

基于瑞萨RA MCU的手势识别控制终端设备设计
描述
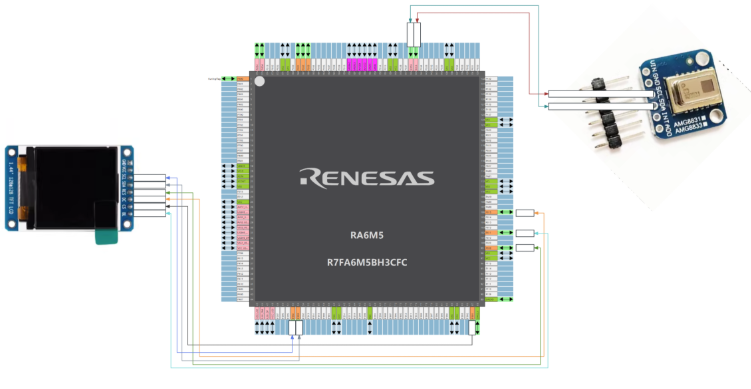
本项目主要以启明6M5开发板作为主控,通过AMG8833模块获取手部的温度,然后通过BP神经网络解析温度数据,来识别手部动作。当手部动作和预定控制指令激活动作相匹配时,向外部设备发送控制指令,当外部设备接收到对应指令执行对应的操作。
因为该设备是通过手部温度作为控制变量,所以项目运行的温度在28℃摄氏度下(设备静态是经过传感器测量得到的数据)。手部温度为33℃左右,手部距离传感器大概在5cm左右,并且处于传感器芯片正前方。说明:环境温度会影响传感器的识别。
硬件部分
①设备型号
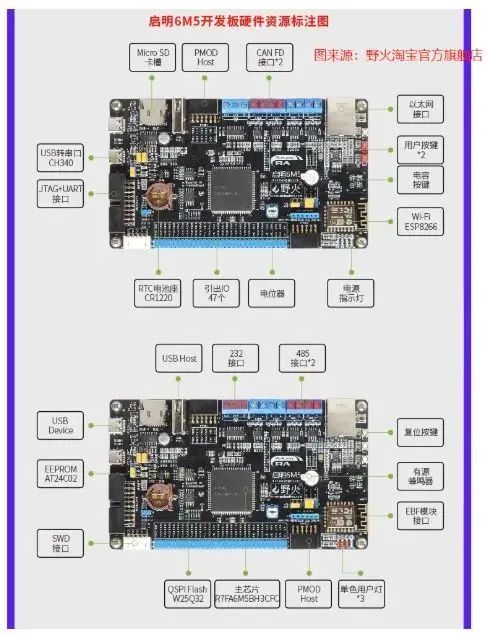
野火RA6M5开发
②外围设备
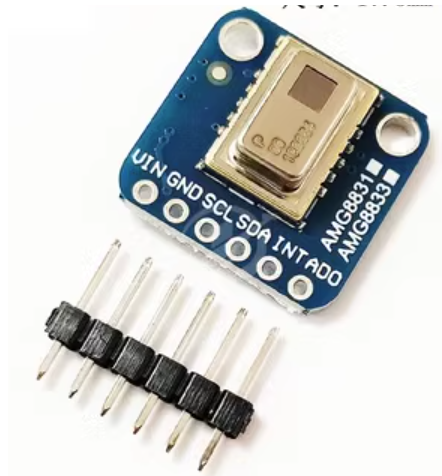
GY- AMG8833 IR 8x8 红外热像
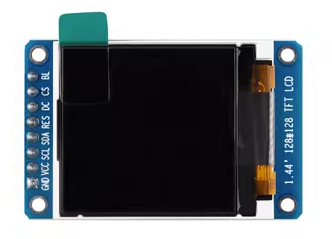
1.44寸彩色TFT显示屏高清IPS LCD液晶屏模块128*128
③其他配件
面包板 x 1杜邦线若干
④设备引脚配置
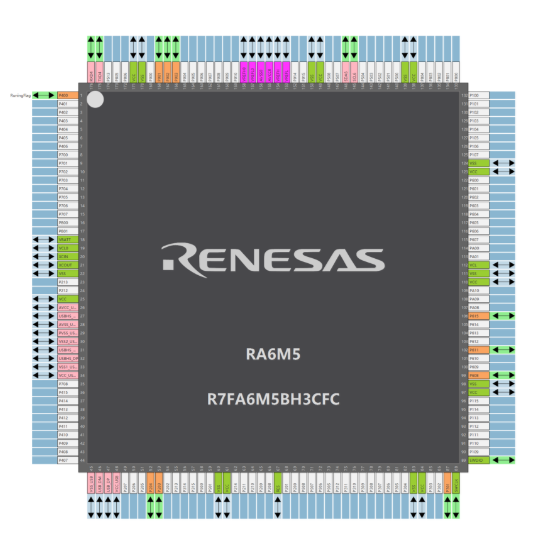
⑤引脚连接
以及串口:
TX : P512
RX: P511
软件部分
项目完成使用到的软件有:
e2 studio
vs code
字模软件 PCtoLCD2013
野火串口调试助手
软件部分代码说明:
1、GY- AMG8833 IR 8x8 红外热像仪 驱动部分代码说明:
AMG8833模块使用I2C 通讯协议:(使用硬件I2C)
下面是模块是主要的各个功能驱动函数
根据数据手册说明:只要主机向从机发送0x80指令,从机设备 会直接 一次性按顺序发送完 温度栅格点 1-64 的温度数据
其他指令:按照I2C 通讯协议读取
I2C 驱动 .C 文件部分函数
// 设置传感器模式
void AMG88_SetSensorMode(AMG88_OperatingMode Mode)
{
unsigned char buffer[2]={0x00,Mode};
R_SCI_I2C_Write(&g_i2c6_ctrl, buffer, 2, false);
return;
}
// 获取当前传感器模式
unsigned char AMG88_GetSensorMode(void)
{
unsigned char OperatingModeBuffer=0;
R_SCI_I2C_Write(&g_i2c6_ctrl, 0, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, &OperatingModeBuffer, 1, false);
return OperatingModeBuffer;
}
// 重启传感器
void AMG88_SensorReset(AMG88_ResetMode Mode)
{
//
unsigned char ResetBuffer[2]={0x01,(unsigned char)Mode};
//unsigned char ResetBuffer=0x30;
R_SCI_I2C_Write(&g_i2c6_ctrl, ResetBuffer, 2, false);
return;
}
// 设置帧率
void AMG88_SetFrameRate(AMG88_Frame Frame)
{
unsigned char ResetBuffer[2]={0x02,(unsigned char)Frame};
//unsigned char ResetBuffer=0x30;
R_SCI_I2C_Write(&g_i2c6_ctrl, ResetBuffer, 2, false);
return;
}
// 获取传感器帧率
unsigned char AMG88_GetFrameRate(void)
{
