

VASS06安全机器人执行制动器测试或校准测试
机器人
描述
FB 292 FB_Rob_Safe

该块用来控制Safe机器人。
该数据块通常会随自己的背景数据块一起被调用。
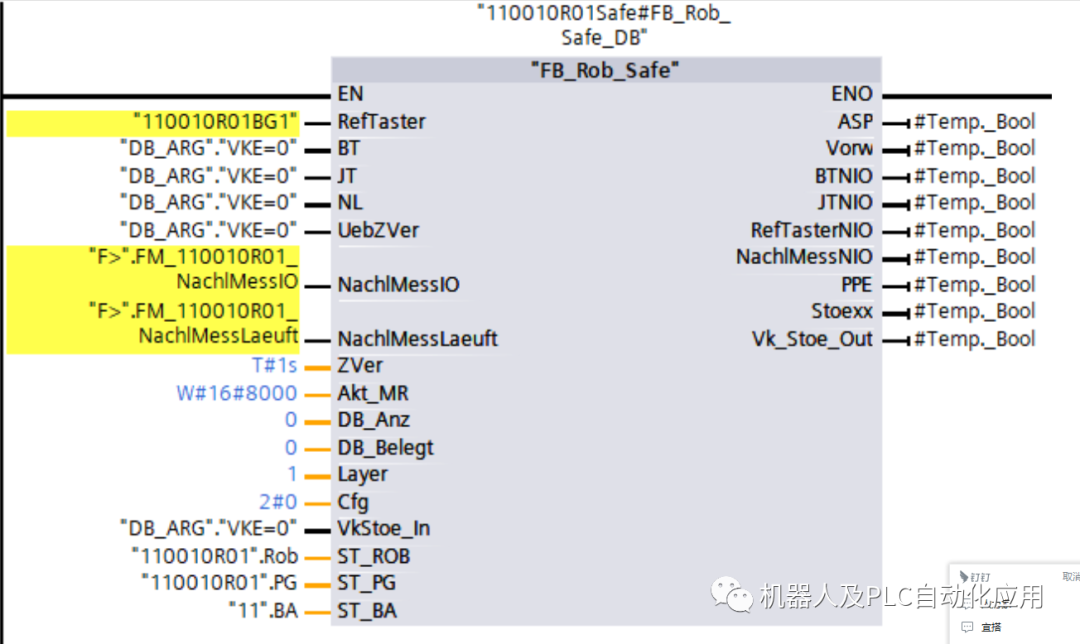
| 名称 | 类型 | 说明 |
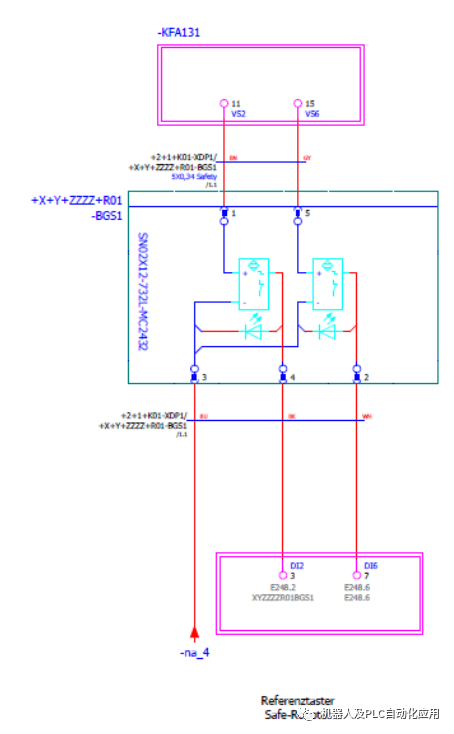
| RefTaster | BOOL | Safe 机器人寻参按钮 |
| BT | BOOL | 执行制动器测试 |
| JT | BOOL | 执行校准测试 |
| NL | BOOL | 执行延时关闭测量 |
| UebZVer | BOOL | 桥接自动维护选择的延迟时间 |
| NachlMessIO | BOOL | 延时关闭测量正常 |
| NachlMessLaeuft | BOOL | 延时关闭测量正在进行 |
| ZVer | TIME | 自动维护选择的延迟时间 |
| Akt_MR | WORD | 活动的信号域 1 激活 Bit0 -> MR1 …..Bit15-> MR16 |
| DB_Anz | WORD | 对接站最大数量 6 |
| DB_Belegt | WORD | 对接站被占用 Bit0 -> DB1 …..Bit7-> DB8 |
| Layer | INT | 可视化对象的 Layer 编号 |
| Cfg | WORD | 组态位(参见组态位表格) |
| VkStoe_In | BOOL | 与 Vk_Stoe_Out 连锁的集中故障 |
| ASP | BOOL | 服务程序请求 |
| Vorw | BOOL | 预警 |
| BTNIO | BOOL | 制动器测试正常 |
| JTNIO | BOOL | 校准寻参不正常 |
| RefTasterNIO | BOOL | 寻参按钮故障 |
| NachlMessNIO | BOOL | 延时关闭测量不正常 |
| PPE | BOOL | 到达停放位置 |
| Stoexx | BOOL | 故障 |
| Vk_Stoe_Out | BOOL | 连锁故障 |
工作方式
该块用来控制Safe机器人。
执行制动器测试或校准测试
机器人在每个工作序列和维护序列中的序列开始处查询选择制动器测试、选择校准测试和服务程序请求。如果存在选择或请求,就执行相应的功能。在执行之后重新重置选择或请求,并且将序列处理完毕。
选择制动器测试或校准测试
如果机器人处在序列125中的0点,并且不存在其他后续任务,那么在选择制动器测试或者校准测试的情况下,就会在设置的延迟时间‘ZVer’结束之后,自动为机器人选择维护。执行制动器测试或者校准测试之后自动重新确认维护位置。如果机器人不使用延时执行所选的功能,则要么必须通过‘维护’按钮选择维护,或者块输入‘UebZVer’为True。这里也会在执行制动器测试或校准测试之后自动确认维护位置。
可以通过.Cfg.X1 true或.Cfg.X5 true禁用校准测试或制动器测试,如果机器人不予支持。
服务程序请求
如果机器人处在序列125中的0点处,并且不存在其他后续任务,那么当存在服务程序请求时,就会在设置的延迟时间‘ZVer’结束之后自动为机器人选择维护。执行所请求的功能之后自动重新确认维护位置。如果机器人不使用延时执行服务程序请求,则块输入‘UebZVer’必须为True。这里也会在执行所请求的功能之后自动确认维护位置。如果在出现服务程序请求时通过‘维护’按钮选择维护(没有选择制动器测试和校准测试),机器人就会在执行所请求的功能之后进入维护位置,并且停在那里(不自动确认)。
如果机器人将服务程序请求发送给PLC并且因此也必须自动选择制动器测试,则.Cfg.X4必须为true。
显示制动器测试、校准测试、寻参按钮、故障和服务请求
在可视化对象上显示制动器测试、校准测试、寻参按钮、故障和服务请求。此外还将详细的故障消息输入到消息系统之中。
‘A252制动器磨损预警’= True-并且-
'A253制动器测试不正常'= False
A254校准寻参不正常'= True
‘RefTaster’= True (Safe机器人寻参按钮)-或-'A250当校准测试时' = True

