

四足机器人足端接触检测完整代码
描述
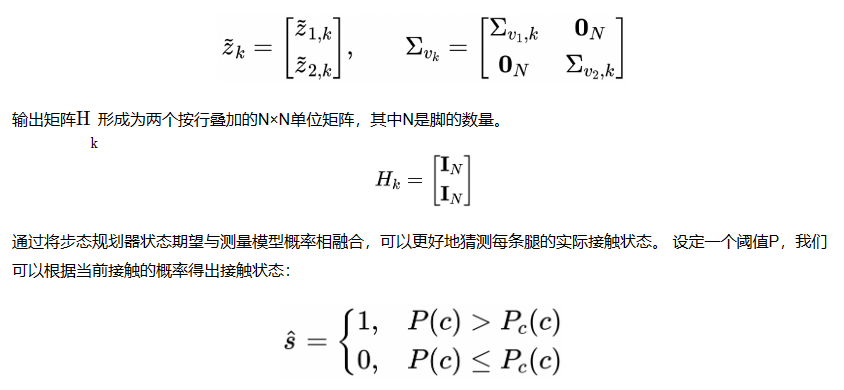
总体模型
将以上两组单独的测量结果叠加起来,形成卡尔曼滤波器中使用的观测向量。 同样,每个度量的协方差矩阵形成一个整体块 对角线协方差矩阵如下:
目前,我们使用的卡尔曼滤波用实现,这一融合过程其实可以通过贝叶斯定律的静态似然最大化得到。
然而,上述过程是一个嵌入在标准卡尔曼更新中的过程,大概是因为在机器人学中更容易实现。
完整代码
import math
import numpy as np
import matplotlib.pyplot as plt
# 设定周期为2
T = 2
# 根据相位计算当前接触状态
def get_contact_state(phi):
if phi < 0.5*T:
state = 1
else:
state = 0
return state
# 预测模型
def prediction_model(phi, state, params):
"""
Given the gait schedule and the current phase, φ, of a leg,
the gait scheduler provides an expected contact state s φ of
each leg
:param phi: phase
:param state: contact state
:param params: [mu, mu_bar, sigma, sigma_bar]
mu = [mu1, mu2] and so on
:return: the probability of contact
"""
mu0, mu1 = params[0]
mu0_bar, mu1_bar = params[1]
sigma0, sigma1 = params[2]
sigma0_bar, sigma1_bar = params[3]
a = math.erf((phi-mu0)/(sigma0*np.sqrt(2)))
+ math.erf((mu1-phi)/(sigma1*np.sqrt(2)))
b = 2+math.erf((mu0_bar-phi)/(sigma0_bar*np.sqrt(2)))
+ math.erf((phi-mu1_bar)/(sigma1_bar*np.sqrt(2)))
if state == 1:
prob = 0.5 * (state * a)
else:
prob = 0.5 * (state * b)
return prob
# 测量模型-离地高度
def ground_height(pz, params):
"""
The probability of contact given foot heigh
:param pz: ground height
:param params: [mu_z, sigma_z]
:return: The probability of contact
"""
mu_z, sigma_z = params
prob_ground_height = 0.5 * (1 + math.erf((mu_z-pz) / (sigma_z*np.sqrt(2))))
return prob_ground_height
# 测量模型-反作用力
def contact_force(f, params):
"""
the probability of contact given the estimated foot force
:param f: contact force
:param params: [mu_z, sigma_z]
:return: The probability of contact
"""
mu_f, sigma_f = params
prob_force = 0.5 * (1 + math.erf((f-mu_f) / (sigma_f*np.sqrt(2))))
return prob_force
# 概率分布绘图
def test_predict():
Mu = [0, 1]
Mu_bar = [0, 1]
Sigma = [0.025, 0.025]
Sigma_bar = [0.025, 0.025]
t = np.linspace(0, 0.999, 1000)
prediction_prob = []
prediction_prob2 = []
prediction_prob3 = []
for time in t:
phi = time % T
state = get_contact_state(phi)
p = prediction_model(phi, state, [Mu, Mu_bar, Sigma, Sigma_bar])
p2 = prediction_model(phi, state, [Mu, Mu_bar, [0.05, 0.05], [0.05, 0.05]])
p3 = prediction_model(phi, state, [Mu, Mu_bar, [0.01, 0.01], [0.01, 0.01]])
prediction_prob.append(p)
prediction_prob2.append(p2)
prediction_prob3.append(p3)
fig = plt.figure()
plt.subplot(211)
plt.title('contact phase')
plt.grid()