unsigned char OperatingModeBuffer=0;
unsigned char Address[1]={0x02};
R_SCI_I2C_Write(&g_i2c6_ctrl, Address, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, &OperatingModeBuffer, 1, false);
R_BSP_SoftwareDelay(2, 1000);
return OperatingModeBuffer;
}
// 设置中断控制寄存器
void AMG88_SetICR(AMG88_ICR_REGISTER ICR)
{
unsigned char ResetBuffer[2]={0x03,(unsigned char)ICR};
//unsigned char ResetBuffer=0x30;
R_SCI_I2C_Write(&g_i2c6_ctrl, ResetBuffer, 2, false);
return;
}
// 获取中断控制寄存器的数据
unsigned char AMG88_GetICR(void)
{
unsigned char OperatingModeBuffer=0;
unsigned char Address[1]={0x03};
R_SCI_I2C_Write(&g_i2c6_ctrl, Address, 1, true);
// R_SCI_I2C_Write(&g_i2c6_ctrl, 0x03, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, &OperatingModeBuffer, 1, false);
return OperatingModeBuffer;
}
// 获取当前传感器状态
unsigned char AMG88_GetStatus(void)
{
unsigned char OperatingModeBuffer=0;
unsigned char Address[1]={0x04};
R_SCI_I2C_Write(&g_i2c6_ctrl, Address, 1, true);
// R_SCI_I2C_Write(&g_i2c6_ctrl, 0x04, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, &OperatingModeBuffer, 1, false);
return OperatingModeBuffer;
}
// 清除传感器标志位
void AMG88_SetStatusClear(AMG_Status_FLAG ClearStatus)
{
unsigned char ResetBuffer[2]={0x05,(unsigned char)ClearStatus};
//unsigned char ResetBuffer=0x30;
R_SCI_I2C_Write(&g_i2c6_ctrl, ResetBuffer, 2, false);
return;
}
//
void AMG88_SetAverage(BOOL Flag)
{
unsigned char ResetBuffer[2]={0x07,(Flag==TRUE)?(0xFF):(0)};
//unsigned char ResetBuffer=0x30;
R_SCI_I2C_Write(&g_i2c6_ctrl, ResetBuffer, 2, false);
}
//
unsigned char AMG88_GetAverage(void)
{
unsigned char OperatingModeBuffer=0;
// R_SCI_I2C_Write(&g_i2c6_ctrl, 0x07, 1, true);
unsigned char Address[1]={0x07};
