

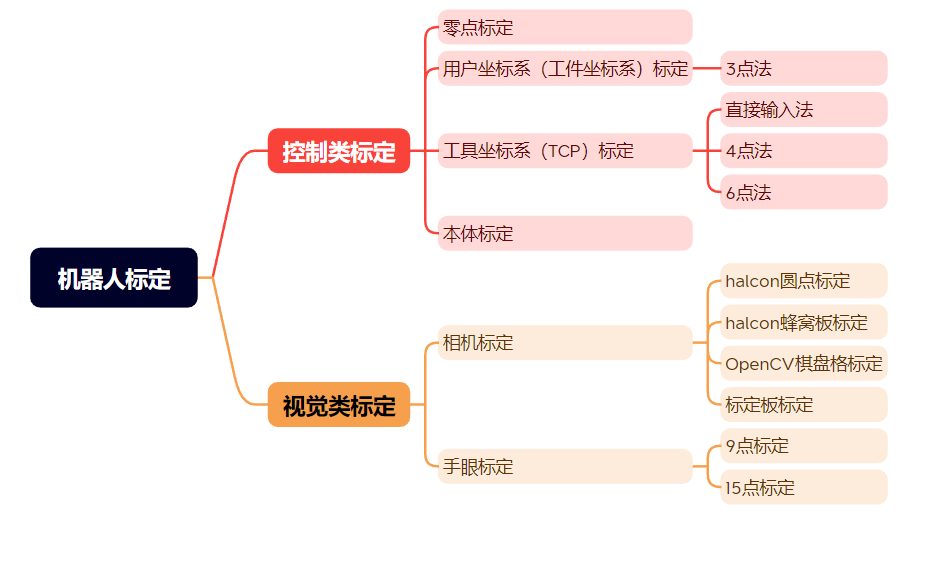
机器人的标定是什么 机器人标定方法有几种
机器人
描述
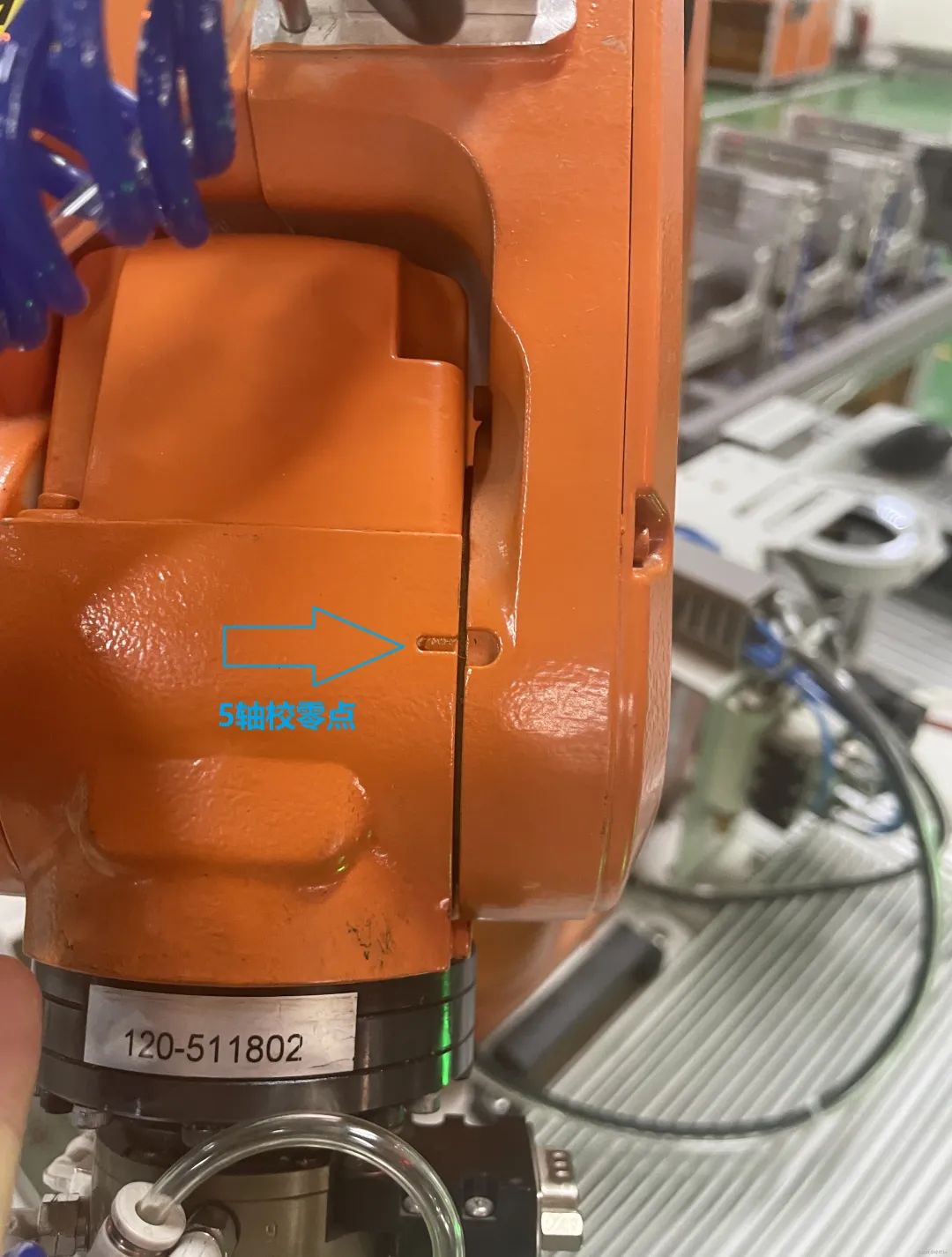
01零点标定

为什么要零点标定
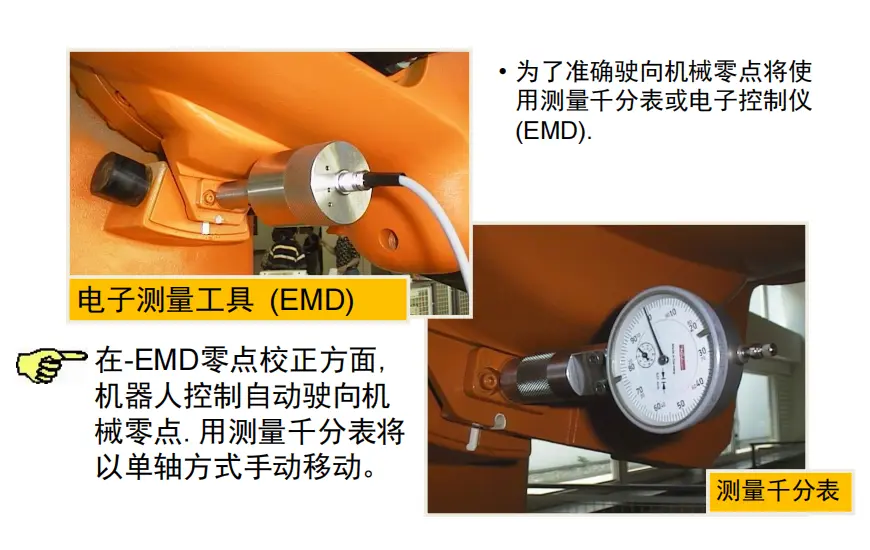
在机器人零点校正时,轴被移到一个定义的机械位置,即所谓机械零位。如果机器人在这机械零位, 那么每个轴的绝对传感器值被存储。零点标定目的是使机器人各轴的轴角度与连接在各轴电机上的绝对值编码器的脉冲计数值对应起来的操作。具体而言,是为了求取零度姿势的脉冲计数值的操作。
机器人通过闭环伺服系统来控制机器人各运动轴。控制器输出控制命令来驱动每一个马达。而马达上装配的称为串行脉冲编码器的反馈装置将把信号反馈给控制器。在机器人操作过程中,控制器不断的分析反馈信号,修改命令信号,从而在整个过程中一直保持正确的位置和速度。控制器必须“知晓”每个轴的位置,以使机器人能够准确地按原定位置移动。