

汽车制动系统的基本功能和工作原理
电子说
描述
01汽车制动系统基本功能
传统汽车的底盘主要由传动系、行驶系、转向系和制动系四部分组成,除了支撑汽车的发动机及其他零部件外,还具有接收驾驶员的操作指令,使汽车实现行驶、转向以及制动等功能, 是燃油车的重要组成部分。其中,传动系、行驶系、转向系以及制动系四部分相互连通、相辅相成,共同构成了汽车底盘,也构成了线控底盘技术的基础。
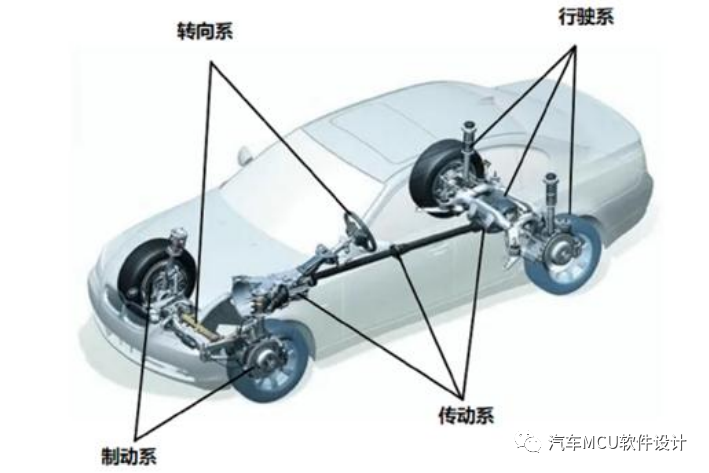
图 1 传统汽车底盘机械结构
制动系主要由制动器、助力器、制动片等部件组成,主要功能是降低处于行驶过程中汽车的速度或使其停止,大致可分为行车制动和驻车制动。其中行车制动主要用于行车时降低行车速度或使汽车停止,驻车制动主要用于停车后防止汽车发生滑动。
制动技术可分为气压制动和液压制动,通用和福特分别于1934年和1939年采用了液压制动技术。后续历经多次迭代,到20世纪50年代,液压助力制动器已开始规模化量产上车,成为后机械式制动时代的主流制动方案。以一辆配备液压制动系统的传统乘用车为例:其制动系统主要包括制动踏板、真空助力器、制动液、制动油管、制动主缸、制动轮缸以及车轮制动器,当驾驶员踩住制动踏板时发生作用力,推动真空助力器的后腔进气控制阀打开,随即后腔充气使压力大于前腔形成压力差,从而将制动力放大形成对制动主缸推杆向前的推力,推动制动主缸内的液体进入制动管路形成车轮制动力,由此车轮制动器得以执行制动操作。
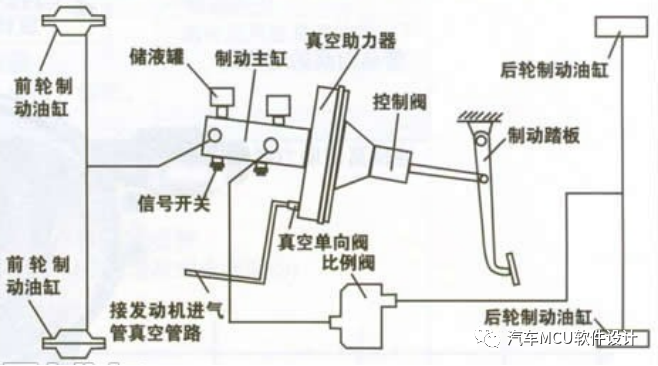
图 2 真空助力器伺服制动原理
此外,随着汽车电子技术的发展,人们以液压制动系统为基础,增加了很多制动辅助系统,例如制动防抱死系统(ABS、1978年博世首发)、牵引力控制系统(TCS、1986 年博世首发)、稳定性控制系统(VDC、1992年博世首发,并推出同时集成 ABS/TCS/VDC 功能的划时代产品ESP)、自动驻车功能(AUTOHOLD)、陡坡缓降控制(HDC)、刹车优先系统(BOS)等,均是在原液压制动系统中增设一套液压控制装置,控制制动管路中制动液的增减,以控制制动压力的变化适用于不同场景。
在新能源汽车时代,由于车内失去了由发动机产生的真空压力来源,倒逼制动系统再次改造升级。目前针对此问题,提出了智能刹车系统(IBS)的概念,主要有两种解决方案,分别为电子真空泵(EVP)方案和线控制动方案(EMB/EHB):
