

机械臂结构是什么样的
描述
该机械臂 6 个关节都是转动关节,前 3 个关节确定手腕参考点的位置,后 3个关节确定手腕的方位。和大多数工业机器人一样,后 3个关节轴线交于一点。因此将该点作为手腕的参考点,也选作为连杆坐标系{4},{5}和{6}的原点。如下图示。
对于机械臂, 通常将之看作“连杆结构” ,连杆是由关节组合而成。因此在分析机械臂的时候需要为机械手的每一连杆建立一个坐标系。
在分析连杆坐标系时, 通常需要在每个连杆上定义一个固连的坐标系来表明每个连杆与相邻连杆之间的相对位置关系。基于此原则,我们首先为各连杆和关节进行编号, 然后采用由下而上的顺序,基座为连杆 0,从基座起依次向上为连杆 1、连杆 2、 …, 关节i 连接连杆i-1和i 。
最终建立与连杆固连的坐标系OiXi Yi Zi ,如下所示:
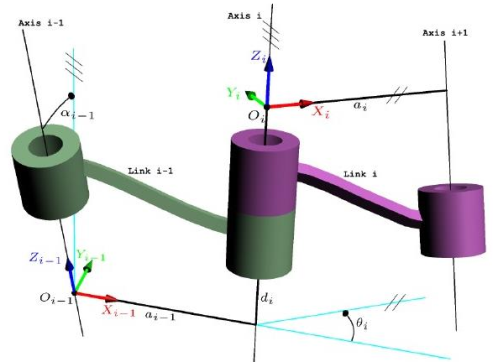
根据所设定的连杆坐标系, 相应的连杆参数可定义如下:
(1) 绕 xi-1轴旋转αi-1角, 可使 zi-1轴与 zii轴同一平面;
(2)沿 xii-1轴平移距离αi-1, 可使 zi-1轴与 zi 轴同一高度上;
(3)绕 zi 轴旋转θi 角, 可使 xi-1轴与 xi 轴同一直线上;
(4)沿 zi 轴平移距离 di, 可使连杆i -1的坐标系移动到其原点与连杆i 坐标系原点重合。
可根据改进的 D-H 示法, 对机械臂建立坐标系。 在改进 D-H 坐标系中, 坐标系{0}和{1}一般重合, O1 为轴 1 和轴 2 公法线在轴
1 上的交点,此时关节 1 和关节 2 在 z 轴向上的偏置没有体现出来, 但对于整个机械臂各关节的相对运动来说并没有影响。
选取第一关节坐标系与基坐标系重合。根据机械臂的结构和连杆坐标系,可得出其连杆参数和关节变量,如下表示:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
刚性机械臂的动力学建模2023-11-17 2168
-
人臂控制机械臂开源2023-01-31 936
-
如何选择一款六轴机械臂作为入门(教育或者研究)机械臂?2022-12-09 3217
-
什么是小机械臂?问天实验舱小机械臂在轨测试流程2022-08-29 1372
-
机械臂的控制学习2022-02-23 2632
-
工业机械臂的相关资料推荐2021-11-29 1848
-
工业机械臂2021-11-19 1635
-
STM32F1的中断结构是什么样的?2021-11-17 822
-
众为兴SCARA四轴机械臂编程概述2021-07-20 1485
-
关于机械臂的设计问题2019-12-16 3103
-
机械手内部是什么样的吗?部位结构种类分析2019-07-11 14983
-
使用moveit控制真实机械臂的方法2019-05-21 6721
-
机械臂问题2018-01-18 9546
-
舵机怎么调机械臂2016-07-30 5166
全部0条评论

快来发表一下你的评论吧 !