R_SCI_I2C_Write(&g_i2c6_ctrl, Address, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, &OperatingModeBuffer, 1, false);
return OperatingModeBuffer;
}
// 设置中断优先级
void AMG88_SetILR(unsigned char *ValueBuffer,unsigned char ArrayLenth)
{
unsigned char ResetBuffer[7]={0x08,0x00,0x00,0x00,
0x00,0x00,0x00};
if(ArrayLenth<=7 && ArrayLenth >= 1)
return;
for(unsigned char i= 1 ;i<7;i++)
{
if(i%2==0)
{
ResetBuffer[i]=(0x0F & ValueBuffer[i-1]);
}else
{
ResetBuffer[i]=ValueBuffer[i-1];
}
}
//unsigned char ResetBuffer=0x30;
R_SCI_I2C_Write(&g_i2c6_ctrl, ResetBuffer, ArrayLenth+1, false);
return;
}
unsigned char Tempeture_Flag[2];
// 获取传感器 热敏电阻 电阻值
unsigned short AMG88_GetThermistor(void)
{
unsigned short buffer_flag=0;
unsigned char Address[1]={0x0E};
R_SCI_I2C_Write(&g_i2c6_ctrl, Address, 1, true);
// R_SCI_I2C_Write(&g_i2c6_ctrl, 0x0E, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, &Tempeture_Flag[0], 1, false);
R_BSP_SoftwareDelay(2, 1000);
Address[0]=0x0F;
R_SCI_I2C_Write(&g_i2c6_ctrl, Address, 1, true);
R_BSP_SoftwareDelay(2, 1000);
R_SCI_I2C_Read(&g_i2c6_ctrl, &Tempeture_Flag[1], 1, false);
R_BSP_SoftwareDelay(2, 1000);
buffer_flag=Tempeture_Flag[1]<<8;
buffer_flag|=Tempeture_Flag[0];
return buffer_flag;
}
unsigned char Buffer[10];
unsigned char Revice[128];
// 获取传感器的温度
void AMG88_SensorData(void)
{
/*
* register address
*
* */
Buffer[0]=0x80;
//Send slave address
R_SCI_I2C_Write(&g_i2c6_ctrl, Buffer, 1, true);
R_BSP_SoftwareDelay(2, 1000);
//Read Register data
R_SCI_I2C_Read(&g_i2c6_ctrl, Revice, 128, false);
}
2、1.44寸彩色TFT显示屏高清IPS LCD液晶屏模块128*128 部分代码说明
该LCD 液晶屏使用SPI 通讯协议:(使用模拟SPI)
驱动芯片为ST7735SPI
驱动 .C 文件部分函数
void SPI_init(void)
{
SET_LED();
SET_CS();
SET_CDX();
SET_RST();
SET_CLK();
SET_SDA();
return;
}
void SPI_SendData(unsigned char Data) // CDX = 1