(1)EVP方案:在原有真空助力液压制动系统中增加EVP(Electronics Vacum Pump,电子真空泵)、PTS(Pedal Travel Sensor,踏板行程传感器)和气压传感器。
EVP的作用是为真空助力器提供动力源,因为电驱动乘用车没有传统的发动机,无法为真空助力器提供真空度,真空助力器无真空下无法提供制动助力。该系统通常还会带一个真空罐,用于存储一定容积的真空,使系统的真空度更稳定,同时降低EVP的启动频次,增长EVP使用寿命。PTS主要是为了给电机控制器提供制动信号,有效利用制动空行程进行能量回收,提高能量回收率。
(2)线控制动方案:相较于传统的液压制动,线控制动以电子助力器替代了真空助力、以导线替代液压/气压管路。其工作原理为通过油门踏板传感器将驾驶人实际操作转变成电信号 传递给ECU,ECU对传输来的相关指令实施综合计算(传感器监测油门踏板的行程和力, 车速传感器判断汽车是否处于正常减速中),若判定为正常动作则将信号再次传递给制动执行器,最终实现制动。
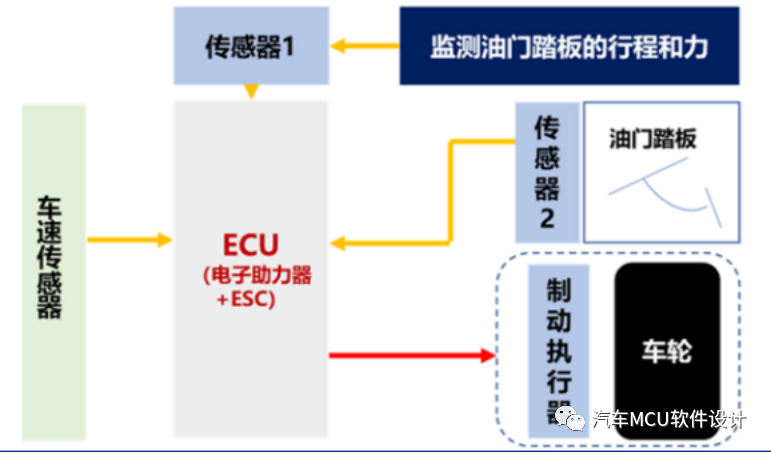
图 3 线控制动原理
02制动系统技术概览
以市面常见的线控制动系统为例,根据有无液压后备分为EHB电子液压制动和EMB电子机械制动。其中,EHB实现难度较低,仅用电子元件替代传统制动系统中的部分机械元件,保留传统的液压管路,当线控系统失效时备用阀打开即可变成传统的液压制动系统,因此也可理解为线控制动系统发展的第一阶段。
EHB根据集成度分为两种方案: Two-Box和One-Box。
Two-Box方案中,ESC和电子助力器是相互独立的模块,二者互为备份冗余;
One-Box方案中,ESC与电子助力器集成为一个模块,须额外增加备份冗余系统满足自动驾驶的需求。One-Box 方案具有集成度高、成本低、能量回收效率高等优势,逐渐成为线控制动的主流方案。
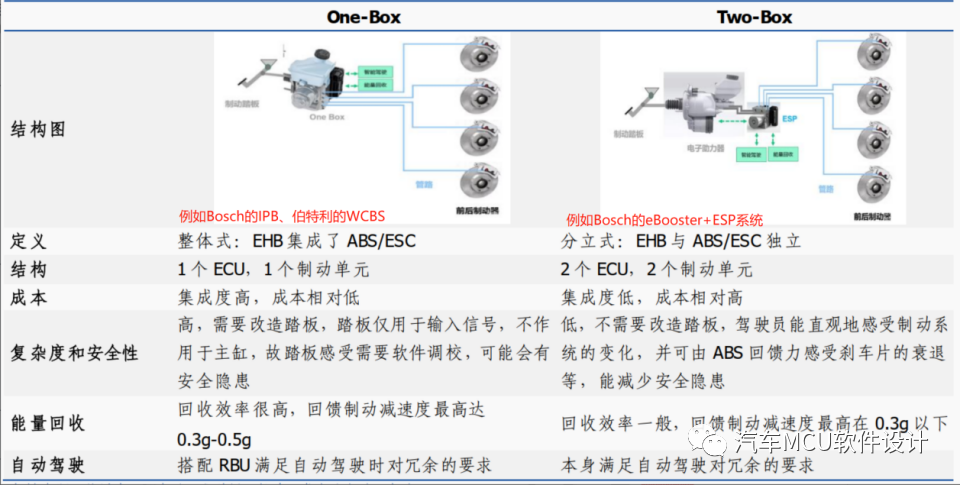
图 4 EHB分类(来源研报,如有侵权请联系我删除)
2.1 Two-Box系统架构(Bosch_IBooster)
目前,市面常见的智能刹车系统多为Two-Box架构,通过以eBooster+ESC组合的方案。