'A251服务程序请求' = True 
选择和取消制动器测试
只能通过可视化选择制动器测试(通过‘制动器测试’按钮)。不可以取消制动器测试。
选择了制动器测试并且执行(按键颜色蓝色)'A249当制动器测试时' = True
选择和取消校准测试
可以通过‘校准测试’按钮选择或取消校准测试(切换功能)。当出现负边沿时‘当校准测试时’自动取消校准测试。仅当是KUKA机器人的时候才能进行校准测试。如果是ABB机器人,就会隐藏该按钮并且功能不激活。
A249当校准测试时' = True
选择和取消延时关闭测量
只能通过可视化选择延时关闭测量(通过‘延时关闭测量’按钮)。不可以取消延时关闭测量。

Safe机器人显示和消息激活
如果.Cfg.X6为true,则激活Safe机器人显示。此外如果Safe机器人未激活,也会生成消息。
可以通过.Cfg.X7定义是否通过安全的机器人输出A2.0(安全轴监控激活)或者A.7.7(Safe组态互锁)形成显示和消息。当.Cfg.X7为false时使用A2.0,为true时使用A7.7。
Safety连接
应通过现场总线、而不是在机器人机柜中连接校准寻参按钮。
Safe机器人寻参按钮
应使用内部编码器电源将所使用的寻参按钮设计成2通道。
应根据Safety通道设置的类型1将输入组件的通道参数化(参见设计规范“VASS V6 Standard设计规范TIA_V_x_y”附录中的表格“Distributed Safety”
编辑:黄飞
-
电机测试如何选择负载制动器2015-10-21 2306
-
轮边电机制动器及其设计计算2025-06-10 354
-
智能制动器参加“汇新杯”新兴科技+互联网创新大赛2018-05-09 2117
-
伺服驱动器和机器人智能制动阐控制和诊断包括BOM及层图2018-10-22 2585
-
传感器在制动器试验台信号采集系统的应用2018-10-25 3062
-
电梯制动器介绍_电梯制动器作用2012-05-10 2473
-
电梯制动器静态制动力矩估算方法2018-03-06 2540
-
制动器的分类2019-01-14 23404
-
8.3安全机器人---抱闸测试解析2020-07-03 5167
-
博途VASS06的CPU设置要求2020-12-23 5419
-
制动器是什么_制动器的组成2021-01-27 18418
-
VASS 05安全机器人PLC控制FB2922022-04-11 1667
-
如何使用外部电源来释放ABB机器人电机制动器2022-08-29 3894
-
大众VASS06报警信息提示功能2023-01-05 2759
-
盘式制动器与鼓式制动器相比有哪些优点2024-01-18 2417
全部0条评论

快来发表一下你的评论吧 !