{
unsigned char i;
for (i = 0; i < 8; i++)
{
CLEAR_CLK();
if ((Data & 0x80) != 0)
SET_SDA();
else
CLEAR_SDA();
Data <<= 1;
SET_CLK();
}
return;
}
void SPI_WriteCommand(unsigned char Data) //CDX = 0
{
CLEAR_CS();
CLEAR_CDX();
SPI_SendData (Data);
SET_CS();
return;
}
void SPI_WriteData(unsigned char Data) //CDX = 1
{
CLEAR_CS();
SET_CDX();
SPI_SendData (Data);
SET_CS();
return;
}
void WriteDispData(unsigned char DataH, unsigned char DataL)
{
SPI_SendData (DataH);
SPI_SendData (DataL);
}
void LCD_Init(void)
{
SET_RST();
R_BSP_SoftwareDelay (100, BSP_DELAY_UNITS_MILLISECONDS);
CLEAR_RST();
R_BSP_SoftwareDelay (100, BSP_DELAY_UNITS_MILLISECONDS);
SET_RST();
R_BSP_SoftwareDelay (200, BSP_DELAY_UNITS_MILLISECONDS);
SPI_WriteCommand (0x11); //Exit Sleep
R_BSP_SoftwareDelay (120, BSP_DELAY_UNITS_MILLISECONDS);
SPI_WriteCommand (0xB1);
SPI_WriteData (0x05); //0a
SPI_WriteData (0x3c); //14
SPI_WriteData (0x3c);
SPI_WriteCommand (0xB2);
SPI_WriteData (0x05);
SPI_WriteData (0x3c);
SPI_WriteData (0x3c);
SPI_WriteData (0xB3);
SPI_WriteData (0x05);
SPI_WriteData (0x3c);
SPI_WriteData (0x3c);
SPI_WriteData (0x05);
SPI_WriteData (0x3c);
SPI_WriteData (0x3c);
SPI_WriteCommand (0xB4); // 前面的b1-b5 是设置帧速率
SPI_WriteData (0x03);
SPI_WriteCommand (0xC0); // Set VRH1[4:0] & VC[2:0] for VCI1 & GVDD Power Control
SPI_WriteData (0x28);
SPI_WriteData (0x08);
SPI_WriteData (0x04);
SPI_WriteCommand (0xC1); // Set BT[2:0] for AVDD & VCL & VGH & VGL
SPI_WriteData (0xC0);
SPI_WriteCommand (0xC2); // Set VMH[6:0] & VML[6:0] for VOMH & VCOML
SPI_WriteData (0x0D); //54h
SPI_WriteData (0x00); //33h
SPI_WriteCommand (0xC3);
SPI_WriteData (0x8D);
SPI_WriteData (0x2A);
SPI_WriteCommand (0xC4);
SPI_WriteData (0x8D);
SPI_WriteData (0xEE);
SPI_WriteCommand (0xC5);
