

图文详解并联机器人发展历程及分类、应用领域
机器人
描述
并联机器人早在上世纪的90年代就已崭露头角,现在更是工业机器人的新生代力量,广泛应用在医药、电子等轻工业,本文就为大家介绍它的分类、应用领域等相关知识。
发展历程
国外 1931年,Gwinnett在其专利中提出了一种基于球面并联机构的娱乐装置;
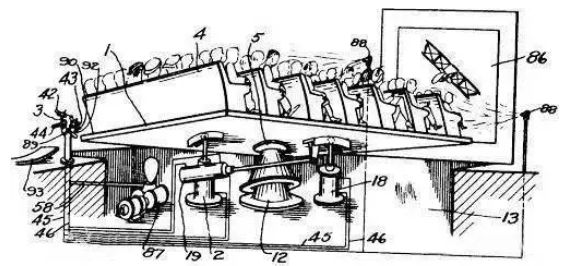
并联娱乐装置 1940年,Pollard在其专利中提出了一种空间工业并联机构,用于汽车的喷漆;
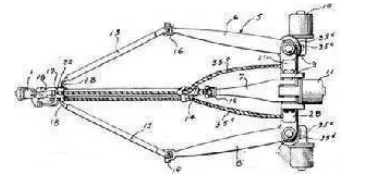
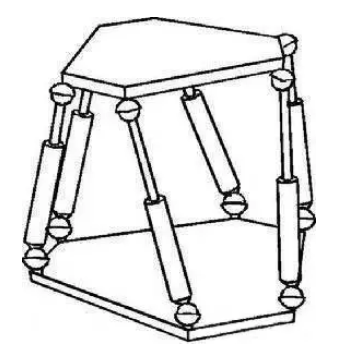
Pollard的并联机构 1962年,Gough发明了一种基于并联机构的六自由度轮胎检测装置; 并联机器人 1965年,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,这种机构也是目前应用最广的并联机构,被称为Gough-Stewart机构或Stewart机构。
Gough- Stewart机构 1978年,Mccallino等人首次设计出了在小型计算机控制下,在精密装置中完成校准任务的并联机器人,真正拉开了并联机器人研究的序幕。 80年代末期到90年代以来,并联机器人才引起广泛注意。
国内 1991年,燕山大学黄真教授在研制出我国第一台六自由度并联机器人样机; 1997年,清华大学和天津大学合作研制的大型镗床类并联样机VAMTIY; 1998年,东北大学研制了五轴联动三杆并联机床DSX5-70。 1999年,天津大学和天津第一机床总厂合作研制了三坐标并联机床商品化样机LINAPOD,哈尔滨工业大学也研制了一台六自由度并联机床样机。 我国对并联机器人的研究起步较晚,技术与国外相比还存在着差距。在并联机器人不过,经过近几年的发展,国产并联机器人应用水平日益提高,逐渐受到企业的认可与使用。
并联机器人特点
并联机构(Parallel Mechanism,简称PM),可以定义为动平台和静平台(定平台)通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。 其特点有:结构紧凑,刚度高,承载能力大;无累计误差,精度高;占用空间小;速度快,运动性能佳,部件磨损小,寿命长。

