

机械臂五次多项式插值法介绍
描述
五次多项式插值法
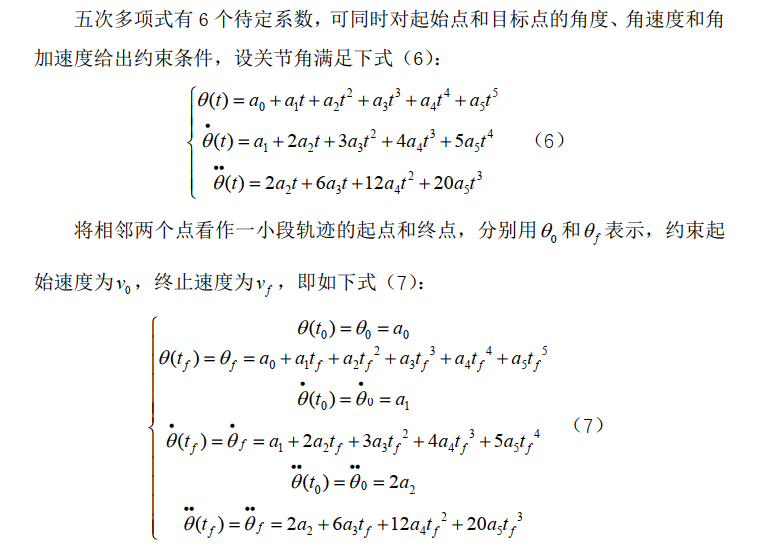
五次多项式有6个待定系数,可同时对起始点和目标点的角度、角速度和角加速度给出约束条件。
数学推导

MATLAB代码
%五次多项式插值法
clear;
clc;
q_array=[0,50,150,100,40];%指定起止位置
t_array=[0,3,6,12,14];%指定起止时间
v_array=[0,10,20,-15,0];%指定起止速度
a_array=[0,20,30,-20,0];%指定起止加速度
t=[t_array(1)];q=[q_array(1)];v=[v_array(1)];a=[a_array(1)];%初始状态
for i=1:1:length(q_array)-1%每一段规划的时间
T=t_array(i+1)-t_array(i);
a0=q_array(i);
a1=v_array(i);
a2=a_array(i)/2;
a3=(20*q_array(i+1)-20*q_array(i)-(8*v_array(i+1)+12*v_array(i))*T-(3*a_array(i)-a_array(i+1))*T^2)/(2*T^3);
a4=(30*q_array(i)-30*q_array(i+1)+(14*v_array(i+1)+16*v_array(i))*T+(3*a_array(i)-2*a_array(i+1))*T^2)/(2*T^4);
a5=(12*q_array(i+1)-12*q_array(i)-(6*v_array(i+1)+6*v_array(i))*T-(a_array(i)-a_array(i+1))*T^2)/(2*T^5);%计算五次多项式系数
ti=t_array(i):0.001:t_array(i+1);
qi=a0+a1*(ti-t_array(i))+a2*(ti-t_array(i)).^2+a3*(ti-t_array(i)).^3+a4*(ti-t_array(i)).^4+a5*(ti-t_array(i)).^5;
vi=a1+2*a2*(ti-t_array(i))+3*a3*(ti-t_array(i)).^2+4*a4*(ti-t_array(i)).^3+5*a5*(ti-t_array(i)).^4;
ai=2*a2+6*a3*(ti-t_array(i))+12*a4*(ti-t_array(i)).^2+20*a5*(ti-t_array(i)).^3;
t=[t,ti(2:end)];q=[q,qi(2:end)];v=[v,vi(2:end)];a=[a,ai(2:end)];
end
subplot(3,1,1),plot(t,q,'r'),xlabel('t/s'),ylabel('p/m');hold on; plot(t_array,q_array,'o','color','r'),grid on;
subplot(3,1,2),plot(t,v,'b'),xlabel('t/s'),ylabel('v/(m/s)');hold on;plot(t_array,v_array,'*','color','r'),grid on;
subplot(3,1,3),plot(t,a,'g'),xlabel('t/s'),ylabel('a/(m/s^2)');hold on;plot(t_array,a_array,'^','color','r'),grid on;
% 指定文件夹保存图片
filepath=pwd; %保存当前工作目录
cd('C:UsersAdministratorDesktoppic') %把当前工作目录切换到图片存储文件夹
print(gcf,'-djpeg','C:UsersAdministratorDesktoppicwu.jpeg'); %将图片保存为jpg格式,
cd(filepath) %切回原工作目录

两种插值法的效果对比
相对于三次多项式插值, 五次多项式插值法所得到的轨迹加速度也是平滑的曲线,并没有出现跳变的情况。
在机器人系统中,关节角加速度出现跳变现象意味着关节的电机会受到冲击, 因此为保证电机平稳运行,角加速度要求平滑连续。
虽然三次多项式插值法的计算量和较之更小,但对于离线规划而言,该时间成本可以忽略,因此从规划的轨迹平稳度而言,五次多项式插值法更佳。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
六自由度机械臂三次多项式插值法2023-11-17 2918
-
多项式回归的五个步骤2019-05-20 1612
-
6自由度机械臂点到点5次多项式插值轨迹规划2019-03-13 5662
-
想用labview进行公式计算,请问是怎么实现上面是常数下面是多项式这种形式的多项式的运算?2018-05-21 6797
-
多项式插值算法框架2018-01-05 905
-
局部多项式的方法对图像进行插值2017-12-20 1166
-
正交多项式拟合-matlab2017-11-27 8214
-
自适应细分二次多项式响应面算法_罗小玲2017-03-19 744
-
基于多项式插值函数的翼型参数化设计方法2016-12-29 659
-
三次多项式型段内加减速控制新方法2016-05-03 711
-
基于拉格朗日插值多项式的光伏电池I-V特性建模方法2016-01-04 842
-
多项式线性拟合2013-04-18 15531
-
MATLAB多项式函数命令2009-09-22 4464
全部0条评论

快来发表一下你的评论吧 !