SPI_WriteData (0x1A);
SPI_WriteCommand (0x36); //MX,MY,RGB MODE
SPI_WriteData (0x08);
SPI_WriteCommand (0xe0);
SPI_WriteData (0x04); //2c
SPI_WriteData (0x22);
SPI_WriteData (0x07);
SPI_WriteData (0x0A);
SPI_WriteData (0x2E);
SPI_WriteData (0x30);
SPI_WriteData (0x25);
SPI_WriteData (0x2A);
SPI_WriteData (0x28);
SPI_WriteData (0x26);
SPI_WriteData (0x2E);
SPI_WriteData (0x3A);
SPI_WriteData (0x00);
SPI_WriteData (0x01);
SPI_WriteData (0x03);
SPI_WriteData (0x03);
SPI_WriteCommand (0xe1);
SPI_WriteData (0x04);
SPI_WriteData (0x16);
SPI_WriteData (0x06);
SPI_WriteData (0x06);
SPI_WriteData (0x0D);
SPI_WriteData (0x2D);
SPI_WriteData (0x26);
SPI_WriteData (0x23);
SPI_WriteData (0x27);
SPI_WriteData (0x27);
SPI_WriteData (0x25);
SPI_WriteData (0x2D);
SPI_WriteData (0x3B);
SPI_WriteData (0x00);
SPI_WriteData (0x01);
SPI_WriteData (0x04);
SPI_WriteData (0x13);
SPI_WriteCommand (0x3A);
SPI_WriteData (0x05);
SPI_WriteCommand (0x29); // Display On
R_BSP_SoftwareDelay (20, BSP_DELAY_UNITS_MILLISECONDS);
}
void BlockWrite(unsigned short Xstart, unsigned short Xend, unsigned short Ystart, unsigned short Yend)
{
SPI_WriteCommand (0x2A);
SPI_WriteData (Xstart >> 8);
SPI_WriteData (Xstart + 2);
// SPI_WriteData(Xstart);
SPI_WriteData (Xend >> 8);
SPI_WriteData (Xend + 2);
// SPI_WriteData(Xstart);
SPI_WriteCommand (0x2B);
SPI_WriteData (Ystart >> 8);
SPI_WriteData (Ystart + 1);
SPI_WriteData (Yend >> 8);
SPI_WriteData (Yend + 1);
SPI_WriteCommand (0x2c);
}
void DispColor(unsigned short color)
{
unsigned short i, j;
BlockWrite (0, COL - 1, 0, ROW - 1);
for (i = 0; i < ROW; i++)
{
for (j = 0; j < COL; j++)
{
SPI_WriteData (color >> 8);
SPI_WriteData (color);
// DelayMs(1);
}
}
}
void ClearFullScreen(void)
{
