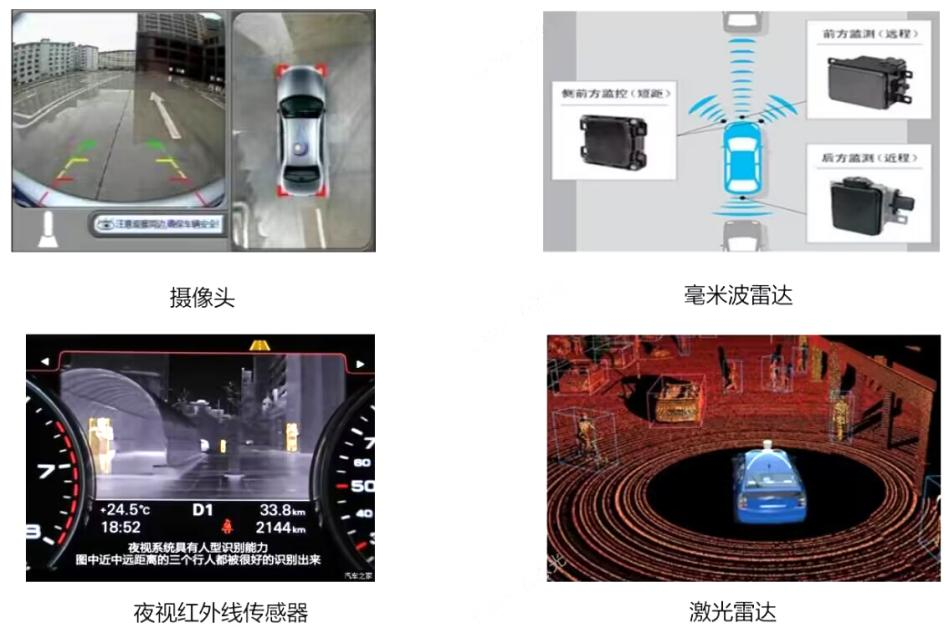
自动驾驶的域控制器相当于一个承上启下的中枢,其需要具备多传感器融合、定位、路径规划、决策控制、无线通讯、高速通讯的能力。还通常需要外接多个摄像头、毫米波雷达、激光雷达,以及IMU等设备,完成的功能包含图像识别、数据处理等。因为要完成大量运算,一般来说,自动驾驶域控制器需匹配一个核心运算力强的处理器,才能够为自动驾驶提供不同级别算力的支持。
不同的公司会因为不同的客户以及需求选择不同的方案,但中间也会有一些共性。比如在自动驾驶系统中,算力需求最高的当属图像识别部分,其次是多传感器的数据处理,以及融合决策。目前业内有NVIDIA、NXP等多个方案,融合了摄像头、高清雷达、激光雷达和超声波雷达等在内的传感器系统,以及域控制器处理系统等。
根据自动驾驶域控制器行业调研,目前自动驾驶域的开发模式多以车厂自研或主导+主机厂/核心软硬件方案供应商+代工生产的模式,从而产生了整车交付、自动驾驶解决方案商、运营商的三种角色定位和协作,现阶段车厂以长城,上汽等车厂为代表。
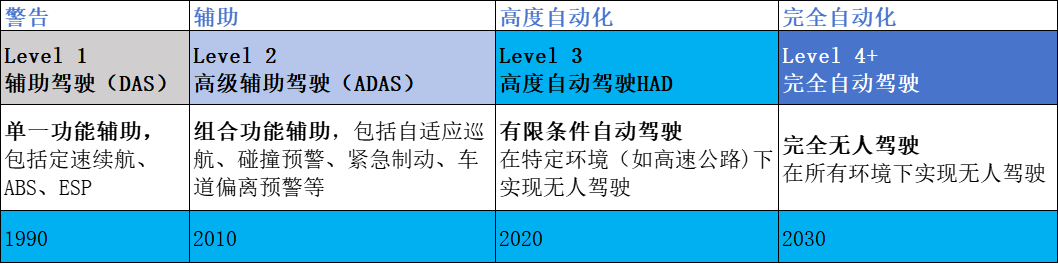 自动驾驶分级明细
自动驾驶分级明细硬件结构上,智能驾驶域控制器承载了车辆线控平台与多数量、多类型的外围传感器,内部以大量多并行计算作为主要特点,向外则需要对接大量不同类型的传感器接口。大批量、多类型的数据流入特征,使得自动驾驶域控制器的底层芯片应当是异构多核芯片。
在智能驾驶领域,唯样也可提供诸多相关元器件物料,以下列出供参考:
电感类:DC/DC电源功率电感,滤波电感等,单机用量一般在20pcs以上(TDK Corporation、TDK-EPCOS、CHILISIN、TAI-TECH)
串行解串:(ROHM)
晶振类:配合IC使用(TXC、SiTime)
Flash类:启动Flash,多以512M容量为主(GD、聚辰)
聚合物钽电容类:用于芯片端低压高容值要求的场合(KEMET)
阻容类:(TDK、YAGEO、KEMET、SAMSUNG、Panasonic、FH、太诱等)
陀螺仪:(TDK-InvenSense的IAM-20685产品)
电解电容:容值多在100~220uF之间(尼吉康、LELON)
分立半导体:(Infineon、LRC、Nexperia、AOS、JJW)
电源芯片:(MPS、TOREX、ROHM)
研究预测,到2050年之后,几乎所有汽车都将带有自动驾驶功能,自动驾驶将成为“标配”。自动驾驶技术的蓬勃发展,可让人们出行更加安全舒适、便捷。当然域控制器的发展,意味着今后会有更高的算力需求,未来对元器件的需求会十分庞大!
注:本文为原创文章,未经允许禁止转载!
审核编辑 黄宇
-
 jf_31241353
2023-11-18
0 回复 举报希望自动驾驶技术愈发成熟 收起回复
jf_31241353
2023-11-18
0 回复 举报希望自动驾驶技术愈发成熟 收起回复
-
 jf_47150376
2023-11-19
0 回复 举报自动驾驶发展好快,以后出行更方便了 收起回复
jf_47150376
2023-11-19
0 回复 举报自动驾驶发展好快,以后出行更方便了 收起回复
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8174
-
新能源车软件单元测试深度解析:自动驾驶系统视角2025-05-12 1392
-
自动驾驶真的会来吗?2016-07-21 14086
-
自动驾驶的到来2017-06-08 7305
-
转发:聊聊边缘计算在自动驾驶中的应用场景2020-07-21 4822
-
自动驾驶线控底盘VCU功能介绍2021-09-07 3002
-
智能驾驶域控制器的SoC芯片选型2022-08-11 3755
-
另辟蹊径 自动驾驶域控制器2018-06-12 8479
-
定位于自动驾驶的域控制器系统应运而生!2018-09-26 5944
-
域控制器在自动驾驶中的重要性2018-10-30 14233
-
自动驾驶控制器的实例2019-09-09 6843
-
阿丹能量:“自动驾驶汽车智能座舱域控制器”2020-11-13 4950
-
英恒科技正式发布CAELUS自动驾驶域控制器开源计划2021-05-28 3079
-
澳克诺领跑智驾域控制器,加速自动驾驶进入量产时代2022-09-14 1347
-
自动驾驶域控制器的来龙去脉2023-05-25 4607
全部0条评论

快来发表一下你的评论吧 !
