

自动驾驶ALKS与ELKS最基本的区别
汽车电子
2445人已加入
描述
在 联合国自动驾驶法规R157最新技术指标分析 中,法规君分享了全球首个针对L3的量产准入法规 UN R157 01 series 的主要技术指标。
文章发出后,有读者在后台交流,ALKS与ELKS的边界在哪里?
此前在 车道保持系统(LKA/LKS)中欧法规解读 中,法规君曾分享过紧急车道保持系统(emergency lane-keeping system,ELKS)的主要技术指标。
ALKS与ELKS最基本的区别,是能否允许驾驶员脱手控制,当然这也是判定L3与L2的分水岭,详见 中国的自动驾驶汽车终于来了?
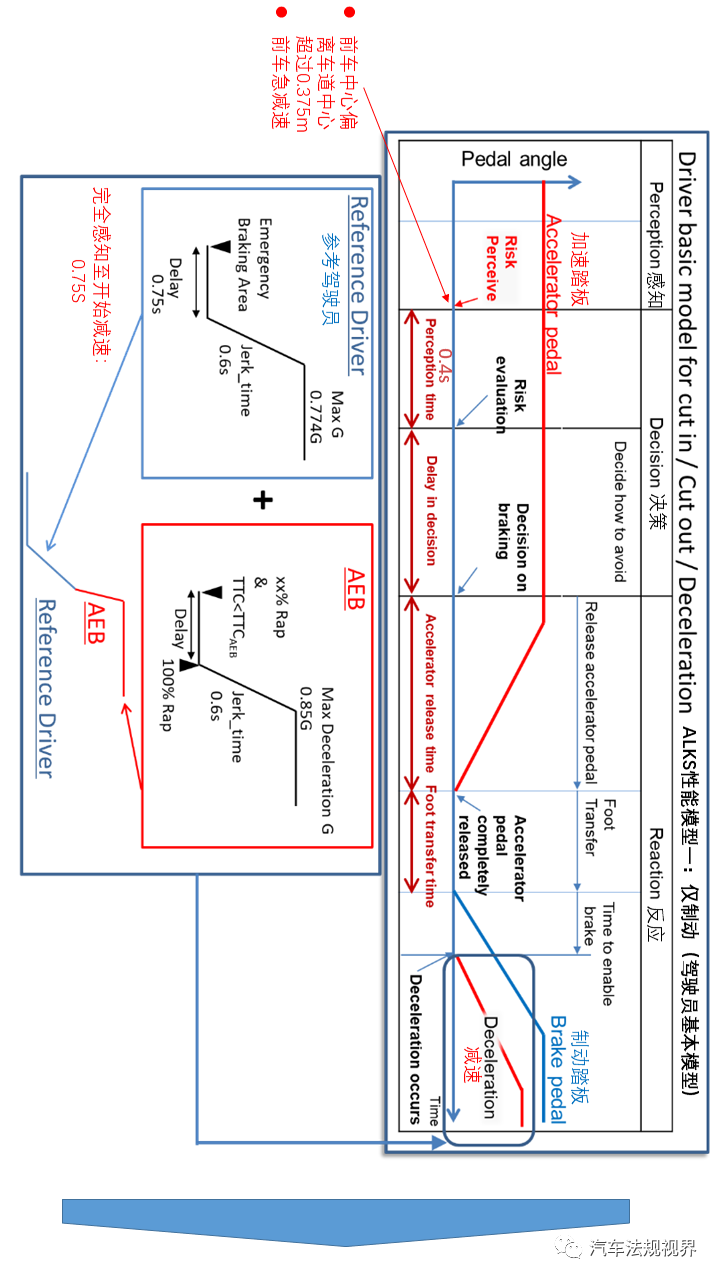
根据 UN R157 的理念,若一个现实中熟练的驾驶员可以避免某类事故,则ALKS自动驾驶汽车也应能避免该事故。
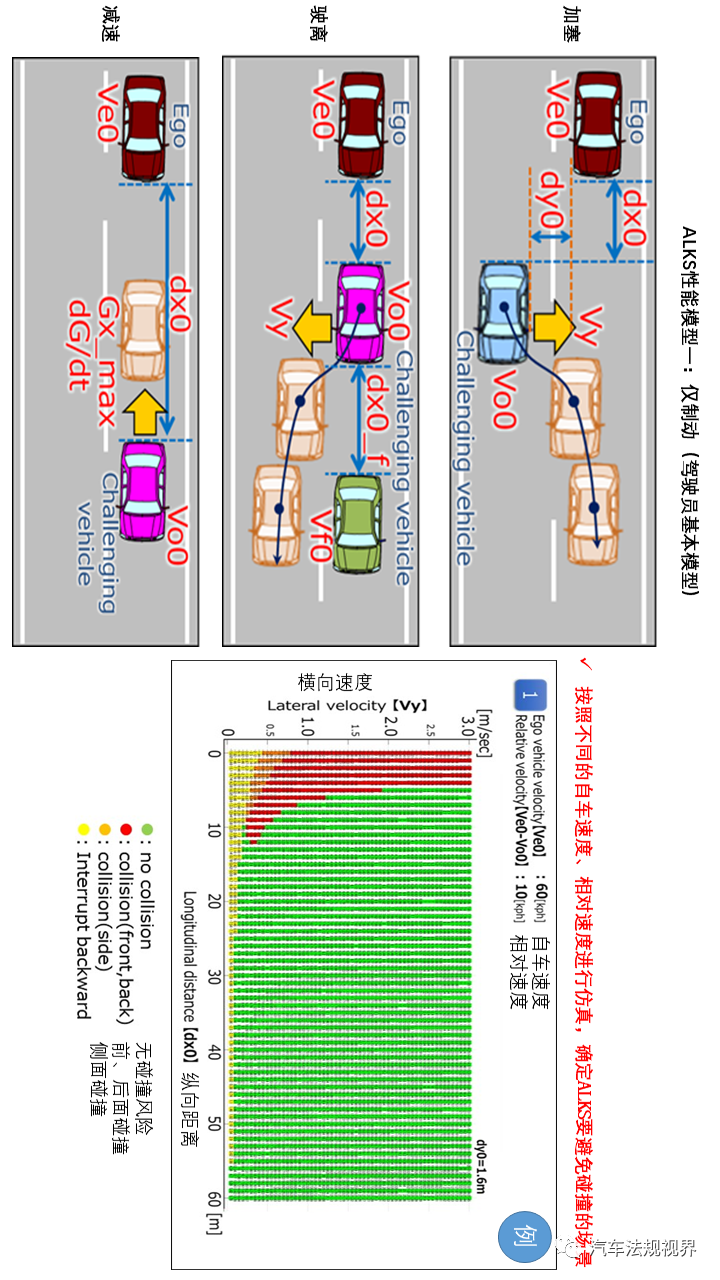
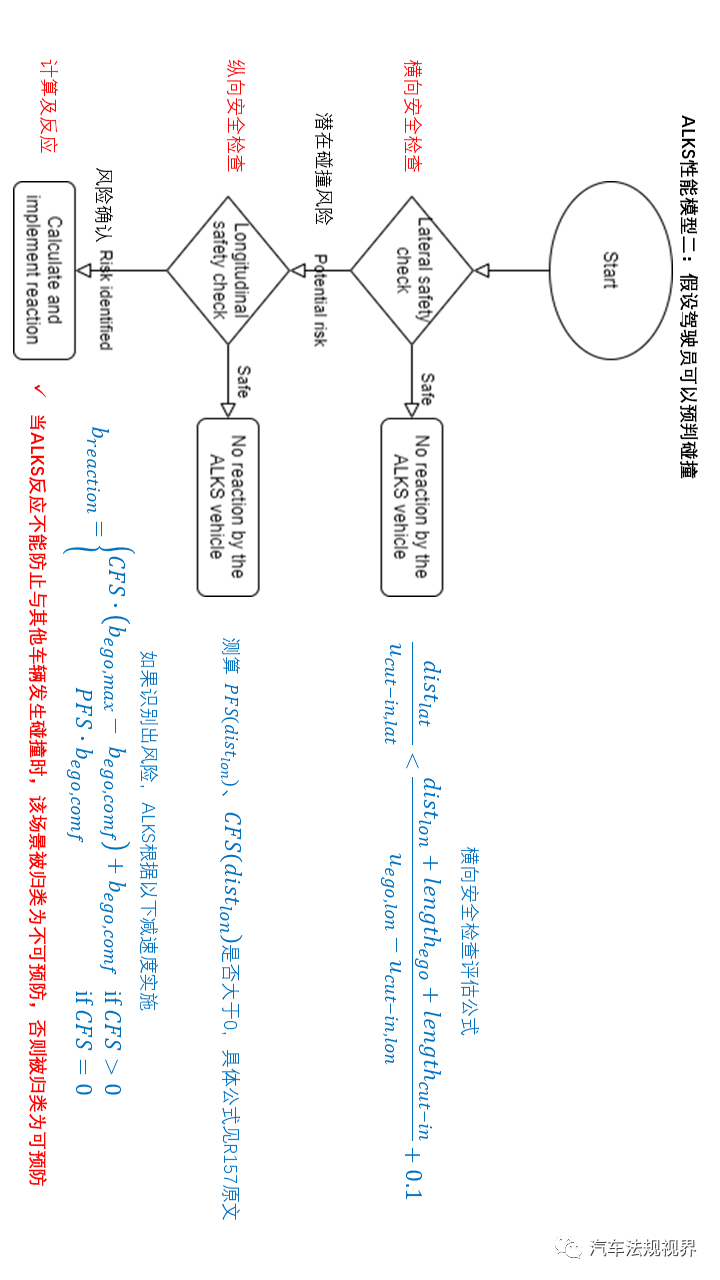
为验证上述理念,UN R157将ALKS关键碰撞场景分为可预防场景、不可预防场景2种,并基于两个性能模型,通过大量的仿真计算来确定具体场景是否可预防。
(以下内容请横屏查阅)
说直白点,ELKS只是辅助“人”保持在车道内安全行车,ALKS则一直尽力表现得像个“人”,甚至超越“人”。
这也是L3+时代,机器与人针对车辆“控制权”之争的缩影。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 自动驾驶
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8354
-
自动驾驶技术的实现2021-09-03 3224
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2436
-
如何打造自动驾驶「自行车」的呢2021-08-26 2315
-
如何保证自动驾驶的安全?2020-10-22 2195
-
联网安全接受度成自动驾驶的关键2020-08-26 3311
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2905
-
如何让自动驾驶更加安全?2019-05-13 3742
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7553
-
自动驾驶的到来2017-06-08 7449
-
细说关于自动驾驶那些事儿2017-05-15 7178
-
自动驾驶真的会来吗?2016-07-21 14543
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14252
-
汽车自动驾驶技术2016-04-14 5581
全部0条评论

快来发表一下你的评论吧 !