控制器通过比较操作过程中读取的串行脉冲编码器的信号与机器人上已知的机械参考点信号的不同来达到这一目的。零点标定过程就是读取已知的机械参考 点的串行脉冲编码器信号的过程。这样的零点标定数据与其他用户数据一起保存在控制器备份中,并在未连接电源时由电池能源保持数据。当控制器在正常条件下关闭电源时, 每个串行脉冲编码器的当前数据将保持在脉冲编码器中,由机器人上的后备电池提供能源。当控制器重新上电时,控制器将请求从脉冲编码器读取数据。当控制器收到脉冲编码器的读取数据时,伺服系统才可以正确操作。这一过程可以称为校准过程。校准在每次控制器开启时自动进行。
正常情况下,没有必要做零点标定,但是只要发生以下情况之一,就必须执行零点标定:
更换电机
更换脉冲编码器
更换减速机
更换电缆
机构部的脉冲计数备用电池耗尽
机器人的机械部分因为撞击导致脉冲记数不能指示轴的角度
02
用户坐标系(工件坐标系)标定
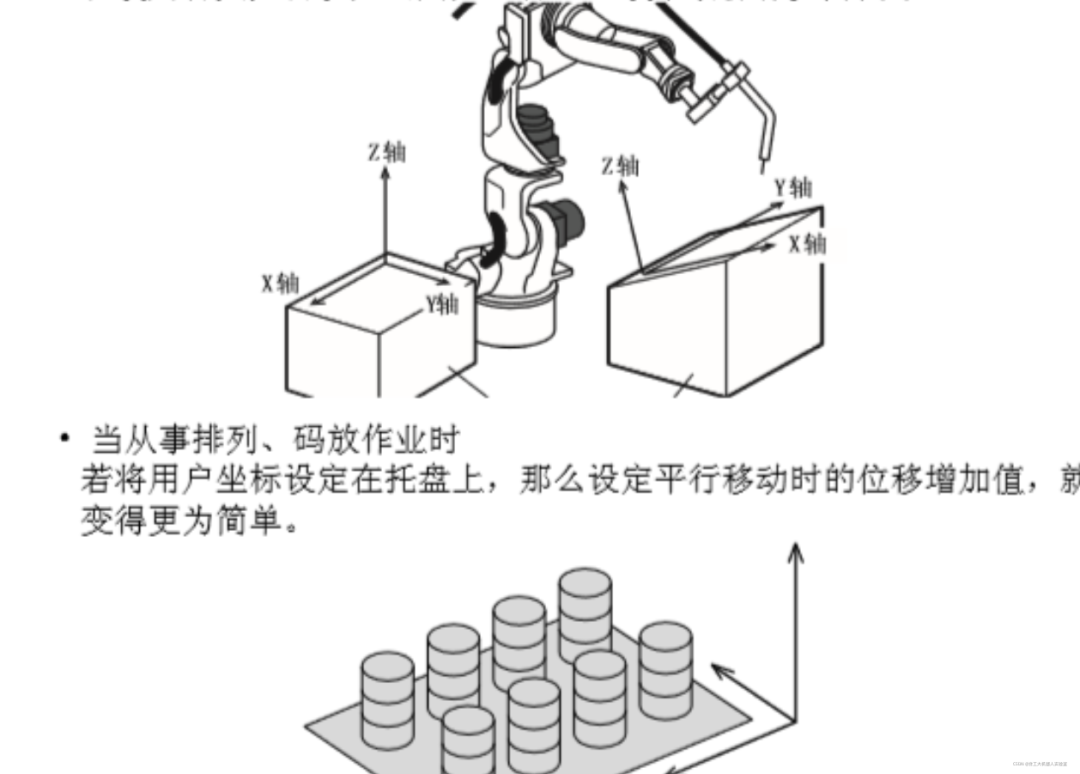
定义
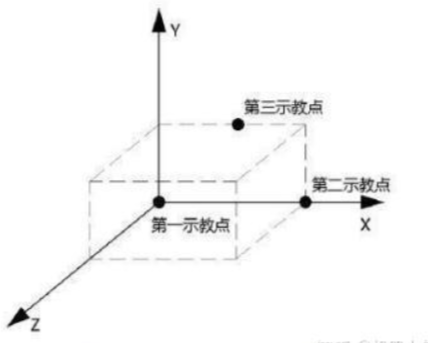