ESC和eBooster在车上共用一套液压系统,两者协调工作,原理如下:
eBooster和ESC共用一套制动油壶、制动主缸和制动管路。
eBooster内的助力电机产生驱动力推动主缸活塞运动,使油壶中的制动液流入主缸管路并进入ESC进液阀,经ESC中的调压阀和进液阀流入4个轮缸,从而建立起制动力。
当eBooster不工作时,ESC也可以独立控制制动液从主缸流入轮缸,从而建立制动力。
eBooster建压的动态响应速度比ESC主动建压更快,且NVH表现更好,因此eBooster是制动控制系统中的主执行机构。
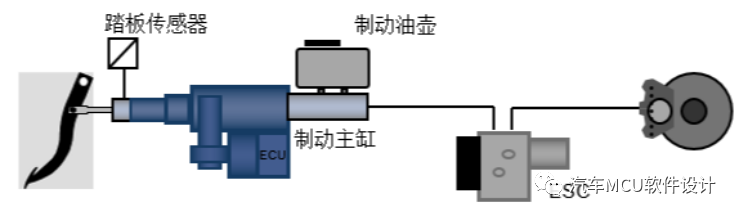
图 5 Two-Box系统架构
在正常功能下,eBooster通过控制助力单元高效精准地辅助驾驶员制动;当eBooster出现故障而导致助力系统失效时,eBooster请求ESC激活HBC(Hydraulic Brake Failure Compensation)功能,HBC功能激活后,当驾驶员踩下制动踏板时,主缸压力发生变化,HBC功能根据主缸压力变化识别驾驶员制动意图,并控制建压泵工作主动建立轮缸压力,从而实现驾驶员助力。而在eBooster和ESC都失效的情况下(如整车电源故障),驾驶员踩下制动踏板,踏板力直接作用在推杆上,推杆推动主缸活塞移动使主缸液压流入轮缸从而产生制动力,该过程为纯机械建压。
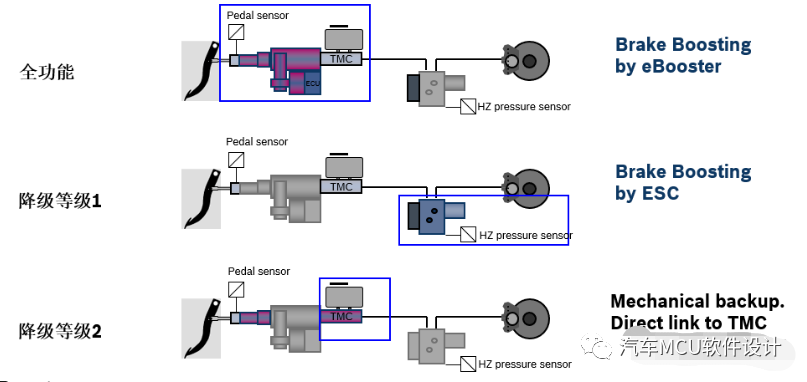
图 6 ESC降级策略
2.2 One-Box系统架构(Bosch_IPB)
以One-Box为例,从硬件构型来看,汽车线控制动系统仅由一个ECU和一个制动单元来构成;从软件控制来看,线控制动系统仅由一个ECU控制,该ECU一般称为ESC,ESC包含主要功能有:ABS、VCS、VDC、制动能量回收等功能。
ABS 可以将车轮滑移率保持在理想值,并防止车轮抱死;
TCS 用于保持车辆加速稳定,通过发动机 ECU(Electronic Control Unit)或者VCU和制动系统来调节驱动轮的过度滑转,保持驱动力处在最佳车轮滑转率范围;
VDC 用于转向角过大或者转向速率过快的工况,控制器根据横摆角速度或者质心侧偏角与目标值的偏差判断车辆是否跟随驾驶员转向意图,并对各个车轮进行有针对性的制动,减轻驾驶员操作负担并防止车辆侧滑。
