

机器人里程计数据可视化
描述
STM32端返回的x轴线速度、y轴线速度是相对于自身的机体坐标系的速度,而机器人的位置信息是相对于世界坐标系的位置,所以在对速度进行积分前, 要先将机体坐标系下的x轴线速度、y轴线速度转换到世界坐标系 ,如图:
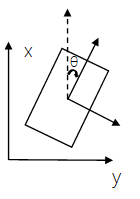
这个坐标变换可以通过一个简单的旋转矩阵来实现

其中θ就是机器人的偏航角。相应的程序如下:
/* 对速度进行积分得到位移 */
// 获取当前时间
current_time = ros::Time::now();
// 获取积分间隔
double dt = (current_time - last_time).toSec();
last_time = current_time;
// 将机体系速度转换到里程计坐标系
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
// 速度积分
x += delta_x;
y += delta_y;
在机器人中,一般使用四元数/旋转矩阵的形式来表示机器人的姿态,而不是欧拉角形式。所以需要将STM32返回的偏航角转换为四元数,程序如下:
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
以上就获取了完整的机器人里程计数据,接下来需要将里程计数据发布到ROS中。
nav_msgs::Odometry odom;
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
// 发布坐标变换
odom_broadcaster.sendTransform(odom_trans);
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
odom.child_frame_id = "base_link";
// 设置机器人的位置和姿态
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
// 设置机器人的速度
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
// 发布里程计消息
odom_pub.publish(odom);
运行后,打开PC上的Ubuntu,配置ip从而实现远程连接嵌入式处理器上的ROS系统,参照:ROS多机通信(https://blog.csdn.net/qq_42688495/article/details/115260247)
配置完成后,重新打开一个终端,输入:rviz,打开ROS的可视化工具,按照下图操作即可

可视化结果如下:

最后将该rviz配置保存至文件,点击File→Save Config As,将配置保存为xxxx.rviz。下次打开时,在命令行运行:rosrun rviz rviz -d xxxx.rviz即可。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人里程计数据的上传与接收2023-11-16 1394
-
ROS机器人导航调参手册2023-11-03 4413
-
介绍一种基于编码器合成里程计的方案2023-04-19 4116
-
如何去实现一种送餐机器人产品设计2021-11-11 1823
-
服务型智能扫地机器人的主要功能有哪些呢2021-11-08 2843
-
Python数据可视化2020-07-19 3415
-
如何设计液压式双足机器人运动数据可视化系统2020-03-19 1431
-
采用MATLAB设计下的可视化与控制2019-05-21 2344
-
关于机器人定位与建图,这些小技巧你懂吗2018-03-28 4528
-
使用Python可视化数据,机器人开发编程2018-03-15 10159
-
汽车里程计数项目PCB文件2017-02-27 1119
-
出租车行驶里程计数2016-10-22 5467
-
可视化机器人2016-07-31 4424
-
机器人焊装工位的可视化仿真研究2009-12-18 578
全部0条评论

快来发表一下你的评论吧 !