用户坐标系定义在工件上,在机器人动作允许范围内的任意位置,设定任意角度的X、Y、Z 轴,原点位于机器人抓取的工件上,坐标系的方向根据客户需要任意定义。用户坐标可以设置多个。
标定方法
用户坐标标定方法相对比较简单。一般通过示教3个示教点实现,第一个示教点是用户坐标系的原点;第二个示教点在X轴上,第一个示教点到第二个示教点的连线是X轴,所指方向为X正方向;第三个示教点在Y轴的正方向区域内。Z轴由右手手法则确定。
03
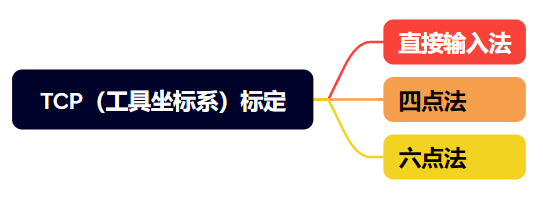
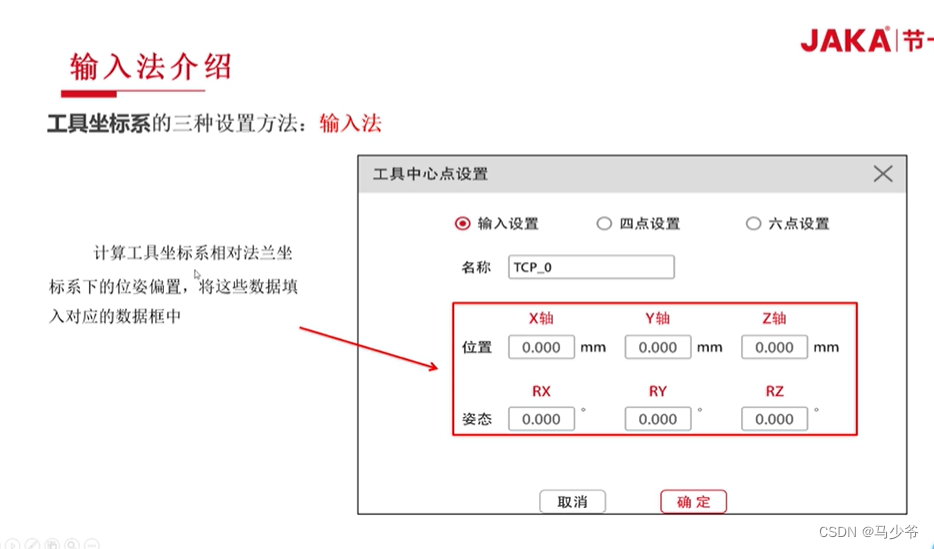
工具坐标系(TCP)标定
目的
机器人工具坐标系标定就是确定工具坐标系相对于末端连杆坐标系的变换矩阵。
工业机器人在出厂时有一个默认的工具坐标系tool0,该工具坐标系位于机器人第六轴法兰盘的中心,是由基坐标系通过机器人正解得到的一个旋转偏移矩阵。实际工作中,默认的工具坐标系tool0并不能有效满足实际工作要求,所以要根据末端执行机构的种类和特点,重新建立一个或多个工具坐标系。为机器人建立新的工具坐标系,可以方便操作者灵活地调整机器人末端执行机构的姿态,更加精确地控制机器人的运动轨迹。