博世推出的IPB(Integrated Power Brake)就是典型的One-Box架构;

图 7 Bosch IPB总成
其工作原理如下:
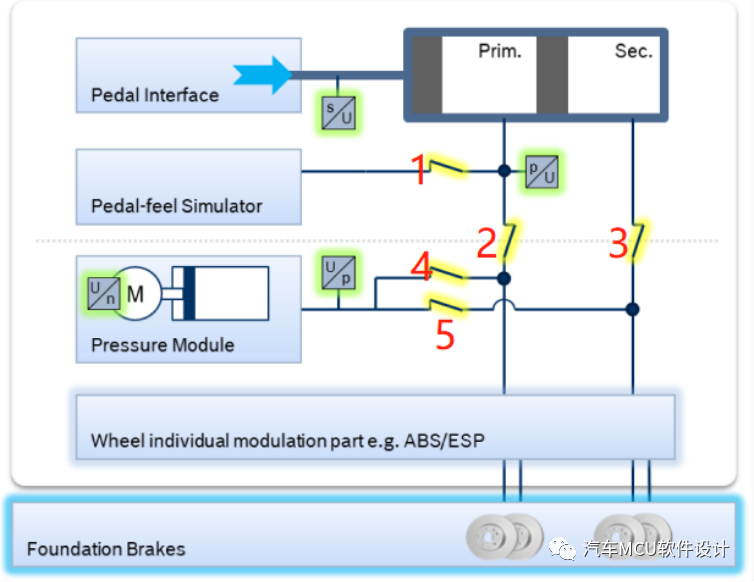
图 8 IPB的工作原理
正常工作时,阀1、4、5吸合,2、3断开。驾驶员踩踏板后制动液进入主缸和踏板模拟器并建立压力,踏板力-踏板行程曲线由主缸和踏板模拟器特性决定。与此同时,IPB ECU识别踏板位移信号,依据标定好的踏板位移-系统压力曲线控制电机建压,产生车辆减速度。在纵向及横摆运动控制中,通过ABS/ESC液压调制模块对各轮轮缸压力进行调节。因此,对于IPB制动系统,踏板位移-减速度曲线是可以通过刷新标定参数进行更改的。 IPB降级模式比较复杂,不同的失效类型对应不同的降级模式,这里对助力失效(如IPB断电)进行讨论。在此种模式下,IPB进入机械backup模式,阀1,4,5关闭,2,3打开,驾驶员踩踏板建立的压力直接进入轮缸并产生车辆减速度。根据法规ECE R13-H要求,系统应产生不小于2.44m/s^2的制动减速度。 因制动踏板解耦,无需过多考虑主缸需液量对踏板位移的影响,IPB的主缸缸径可比传统brake apply系统小,机械backup模式下,相同踏板力下系统产生压力较高。
2.3 ABS技术
ABS技术,又称为制动防抱死系统,顾名思义,就是指防止在汽车行车制动时车轮出现抱死的情况。所谓抱死,是指汽车车轮在制动时停止转动,以盘式刹车为例。刹车的时候,制动系统推动刹车片夹住车轮上的刹车盘,通过巨大的摩擦力使车轮停止转动,车辆就会由于轮胎和地面间的摩擦力而停下来。刹车的实质,其实就是将车辆的动能转换为刹车片与刹车盘之间,以及轮胎和路面之间发生摩擦而产生的热能。如果让车轮停止转动的制动力(刹车片与刹车盘之间的摩擦力)超过了轮胎和路面之间的静摩擦力,那么轮胎就会在路面上发生滑动,而车轮并不转动,这种现象就是车轮抱死。车轮一旦被抱死,不再滚动,那么在路面上滑行的汽车就像是在冰面上滑动的冰球,完全失去控制方向的能力,无法躲避障碍,还容易发生旋转,非常危险。当在湿滑路面上刹车时,由于轮胎与路面之间的静摩擦力很小,比较容易被制动力超过,造成抱死。