plt.plot(t, prediction_prob, label='$mu=[0, 1],sigma=[0.025, 0.025]$')
plt.plot(t, prediction_prob2, label='$mu=[0, 1],sigma=[0.05, 0.05]$')
plt.plot(t, prediction_prob3, label='$mu=[0, 1],sigma=[0.01, 0.01]$')
plt.legend()
plt.subplot(212)
plt.title('swing phase')
plt.grid()
plt.plot(t, 1-np.array(prediction_prob), label='$mu=[0, 1],sigma=[0.025, 0.025]$')
plt.plot(t, 1-np.array(prediction_prob2), label='$mu=[0, 1],sigma=[0.05, 0.05]$')
plt.plot(t, 1-np.array(prediction_prob3), label='$mu=[0, 1],sigma=[0.01, 0.01]$')
plt.legend()
fig.tight_layout()
plt.show()
def test_ground_height():
height = np.linspace(-0.3, 0.3, 1000)
ground_height_prob = []
ground_height_prob2 = []
ground_height_prob3 = []
params = [0, 0.025]
params2 = [0, 0.05]
params3 = [0, 0.1]
for h in height:
ground_height_prob.append(ground_height(h, params))
ground_height_prob2.append(ground_height(h, params2))
ground_height_prob3.append(ground_height(h, params3))
fig2 = plt.figure()
plt.plot(height, ground_height_prob, label='$mu=0,sigma=0.025$')
plt.plot(height, ground_height_prob2, label='$mu=0,sigma=0.05$')
plt.plot(height, ground_height_prob3, label='$mu=0,sigma=0.1$')
fig2.tight_layout()
plt.legend()
plt.grid()
plt.show()
def test_contact_force():
force = np.linspace(-50, 200, 1000)
contact_force_prob = []
contact_force_prob2 = []
contact_force_prob3 = []
params = [35, 10]
params2 = [35, 25]
params3 = [35, 50]
for f in force:
contact_force_prob.append(contact_force(f, params))
contact_force_prob2.append(contact_force(f, params2))
contact_force_prob3.append(contact_force(f, params3))
fig3 = plt.figure()
plt.plot(force, contact_force_prob, label='$mu=25,sigma=10$')
plt.plot(force, contact_force_prob2, label='$mu=25,sigma=25$')
plt.plot(force, contact_force_prob3, label='$mu=25,sigma=50$')
fig3.tight_layout()
plt.grid()
plt.legend()
plt.show()
# test_predict()
# test_ground_height()
test_contact_force()
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
四足机器人步态规划与接触状态2023-11-16 1544
-
四足机器人遍地开花,四足机器人的市场有多大2022-04-06 2535
-
如何完整的组装四足机器人?2021-09-24 3074
-
四足机器人的机构设计2021-09-15 1879
-
求六足机器人的图纸2019-03-26 3904
-
四足机器人2018-09-29 10488
-
四足仿生机器人2016-08-19 6258
-
什么是龙人四足机器人?2016-03-24 8792
-
【Embedded Pi申请】六足机器人的创新研发2015-11-25 3030
-
【OK210申请】四足轮式机器人2015-06-25 2283
-
stm32红外六足机器人2014-03-27 10227
-
双足机器人2013-11-25 3108
-
六足机器人2013-06-06 3544
-
四足步行机器人的弯道行走2012-08-12 2897
全部0条评论

快来发表一下你的评论吧 !