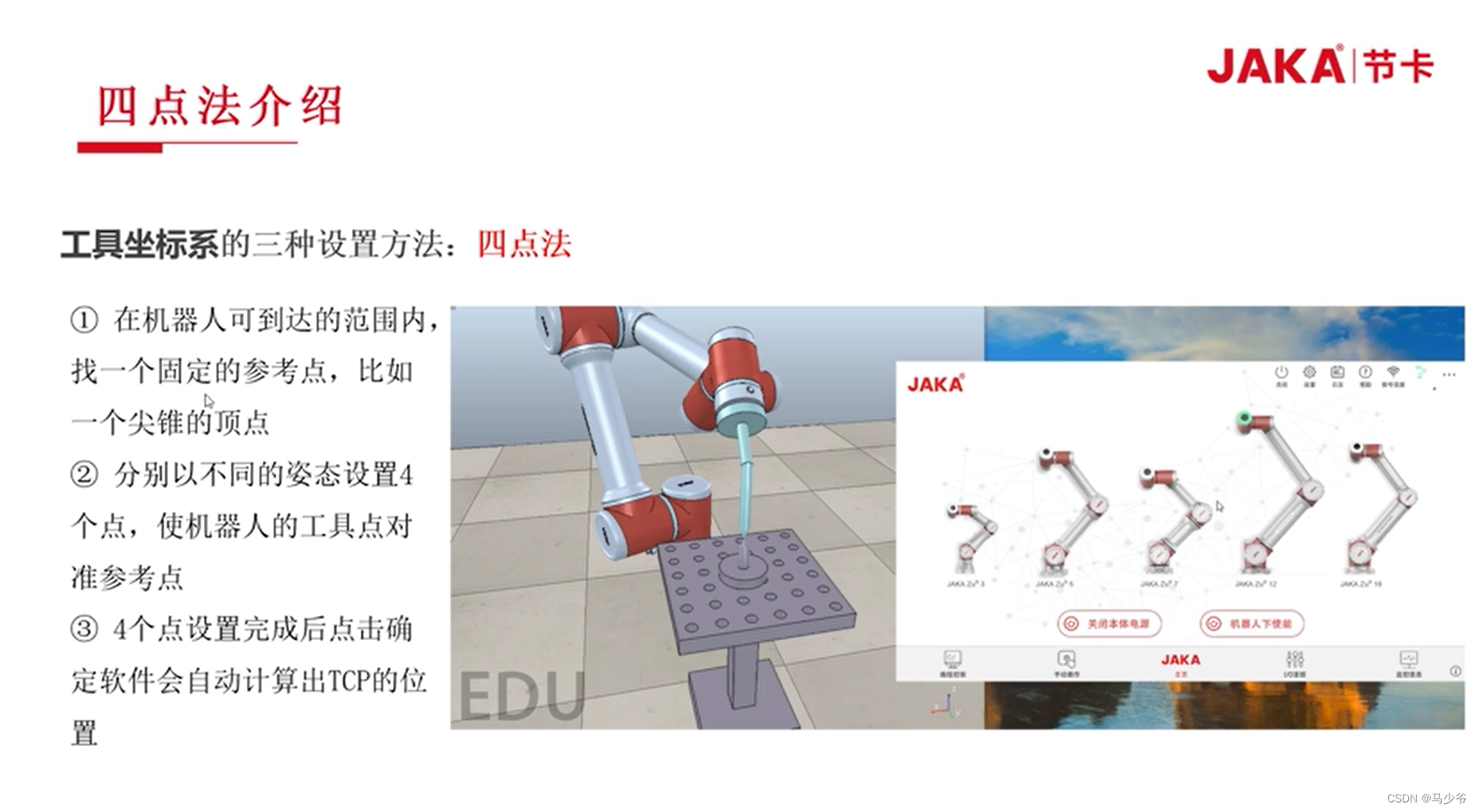
TCP位置标定
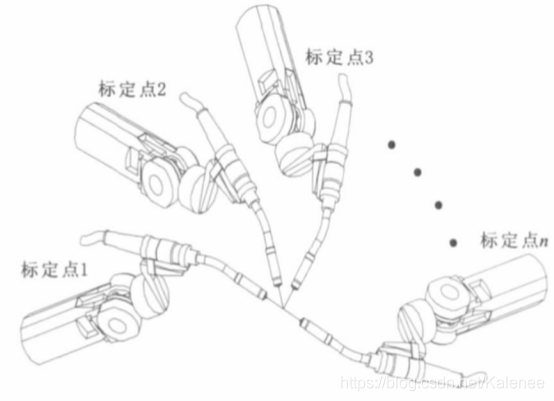
标定步骤
1、控制机械臂移动工具从不同方位触碰空间中某个固定点,记录n组数据(n ⩾ 3);
2、计算获得工具末端点相对机械臂末端点的位置变换;
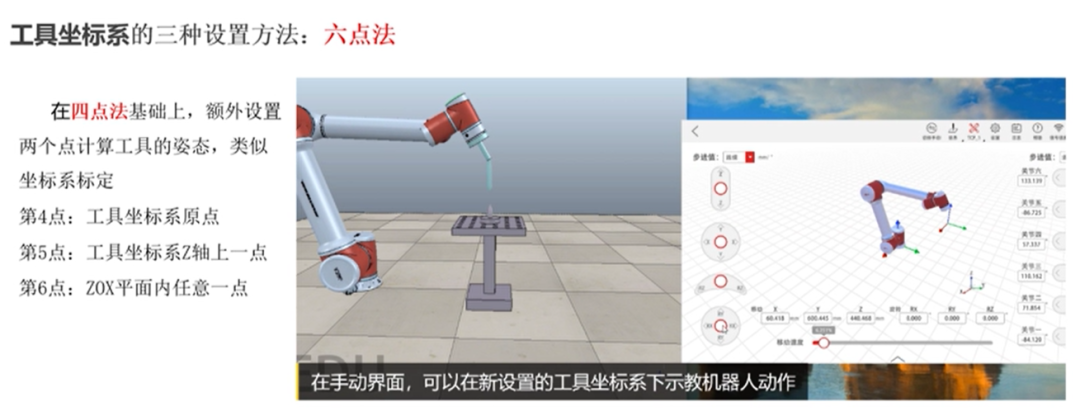
TCF姿态标定
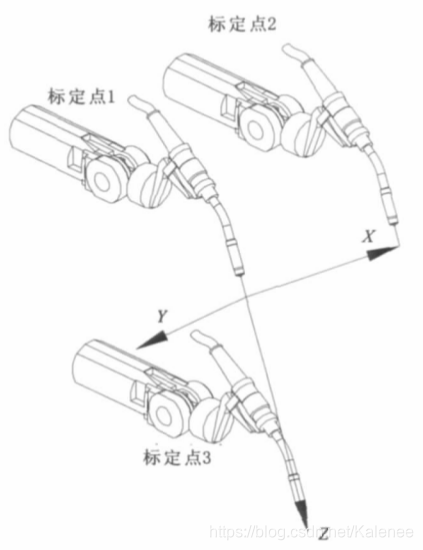
标定步骤
1、完成位置标定;
2、控制工具末端点分别沿x方向和z方向移动一定距离,工具末端点只在该方向上有移动,其它方向上无位移,同时固定初始姿态保持不变。实际操作上可以设置三个固定点(三个固定点满足上述要求,点2和点3相对点1只有一个方向上的移动),使工具末端点分别触碰这三个点然后记录下机械臂末端位姿;
3、计算获得工具坐标系相对机械臂末端坐标系的姿态变换;

标定方法

04
本体标定