而在干燥路面上大力急刹车的时候,要是制动力非常大,也会超过轮胎和地面之间的静摩擦力,同样造成抱死。 在没有ABS的年代,有经验的驾驶员会通过“点刹”来防止车轮抱死,也就是踩一点刹车后再松一点刹车,不断反复。ABS实际上就是在ECU控制下的自动点刹。在需要紧急制动的情况下,驾驶员只需要大力踩死刹车,专心控制方向。ABS会自动根据传感器获得的信息高速做出交替刹车和松开刹车的动作,点刹的速度可以高达每秒十几次。ABS还可以通过控制刹车液的压力自动调整每个车轮上刹车的力度,以达到最佳的刹车效果,同时保证车轮不被抱死。
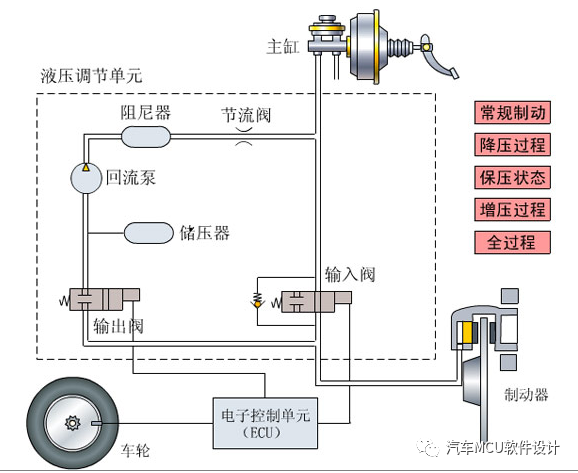
图 9 ABS工作原理
从图4可以看出,当常规制动时,ABS不起作用,但是即使在这种情况下,轮速传感器也一直监测着车轮的减速度,当轮速传感器信号表明车轮正在趋于抱死时,ECU给液压调节单元发出控制指令,激活输入阀,输入阀的动作将制动回路与主缸断开,停止制动压力继续增长,由于输出阀此时仍处于关闭状态,使压力保持不变,这就是保压状态。这种状态下,如果轮速传感器的信号表示车轮依旧减速太快,ECU就给液压调节单元发出控制指令,打开输出阀,制动液在回油泵的作用下从制动回路回到制动主缸,制动轮缸的压力减小,使车轮的制动减弱,这就是减压状态。当轮速传感器的信号表明由于制动液压力的减小车轮重新加速时,ECU停止向液压制动单元发出电流,关闭输出阀,打开输入阀,此时制动液的压力又增大,又使车轮开始减速,每秒钟这一循环重复四到六次。这就达到防止车轮抱死的目的。
2.4 TCS技术
牵引力控制系统简称TCS,又称驱动防滑控制系统。它能防止车辆尤其是大马力车在起步、加速时驱动轮打滑,维持汽车行驶的稳定性;本质上,TCS是ABS系统在汽车上的衍生产物。从汽车理论角度,TCS主要是通过调节驱动力矩的大小,保证该力矩不超过轮胎与路面的最大附着力,提高车辆安全性。
以混动汽车为例(涵盖发动机和电机),TCS的常见控制方式如下:
发动机输出转矩调节
通过调节发动机节气门开度、点火参数和调节燃油供给量三种方法可以控制发动机的输出转矩。
节气门开度调节是通过控制发动机节气门的开度角来控制进气量,从而调节发动机的输出扭矩。采用这种控制方式时,发动机工作平稳,但响应较慢。
点火参数调节是指减小点火提前角,燃油供给调节是指减小供油量或暂停供油,这两种控制方法响应较快,但可能会引起发动机的不正常工作。