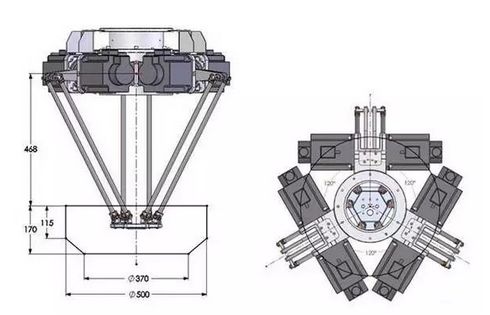
并联机器人结构图
并联构型分类
在并联机器人机构体系中,有多种机构种类的划分,按照自由度划分,分为: 2 自由度并联机构 在并联机构领域,2自由度并联机构的自由度最少,分为平面结构和球面结构两大类,主要适用于平面或球面定位,应用领域大。 天津大学拥有独立知识产权的二自由度并联机构Diamond机器人目前已规模化应用在电子、医药、食品等工业领域中,为包装、移载等物流环节提供了高效、高质的保障。 3 自由度并联机构 3 自由度并联机构种类较多,形式较复杂,一般有以下形式:平面3自由度并联机构,如3-RRR 机构,它们具有2个移动和一个转动;球面3自由度并联机构,如3-UPS-1-S 球面机构,该类机构的运动学正反解都很简单,是一种应用很广泛的3维移动空间机构;空间3自由度并联机构,这类机构属于欠秩机构,在工作空间内不同的点其运动形式不同是其最显著的特点。还有一类是增加辅助杆件和运动副的空间机构。 4 自由度并联机构 4 自由度并联机构大多不是完全并联机构,不过可以扩大应用范围,在三自由度并联机构的基础上增加一个转动自由度,形成四自由度并联机器人。 5 自由度并联机构 国际上一直认为不存在全对称五自由度并联机器人机构。不过,非对称五自由度并联机器人机构比较容易综合。Lee和Park在1999年提出一种结构复杂的双层五自由度并联机构;Jin等在2001年综合出具有三个移动自由度和两个转动自由度的非对称五自由度并联机构。 6 自由度并联机构
6 自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得最多的并联机构,广泛应用在飞行模拟器、6维力与力矩传感器和并联机床等领域。但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、动力学模型的建立以及并联机床的精度标定等。
应用领域
并联机构多用于需要高刚度、高精度、高速度,无需大空间的场合,具体应用包括: 1、食品、医药、电子、化工行业的分拣、搬运、装箱等。 2、模拟运动 如飞行员三维空间训练模拟器;工程模拟器,如船用摇摆台等;检测产品在模拟的反复冲击、振动下的运行可靠性;娱乐运动模拟台。 波音737-400飞行模拟器 3、并联机床 4、对接动作 航天器对接口 如宇宙飞船的空间对接;汽车装配线上的车轮安装;医院中的假肢接骨。 5、承载运动 如大扭矩螺栓紧固;短距离重物搬运。 6、金属切削加工 可应用于各类铣床、磨床钻床或点焊机、切割机。 7、可用于测量机,用来作为其他机构的误差补偿器 8、微操作机器人 用于微动机构或者微型机构 9、机器人关节 可用作机器人的关节,爬行机构、食品、医药包装和移载机械手等。
并联机器人在操作中具有重量轻、刚度高、速度快等等许多优势,应用于许多不同领域,因此,了解一些它的相关知识,相信会对您有所帮助。
编辑:黄飞
-
并联机器人快速准确拾取物体2016-09-14 20518
-
并联机器人的特点及其运动模拟器等相关设计的介绍2017-10-17 1729
-
并联机器人机构特点及其设计与分析2017-10-21 1942
-
外资机器人企业进军国内市场,国产并联机器人将率先与之展开较量2018-08-29 1068
-
拖动示教测试在并联机器人应用领域实现零突破2018-12-07 1831
-
并联机器人2019年或将迎来从量到质的飞跃性发展2019-01-24 1589
-
2019,并联机器人增速几何?2019-03-08 1193
-
并联机器人的实际应用都在哪些领域中2019-10-28 6671
-
勃肯特推出并联机器人 进入了结构全新升级阶断2019-11-14 1366
-
并联机器人的历史应用及发展资料详细说明2020-03-11 1443
-
2020年并联机器人产业发展蓝皮书发布2020-09-27 3201
-
ABB完成对领先的并联机器人提供商CodianRobotics的收购2020-10-11 2913
-
并联机器人控制2021-04-20 1113
-
机器人的应用领域及主要分类2021-10-02 45861
-
并联机器人和串联机器人的区别是什么?2024-01-26 6707
全部0条评论

快来发表一下你的评论吧 !