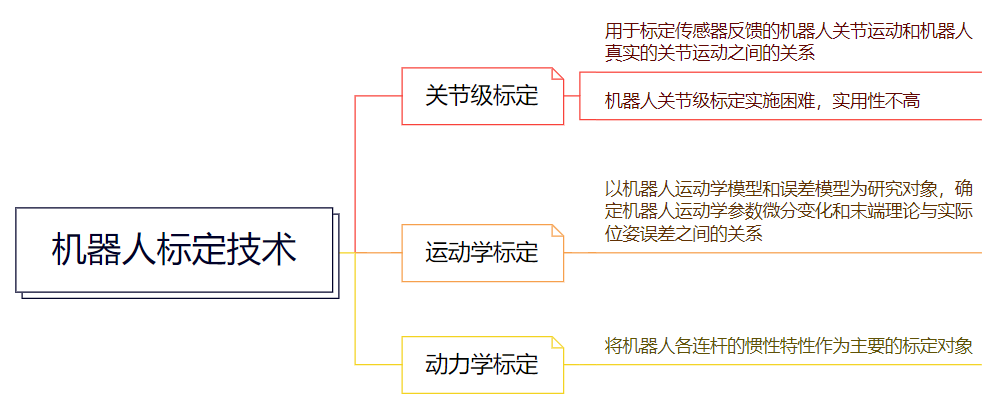
见原文: 机器人标定技术研究现状
05
相机标定
相机标定不同于手眼标定,通常指的是相机畸变标定。
镜头有畸变,也就是说照出的图像与实际不符产生了形变。即使工业镜头也是有千分之几的畸变率的。
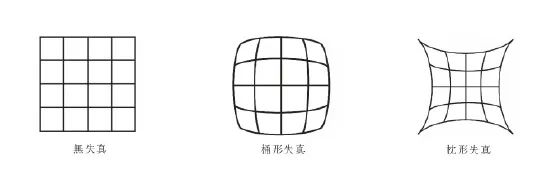
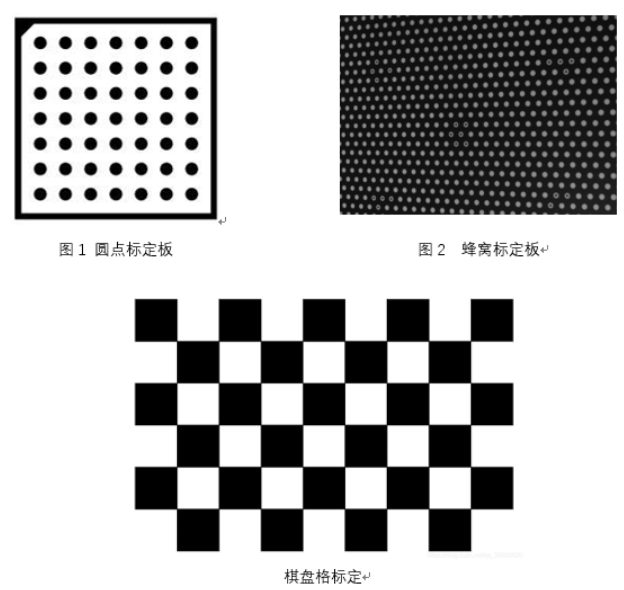
在一个CCD相机中,存在像素坐标系,图像坐标系,世界坐标系等。由于光学成像的问题,相机存在枕型畸变和桶型畸变,相机的像素尺寸与实际物体尺寸并不是比例关系。而且相机的安装位置与实际的成像平面存在位姿偏差关系。通过相机标定可以将像素坐标系转化到世界坐标系,解算出相机的内参(相机本身的参数,如焦距,X,Y方向上的像元大小),外参(相机与实际平面之间的位姿关系)。在halcon中,提供了圆点标定板和蜂窝标定板两种,通过标定助手可以实现高精度标定,输出相机内外参。
06
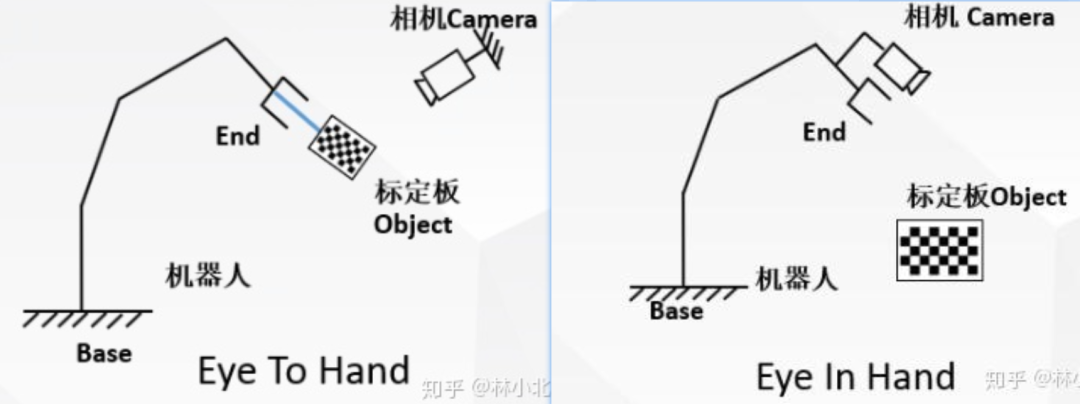