发动机输出转矩调节是最早应用的牵引力控制方式,它在低附路面上或在高速时控制效果比较好。但是发动机响应较慢,而且会同时调节所有驱动轮的驱动力矩,因此主要在低附路面和高速时使用,提高汽车的行驶稳定性。
驱动轮制动力矩调节
驱动轮制动力矩调节是比较常用的控制方式,是指在打滑的驱动轮上施加适当的制动力矩,从而控制其滑转率在最佳范围内。这种控制方式响应较快,而且对有独立通道的制动系统可以独立控制各车轮的制动力矩,这种方式在分离路面上效果较好;但长时间对驱动轮施加制动力矩会导致制动器过热;汽车中高速行驶时,可能造成驱动轮的驱动力相差较大而对车辆稳定性产生影响,所以中高速时不宜使用。
电机输出转矩调节
电机输出转矩调节是通过调节电机的电压、转速或电流来控制电机的输出转矩。这种控制方式响应快、灵敏度高且精确,比制动力矩的调节响应更快,而且控制方便,电机转矩在混合动力汽车中起“削峰填谷”的重要作用,所以电机转矩调节是混合动力汽车牵引力控制的重要控制方式。
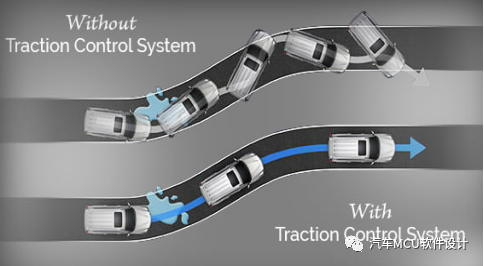
图 10 TCS用途
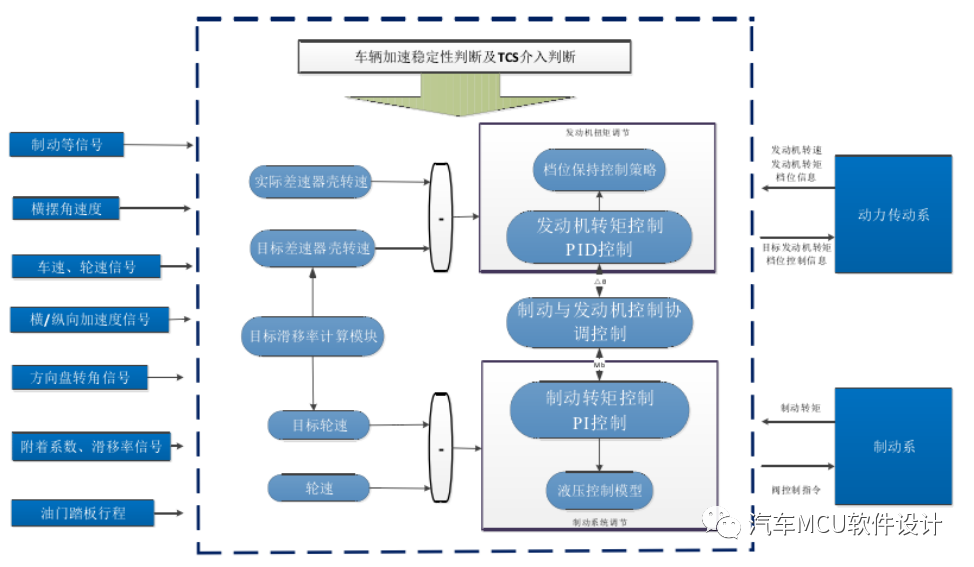
图 11 TCS控制框图
上图描述了两个控制功能,一个是发动机扭矩调节,其通过与发动机 ECU 通讯,请求驱动单元通过调节电子节气门、燃油量和点火提前角来减少发动机转矩,如果车辆为汽油机,则由发动机 ECU通过控制空燃比或延迟点火时间以实现调节发动机实际转矩(电机);另一个是制动力矩调节,在液压控制系统的作用下,请求制动力矩介入制动打滑车轮,在这两个控制功能共同作用下保持驱动轮转速在理想范围内以提高复杂工况下汽车的加速性能。
2.5 VDC技术
VDC 控制主要用于防止车辆侧向失稳,比如限制汽车在高速行驶或者在附着力较低的路面上可能会发生转向不足或转向过度的现象,并且将车辆横向稳定性、跟随理想横摆角速度和抑制质心侧偏角作为目标。车辆横向失稳产生的原因主要来自以下三个方面:
转弯离心力的作用下,轮胎的弹性效应和侧偏特性,使得轮胎产生侧偏角,导致车辆出现横向偏移;
转弯时突然的制动和驱动,使得轮胎的侧偏刚度减低,因此车辆侧滑;
驾驶员误操作,比如快速打方向盘并且制动,车辆进入非线性区域,质心侧偏角迅速增大,偏离期望轨迹。