unsigned short i, j;
BlockWrite (0, COL - 1, 0, ROW - 1);
for (j = 0; j < COL; j++)
{
SPI_WriteData (i + 50);
SPI_WriteData (j + 50);
}
return;
}
void DrawColor(unsigned short ColorNumber)
{
SPI_WriteData (0xFF);
SPI_WriteData (0xFF);
return;
}
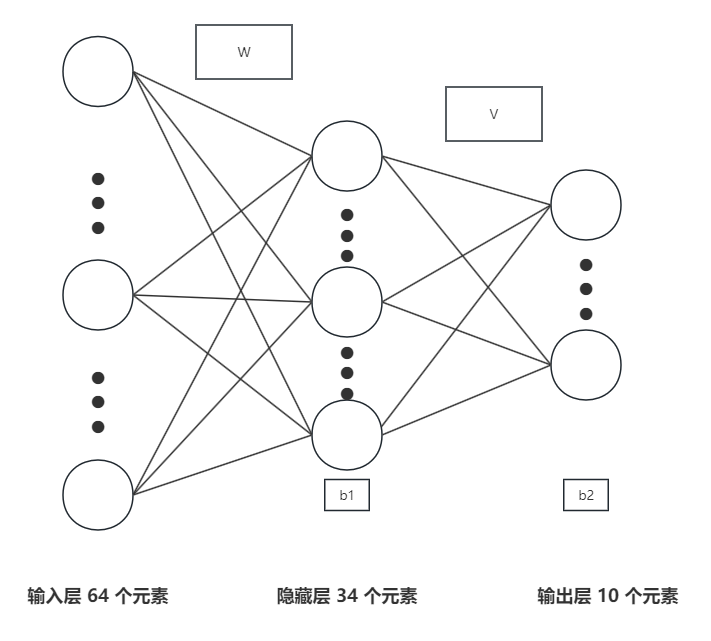
3、BP 神经网络:
代码说明:
三层网络结构:
第一层是输入层,第二层是隐藏层,第三层是输出层
神经网络预测代码说明:
神经网络预测的原理是,将目标数据输入到神经网络中,经过神经网络中参数的迭代,使之得到符合要求的数据数据,然后保存神经网络中的参数(各个节点的权重参数)。使用该网络预测时,将训练好的参数,导入到神经网络中,该神经网络就预测和神经网络中相符合的数据。
该神经网络的相关信息如下:
三层BP神经网络:
输入层有64个元素 , 隐藏层有34个元素, 输出层有10个元素
训练次数为:10000次,最终的错误率为:0.00658,学习率为:0.1 ,动量因子:0.1 训练数据总共160组 (160组中 ,分成三份)总共训练了三个手势
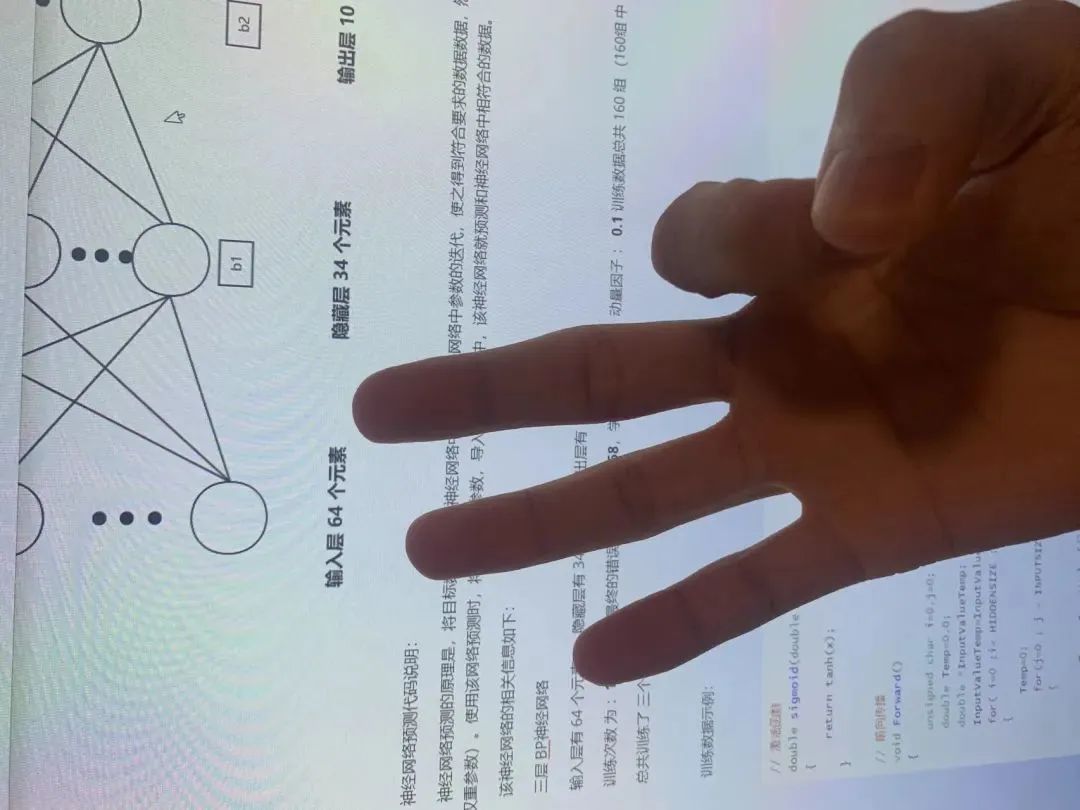
手势1 36组数据 手势2 68组数据 手势3 54组数据 上图:为编写文档时所拍,非传感器测量时图片,仅说明在采集测试数据时的手势动作
训练数据示例:
[[0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.5,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000],[0,1,0,0,0,0,0,0,0,0]],
// 手势 1 要求输出 结果 -----> [0,1,0,0,0,0,0,0,0,0]
[[0.0000,0.0000,0.5,0.5,0.0000,0.5,0.5,0.5,0.0000,0.0000,0.5,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000],[0,0,1,0,0,0,0,0,0,0]],
// 手势 2 要求输出 结果 -----> [0,0,1,0,0,0,0,0,0,0]
[[0.0000,0.0000,0.0000,0.5,0.5,0.5,0.5,0.5,0.0000,0.0000,0.0000,0.5,0.5,0.5,0.0000,0.5,0.0000,0.0000,0.5,0.0000,0.0000,0.5,0.0000,0.5,0.0000,0.5,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.5,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000],[0,0,0,1,0,0,0,0,0,0]]
// 手势 3 要求输出 结果 -----> [0,0,0,1,0,0,0,0,0,0]
// 注:以上数据仅为 测试数据中的手势数据的 一部分 ,不代表整体数据
// 预测输出数据 示例:
[-0.0023248156377385144, 0.035785164105157696, 0.05889932014156386, 0.9992514065884543, 0.0003713636538696458, -0.002541229896438062, -0.0033772818188316607, -0.0023972941452978813, 0.001043452650557289, -0.0026320033807735485]
输出数据说明:
该网络有10个数据输出 ,(如:[0,0,0,1,0,0,0,0,0,0] (从左往右)依次是 0 - 9 手势 ,但本次训练 仅仅训练了3个手势, 结果如上。
其他信息说明:
本次的隐藏层的数目依次经历了 12->24->128->34 的变化 ,具体的数目和输入输出的元素个数,没有实际的关联(网上虽然有建议) ,具体看情况而论,因为是三层网络,隐藏层的数量不可以太少,也不可以太多,太少,说简单的,输出的数据不在[0,1]的区间,太多,输出的都是0.9左右的数据
输出的数据不在[0,1]的区间
可以调整 学习率 或者 训练次数(增加),或者是动量因子(修改该参数时,学习率不变)
调整隐藏层的节点数目(往大了调)
输出的都是0.9左右的数据(过拟合)
调整隐藏层的节点数目(往小了调)(按实际情况调节)
输出数据的设定,按照激活函数的取值选择
输入数据的选择,[0-1]之间 ,为了提供训练的成功率,在输入数据中做了一些处理
训练的前提是保证网络正常(代码没有写错)
优化训练的操作说明:
对数据进行了非0即0.5 的处理 ,对于超过 特定温度值的数据为0.5 ,不超过为 0(只要有相对应的特征即可)
网络训练成功的标志,输出的数据在(本网络)[0,1]之间,并且输出的数据 对应符合 输入的数据(只要有符合的即可尝试在在设备上运行),建议训练完成的网络,在预测时,要同时多预测几个,防止是误差
// 激活函数
double sigmoid(double x)
{
return tanh(x);
}
// 前向传播
void Forward()
{
unsigned char i=0,j=0;
double Temp=0.0;
double *InputValueTemp;
InputValueTemp=InputValue;
for( i=0 ;i< HIDDENSIZE ; i++)
{
Temp=0;
for(j=0 ; j < INPUTSIZE ; j++ )
{
Temp+=InputValue[j]*InputWeight[j*HIDDENSIZE+i];
}
HiddenValue[i]=sigmoid(Temp);
}
for( i=0 ;i < OUTPUTSIZE ; i++)
{
Temp=0;
for( j = 0; j < HIDDENSIZE ;j++ )
{
Temp+=HiddenValue[j]*OutputWeight[j*OUTPUTSIZE+i];
}
OutputValue[i]=sigmoid(Temp);
}
}
}
左上角
手势1 白色
手势2 浅绿色
手势3 浅紫色
本项目还有需要优化的地方,也有着许多不足。作者水平有限,希望广大网友批评指正。
审核编辑:汤梓红
-
瑞萨电子RA系列MCU 2025年新品回顾2026-01-27 1980
-
瑞萨电子RA家族推出RA8系列高算力通用MCU2024-04-02 3812
-
AMEYA360 | 皇华:瑞萨面向电机控制应用推出性能卓越的RA8 MCU2024-02-02 1533
-
瑞萨电子宣布推出RA8D1微控制器(MCU)产品群2023-12-15 2441
-
基于瑞萨RA系列R7FA2E1A52DFJ MCU的无叶风扇控制方案2023-09-26 2365
-
使用VSCODE+GNU+J-Link开发瑞萨RA MCU(上)2023-09-04 2960
-
线下培训 | 瑞萨电子RA MCU应用开发培训课程报名开启![野火电子]2023-03-21 2447
-
【野火启明6M5开发板体验】野火启明开发板和瑞萨RA MCU介绍2022-12-14 1434
-
瑞萨RA系列MCU选型指南2022-11-08 3404
-
瑞萨MCU的相关资料分享2021-11-11 1412
-
瑞萨MCU指纹识别解决方案!2020-09-02 2770
-
瑞萨推出低功耗嵌入式开发板,简化IoT终端设备设计2020-05-14 1408
-
瑞萨电子推出32位RX23W微控制器 为IoT终端设备提供Bluetooth® 5.02019-12-04 1295
全部0条评论

快来发表一下你的评论吧 !