手眼标定
手眼标定的实质是建立视觉像素坐标系与机器人或轴组基坐标系之间的关系。通过手眼标定,可以将工业相机看到的物体像素坐标转换到机器人坐标上,这样,机器人会根据转换后的坐标完成抓取等动作。在算法层面,AX=B,A代表像素坐标系,通常指的是相机看到的像素坐标(Row,Column),B代表的是机器人基坐标系下的坐标(RobotsX,RobotsY)。通过已知的像素坐标矩阵A和机器人坐标矩阵B,便可以求出X,接下来相机定位到的像素坐标乘以X矩阵,便可以得到机器人下的坐标,从而实现引导机器人抓取动作。值得注意的是,手眼标定不仅仅可以完成对平面物体的抓取,大量的机器人空间抓取工作还需要考虑位姿(位置和姿态)的变化。所以,3D视觉会求解出像素坐标下的物体三维位姿信息,也可以通过这个公式求解出机器人六自由度下的坐标值。
编辑:黄飞
-
详解机器人手眼标定MATLAB及C++实现2022-11-25 4744
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
NI VISION 与机器人做引导2018-04-09 4850
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4130
-
工业机器人视觉装配实训平台实验2021-07-01 2116
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5452
-
机器人是什么?2022-03-31 22309
-
零点标定的情况与机器人零点标定方法2017-09-19 3375
-
视觉导向机器人使用LabVIEW坐标标定方法2017-11-17 14223
-
Gibbon机器人快速标定系统介绍2018-07-05 3094
-
机器人基坐标系标定方法研究2018-03-07 1068
-
机器人与视觉标定理论是什么?2021-05-27 5058
-
机器人视觉零点标定操作的具体操作流程2023-02-16 5780
-
常见的机器人视觉伺服中的标定技术有哪些2023-08-04 1474
-
机器人标定技术的分类及三个步骤2023-09-15 4249
全部0条评论

快来发表一下你的评论吧 !