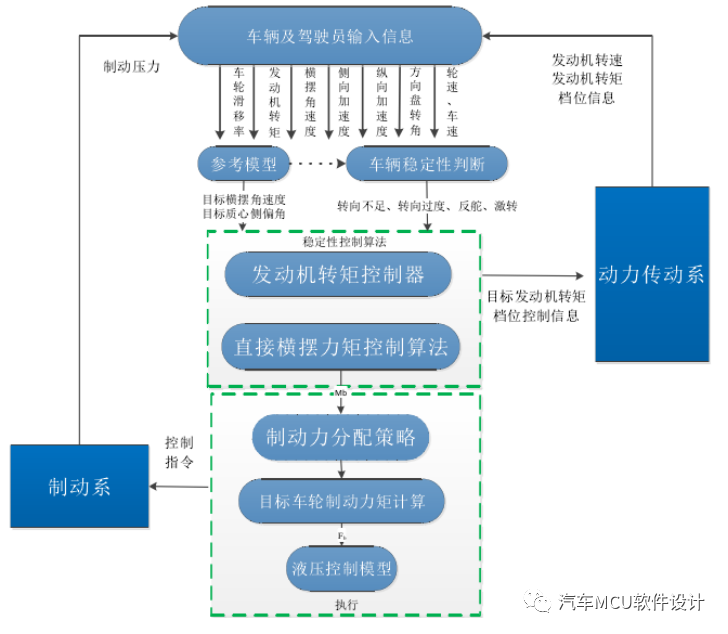
图 12 VDC控制原理
VDC 接收车身物理状态如速度、横摆角速度、侧向加速度;车轮的物理特性如车轮滑移率;方向盘转角信号和发动机转矩,并在极端工况下通过发动机扭矩调节与横摆力矩修正共同用于调节车辆横向稳定性。首先根据质心侧偏角、侧向加速度、方向盘转角和车速的门限设定以识别车辆是否存在侧滑危险,并将其作为 VDC 介入判断办法;然后,在不同工况下修正并计算目标横摆角速度,并结合与车辆实际横摆角速度差值和质心侧偏角,将失稳
工况区分为过度转向、不足转向、反舵和激转;车辆处在不足转向情况下,制动内后侧车轮,如果内后轮出现抱死,则协调制动内前车轮,车辆处在过度转向情况下,制动外前轮,如果前外轮出现抱死,则协调制动前内侧车轮。最后,根据车辆横摆力矩与制动力的动力学关系,确定被控车轮制动力矩以产生目标横摆力矩。
2.6 EPB技术
EPB(电子驻车制动)是线控技术在驻车系统的应用。EPB 采用电信号传输,实现了驻车制动的电子化控制,具有更快的响应速度。L2 的ACC/AP/AEB 等功能中,EPB起到请求和解除驻车的作用。 当驾驶员按动 EPB 按钮时, EPB 的控制模块接到来自按钮的信号,
控制模块向执行机构的电机施加电流使其转动,电机释放的转矩在降速、增扭后,通过输 出轴螺纹副或滚珠丝杠副将电动制动单元输出的扭矩转化为直线推力,推动制动活塞运动, 将推力转化为制动块压紧至制动盘的压力,进而实现车辆车速减少或驻车制动。
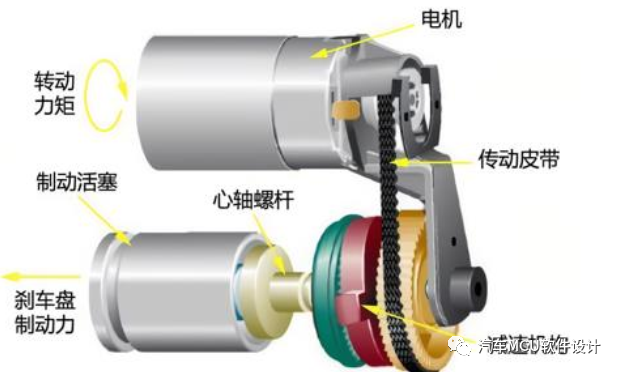
图 13 EPB执行机构
集成型 EPB 可联动 ABS/ESC 等核心安全系统。根据是否有单独 EPB ECU 划分,EPB可分为ECU独立型和ECU集成型,集成型EPB将EPB和ESC系统整合在一个控制器里,降低了ECU成本和线束等部件布局的复杂性,并且 EPB 硬件更加模块化(可整合ABS、ESC、 ACC等功能),提高车辆行驶的安全性。因技术要求,集成型EPB需要企业具备ESC的生产能力。
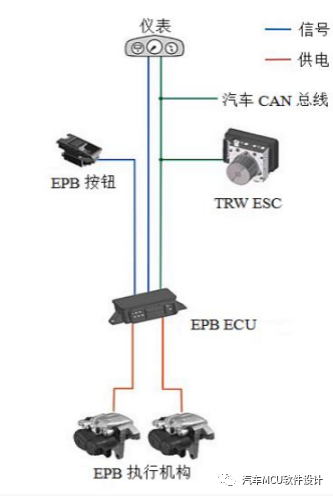
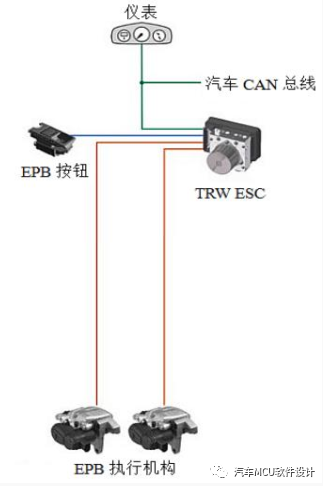
图 14 ECU集成式EPB 图 15 ECU独立式EPB
2.7 小结
可以看到,从ABS技术诞生开始,逐步衍生出了TCS、VDC等技术。随着芯片技术的发展,已逐渐将上述功能都融入到一个ECU中;其本质还是根据车辆当前状态通过调节制动液压、发动机力矩、电机力矩来合理分配驱动力、制动力,以达到保持车辆制动和稳定的目的。
03发展趋势
随着技术的发展,底盘相关控制会逐步趋向于域控的形式。底盘域控制器是包括域主控硬件、操作系统、算法和应用软件等组成的整个系统的统称,是一个大的运算平台, 在“中央集成+域控制器”架构下, 底盘域控制器将作为汽车“小脑”,其作用如下:
接受上层感知层和决策层的指令;
建立统一的车辆动力学概率模型,实现多执行系统的优化协同控制;
将上层决策指令传递给各线控底盘子系统 ECU,实现动力控制。底盘域控能够实现底盘传感系统整合与信号融合,优化整车功能安全等级与驾乘体验,是实现线控底盘运算集成化的必要构件。目前,主机厂将更多精力放在“大脑”(智能驾驶域控制器)上,而开发流程较为复杂、调校周期较长的“小脑”(底盘域控制器) 更多交由第三方供应商协作完成。
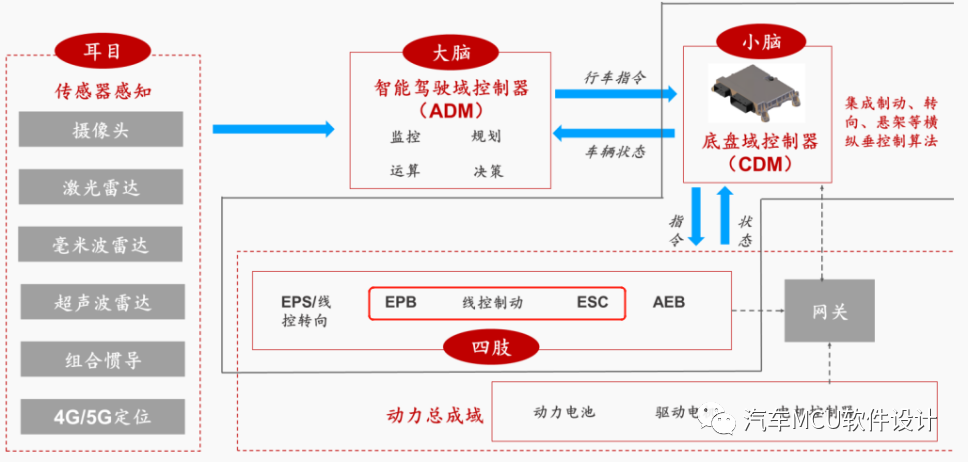
图 16 底盘域控架构
审核编辑:汤梓红
-
电动汽车制动系统与传统汽车的区别2024-11-28 2607
-
reertos基本功能包括什么2021-12-27 1583
-
串口的基本配置和基本功能是什么?2021-12-10 2055
-
STM32CUBEMX基本功能如何配置?2021-11-23 1832
-
智能合约的基本功能是什么2021-07-12 1610
-
MCU的基本功能2021-02-05 3123
-
MCU的基本功能和程序编写2021-01-14 2259
-
MCU的基本功能及程序编写2021-01-12 1787
-
物联网的最基本功能是什么?2020-06-16 1943
-
NTP的基本功能和工作原理2016-04-12 1967
-
制动系统的基本功能和分类有哪些?2010-03-11 18747
-
制动系统工作原理图解分析2010-03-10 9063
-
气压制动系统ABS/ASR装置的工作原理与检修2009-11-21 7016
全部0条评论

快来发表一下你的评论吧 !
